dt
M

z(Fe) ;
гдеKz Iz
кинетический момент тела () относительно не-
подвижной оси Oz;

k
Mz( Fe)
сумма моментов всех внешних сил, действую-
щих на тело, относительно той же оси.
Если , то ,dKz  dt dt Iz. С учетом этих соотн о-  шений получаем дифференциальное уравнение при вращении те- ла вокруг неподвижной оси:
В уравнении (6) величина
Iz=const.
. (6)
Плоскоедвижениетвердоготела При плоском движении фигура () перемещается поступательно вместе с центром масс (точка C) и вращается вокруг центра масс (рис. 136). 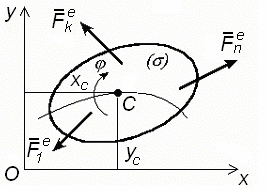 Рис. 136
Запишем уравнения плоского движения:
xc = xc(t); yc = yc(t); zc = zc(t).
 Действующие силы Fe,Fe,Fe вызывают плоское движение фи- Действующие силы Fe,Fe,Fe вызывают плоское движение фи-
гуры ().
1 2 n
 Так как плоское движение состоит из поступательного и враща- тельного движений, то нужно записать три дифференциальных уравнения: (7) где m–масса фигуры (); Icz– момент инерции фигуры относительно оси Cz, перпендику- лярной плоскости чертежа. Примеррешениязадачи
На рис. 137 представлена механическая система, состоящая из четырех твердых тел, соединенных между собой при помощи не- растяжимых нитей. Заданы следующие величины: m1 = 8 кг; m2 = 10кг; m3 = 4 кг; m4 = 6 кг – массы тел; F = 80 Н – сила, приложенная к телу 1; f1 = 0,2 – коэффициент трения скольжения между телом 1 и поверхностью; =30 о - угол наклона поверхности к горизонту; = 20 о – угол наклона силы F к траектории движения тела 1; M = 2Нм – момент пары, приложенной к шкиву 2; r2 = 1/2R2; R2 = 0,8 м – малый и большой радиусы шкива 2; 2= 0,6 м – радиус инерции это- го шкива; R3=0,4м; R4=0,6м– радиусы колеса 3и цилиндра 4; g = 9,8 м/с2. Цилиндр 4 катится по плоскости без скольжения. Определить ускорение тела 1 ( a1).
Решение
Обозначим цифрами все нити в системе и найдем кинематиче- ские соотношения между всеми телами системы, выразив их через ускорение тела 1– a1.
a R R
   a1 a1 ,32 ,a a1 a1 ,32 ,a1 r2 a3 2 a1 2a1,r2a3 a3; угловое ускорение шкива 2 2 a1 r2 a1 r2 a1 |
 Скачать 304.15 Kb.
Скачать 304.15 Kb.