1-1 вар. Импульсный рлс
 Скачать 288.5 Kb. Скачать 288.5 Kb.
|

|
КНИТУ им. А.Н. Туполева Институт радиоэлектроники и телекоммуникаций Курсовая работа на тему: «Импульсный РЛС» Вариант 1-1 Выполнил: студент гр.5471 Н.В.Коровин Проверил: М.Ю.Застела Казань 2015 Содержание Введение 3 На основании перечисленных данных можно выполнить расчет основных технических показателей РЛС. Расчет ведется, как правило, методом последовательного приближения с неоднократным уточнением и согласованием значений величии. 7 Исходные данные: 7 10) средняя мощность излучения передатчика не должна превышать 100 Вт, а импульсная—100 кВт. 8 Расчет технических показателей импульсной РЛС 9 Список использованной литературы 15 ВведениеРадиолокацией называется обнаружение объектов (целей) и определение их пространственных координат и параметров движения с помощью радиотехнических средств и методов. Этот процесс называется радиолокационным наблюдением, а устройства такого назначения — радиолокационными станциями (РЛС) или радиолокаторами. В настоящее время радиолокация широко применяется для управления объектами и, в частности, для навигации, т. е. для ориентирования самолетов, морских и космических кораблей. Устройства радиолокации, радиоуправления и радионавигации в совокупности образуют радиотехнические системы. К радиолокационным целям (или просто целям) относятся: пилотируемые и беспилотные летательные аппараты, морские и речные корабли, различные наземные и надводные объекты, естественные и искусственные космические тела, атмосферные образования и др. Если цель точечная, то ее положение в пространстве полностью определяется тремя координатами. В сферической системе координат это наклонная дальность Д, азимут 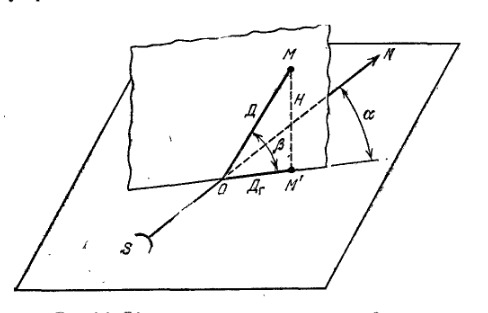 Рис. 1 - Сферические координаты точечной цели Наклонной дальностью Д называется расстояние по прямой от РЛС до цели М. Азимут цели Угол места Наряду со сферической системой координат в радиолокации применяют цилиндрическую систему с координатами: горизонтальная дальность ДГ, азимут Горизонтальная дальность Дг = ОМ' является проекцией линии наклонной дальности ОМ на горизонтальную плоскость. Высота цели Н равна длине перпендикуляра, опущенного из М на горизонтальную плоскость, т. е. Н = ММ'. Очевидно, что  Радиотехнические измерения дальности называются радиодаль-нометрией, а угловых координат — радиопеленгацией. Измерению координат и скорости целей предшествует их обнаружение, разрешение и опознавание. Под разрешением целей понимают определение количества целей в группе, их протяженности, класса и т. д. Опознавание цели означает установление ее существенных признаков, в частности, государственной принадлежности. Совокупность сведений, получаемых радиолокационными средствами, называется радиолокационной информацией. Последняя передается на командные пункты, счетно-решающие приборы и исполнительные устройства. В курсовой работе необходимо рассчитать РЛС с импульсным излучением. Структурная схема такой РЛС1 показана на рис. 2. В схеме, показанной на рис. 2, передатчик формирует прямоугольные радиоимпульсы с заданной длительностью (определяется требованиями разрешения по дальности и энергетическим затратами) и частотой повторения (определяется максимальной дальностью) и через передающую антенну излучает их в пространство. Приемник принимает излученный сигнал и преобразует его в видеоимпульсы. 