БТС Сарсенбаев Т.. Контрольная работа по дисциплине Безопасность транспортных средств студент группы 16удз3 Сарсенбаев Т. Ж
 Скачать 0.94 Mb. Скачать 0.94 Mb.
|

|
МИНИСТЕРСТВО ОБРАЗОВАНИЯ И НАУКИ РЕСПУБЛИКИ КАЗАХСТАН ВОСТОЧНО-КАЗАХСТАНСКИЙ ГОСУДАРСТВЕННЫЙ УНИВЕРСИТЕТ ИМЕНИ Д. СЕРИКБАЕВА Факультет инженерии Кафедра «Машиностроение» КОНТРОЛЬНАЯ РАБОТА по дисциплине «Безопасность транспортных средств»
  Усть-Каменогорск, 2019 Усть-Каменогорск, 2019Содержание
1 ОПРЕДЕЛЕНИЕ ПАРАМЕТРОВ ОБГОНА Обгон - опережение движущегося впереди на минимальной безопасной дистанции транспортного средства или состава транспортных средств, связанное с выездом из занимаемой полосы [5]. Согласно Правилам дорожного движения (п.11.1) «водитель перед началом маневра обгон должен убедиться в том, что полоса движения, на которую он намерен выехать, свободна на достаточном расстоянии для обгона» [5]. В зависимости от условий движения на дороге обгон может быть: - с постоянной скоростью; - с возрастающей скоростью. Обгон с постоянной скоростью характерен для свободного, нестеснённого движения автомобиля в загородных условиях. Тогда водитель обгоняющего автомобиля имеет впереди себя достаточное пространство для предварительного разгона до большей скорости. Эта скорость должна быть больше скорости обгоняемого автомобиля. Обгоны с постоянной скоростью возможны на дорогах с проезжей частью шириной более 7…8 м и интенсивностью движения в обоих направлениях менее 40…60 автомобилей в час, т.е. с интервалом движения около 1 мин. В этих условиях быстроходный автомобиль, догнав медленно движущийся автомобиль, уменьшает скорость и некоторое время движется позади него с той же скоростью. Водитель сзади движущегося автомобиля внимательно следит за потоком и при появлении перед обгоняемым автомобилем достаточно свободного расстояния начинает обгон, сочетая его с разгоном. Манёвр обгона можно разделить на три фазы: отклонение обгоняющего автомобиля влево и выезд на соседнюю полосу движения встречного направления; движение слева от обгоняемого автомобиля и впереди него; возвращение обгоняющего автомобиля на свою