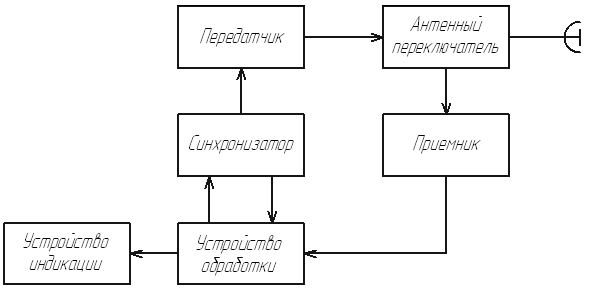 Рис. 2. Структурная схема РЛС с импульсным излучением Устройство регистрации (в общем случае включающее не только индикатор – ЭЛТ или цифровой дисплей, но и бортовую ЭВМ) проводит непосредственно измерение и выдачу данных о цели (дальность, азимут и скорость сближения). Входящий в состав блока обработки синхронизатор определяет момент подачи очередного импульса (заданная длительность импульса формируется в генераторе импульсов передатчика, который представляет собой ждущий мультивибратор) и момент запуска развертки ЭЛТ. Анализ тактических задач, решаемых с помощью проектируемой радиолокационной станции, и условий применения этой станции позволяет получить следующие данные: 1) характеристику типа и основного назначения РЛС; 2) количество измеряемых координат целей; 3) размеры зоны обзора; 4) допустимое значение периода обзора; 5) требования к точности измерения координат; 6) требования к разрешающей способности; 7) характеристики целей (среднее значение эффективной отражающей площади, закономерности флюктуации отраженных сигналов, закон движения центра массы и др.); 8) сведения об атмосферных условиях, в которых будет работать станция; 9) сведения о наиболее вероятных помехах работе РЛС; 10) некоторые ограничения в выборе технических показателей РЛС, например, максимально допустимые размеры антенны, до На основании перечисленных данных можно выполнить расчет основных технических показателей РЛС. Расчет ведется, как правило, методом последовательного приближения с неоднократным уточнением и согласованием значений величии. Исходные данные:Станция должна характеризоваться следующими данными: 1) обнаруживаются самолеты, летящие на высоте до 10 км с вероятностью правильного обнаружения РПО=0,5 и вероятностью ложной тревоги РЛТ=10-3; 2) дальность действия 100 км, сектор обзора по азимуту 90°, сектор обзора по углу места 6°; 3) точно определяются дальность и угол места целей, а азимут оценивается приближенно; 4) среднеквадратические значения ошибок измерения дальности 50 м, угла места 0,3°, азимута 3°; 5) разрешающая способность по дальности 20 м, по углу места 0,5°; 6) период обзора не более 10 сек; 7) среднее значение эффективной отражающей площади цели 10 м 2, закон флюктуации отражающей площади — приблизительно экспоненциальный; 8) станция должна работать в условиях тумана, дождя, гроз и т. д.; 9) наибольший размер зеркала антенны не должен превышать 3 м; 10) средняя мощность излучения передатчика не должна превышать 100 Вт, а импульсная—100 кВт.Расчет технических показателей импульсной РЛСДля оценки длины волны РЛС прежде всего обратимся к графику рис.3 [1] для Dmax - 100 км. 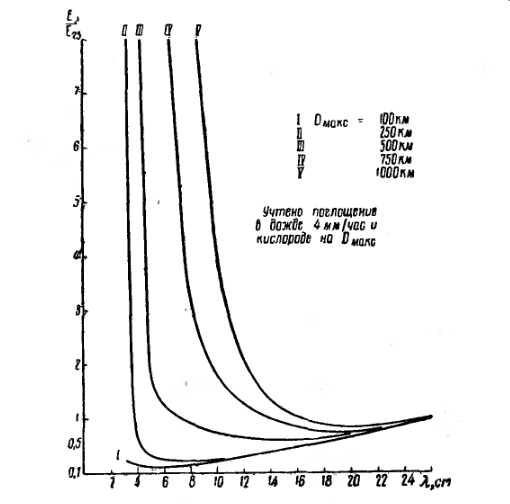 Рис.3 - Изменение энергии излучаемых колебаний в зависимости от рабочей длины волны Как видно, оптимальная длина волны равна приблизительно 5-6 см. При уменьшении длины волны до 3 см необходимая энергия в импульсе возрастает приблизительно в два раза, что, по-видимому, является допустимым. Но больше сокращать волну не следует, так как потери будут резко расти. Приняв С учетом ухудшения реальной разрешающей способности по сравнению с потенциальной, определяемой шириной луча, разрешающая способность по углу места будет равна приблизительно 0,7°, что в 1,4 раза хуже сформулированного требования по разрешению. Но с этим ничего сделать нельзя, так как ни уменьшение длины волны, ни увеличение размеров антенны в данном случае допущено быть не может. При последовательном обзоре по угловым координатам связь между параметрами системы обзора характеризуется формулой: где: аз – ширина ДН луча антенны по азимуту; Тобл – период облучения цели; Фаз – сектор сканирования пространства по азимуту; Фум – сектор сканирования пространства по месту. Относительный период обзора целесообразно принять равным среднему значению (Кобз)ср=2. При поглощении энергии на всей дальности действия РЛС имеет место следующее соотношение:  (2) (2)где: kш=5 – коэффициента шума приемника РЛС (значение 5 можно получить при использовании ЛБВ на длине волны 3 см); kp – коэффициент различимости; Sэф – эффективная площадь раскрыва антенны. 1) Эффективную площадь раскрыва антенны можно выразить чрез угловые размеры луча: 2) Теоретически необходимое отношение сигнал/шум на входе приемника при обнаружении сигнала с неизвестными начальной фазой и амплитудой для РПО=0,5 и РЛТ=10-3 находим при помощи графика3 qср = 20, потери в тракте (Паi) примем равными 10. Тогда kр = 3) Коэффициент поглощения δп( 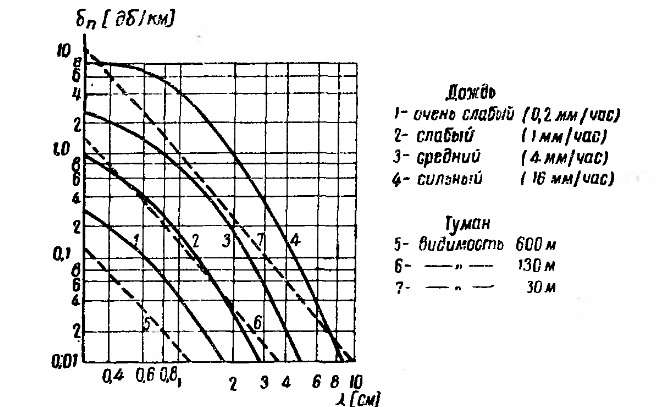 Рис. 4 - Зависимость коэффициента поглощения энергии радиоволн δп от длины волны Множитель поглощения буде равен Рассмотрим (2) с учетом (3):  Далее выразим размеры луча по азимуту:  Совместно решая два уравнения, определим период облучения цели и размер луча по азимуту:   Решая систему, получаем: аз7.52 0 и Тобл=41.8 мс. Период повторения импульсов равен: Принимаем Ти=0.7 мс, тогда частота повторения импульсов равна: Находим число импульсов в пачке: Определяем длительность излучаемых РЛС импульсов: где: R – разрешающая способность по дальности Принимаем Определяем мощность излучения РЛС в импульсе: Потенциальные составляющие ошибок не превышают значений, требуемых в задании: С учетом даже существенного ухудшения реальной точности по сравнению с потенциальными возможностями требуемая точность измерения координат будет обеспечена. Список использованной литературы
1 Белоцерковский В.Г. Основы радиолокации и радиолокационные устройства. М.: Связь, 1978. с. 56. |