полосу впереди обгоняемого автомобиля [1]. Возможность выполнения обгона зависит от скорости обгоняемого и скоростных свойств обгоняющего ТС, наличия необходимого интервала во встречном потоке. Обгон может выполняться «с хода» и с ожиданием возможности обгона, когда начальная скорость обгоняющего ТС равна скорости обгоняемого автомобиля. Последняя схема является наиболее типичной для сегодняшнего состояния транспортного потока. На рисунке 1 представлена схема обгона «с ожиданием». Перед началом обгона водитель обгоняющего ТС1 следует за обгоняемым ТС2. В процессе обгона в определённый момент (в данном случае расчёт ведётся для положения 1.1, когда обгоняющий TC1 догнал ТС2) водитель должен принять окончательное решение о завершении или прекращении обгона. В случае продолжения обгона ТС1 опережает ТС2 и возвращается на свою полосу движения (положение 1.2). В момент завершения обгона между обгоняемым и обогнавшим ТС должен быть временной интервал t21, которому соответствует дистанция S21; в последующие моменты времени величина S21 быстро увеличивается, так как скорость обгоняющего ТС выше, чем у обгоняемого. 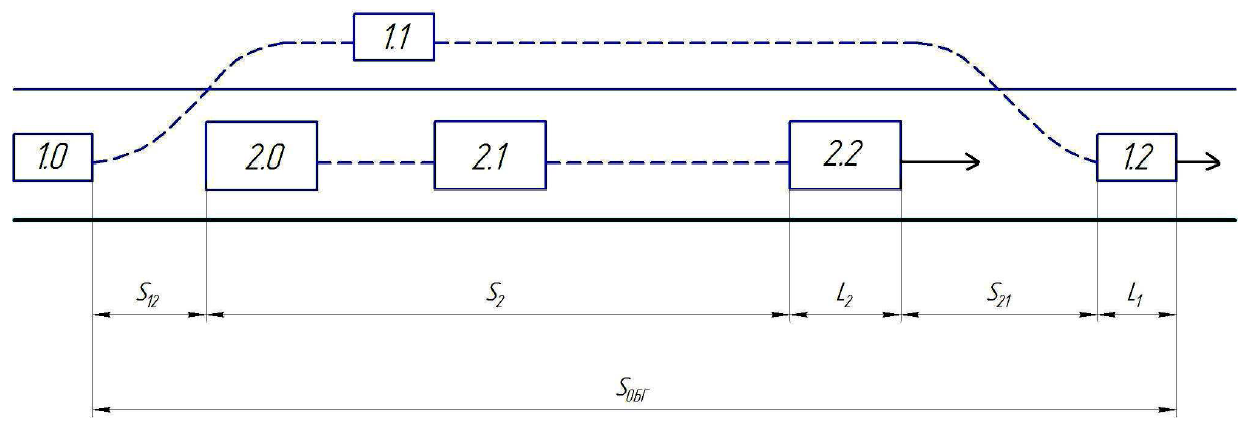 Рисунок 1. Схема обгона «с ожиданием» с временным интервалом t12, которому соответствует дистанция S12 Разгон ТС при обгоне должен выполняться с максимальной интенсивностью и прекращается плавно после его завершения. Реализация такого режима возможна только в том случае, когда имеется необходимый интервал времени между обгоняемым ТС и автомобилем, двигающимся впереди него навстречу. В противном случае водитель обгоняющего ТС после завершения обгона будет вынужден экстренно затормозить. Описанный режим движения ТС обеспечивает минимальные значения пути и времени обгона по схеме «с ожиданием». Значения времен обгона tобг, пути обгона Sобг и скорости обгоняющего ТС в момент завершения обгона Vобг в зависимости от скорости обгоняемого ТС - определяют предельные условия, при которых обгон может быть завершён. На рисунке 2 показана схема незавершённого обгона. 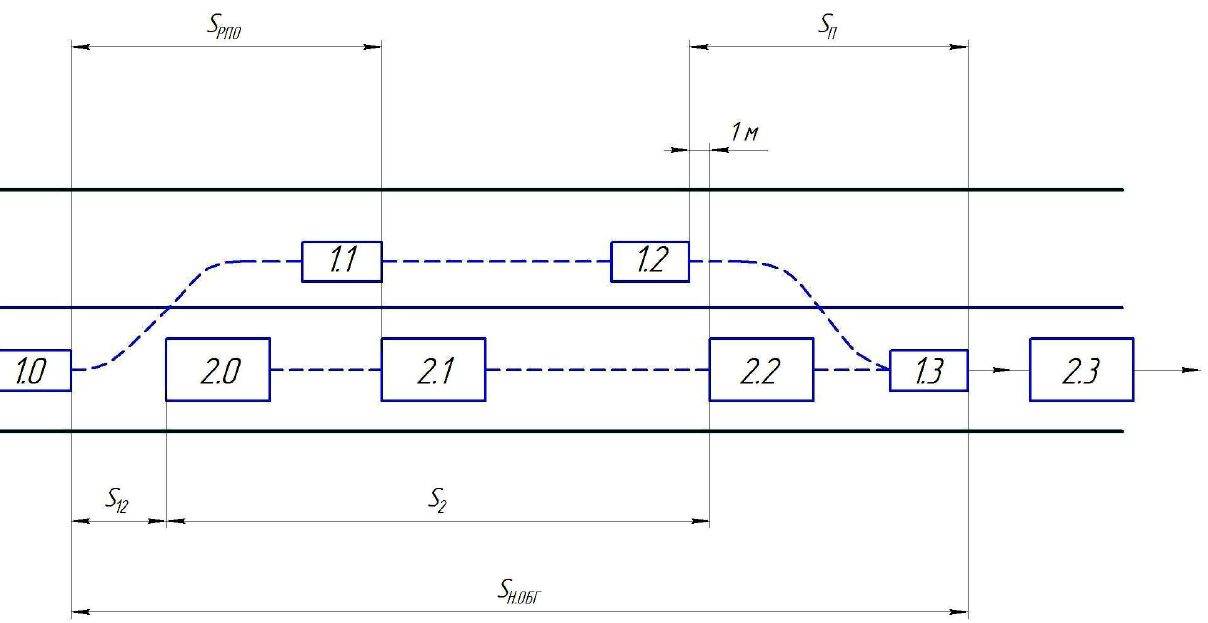 Рисунок 2. Схема незавершённого обгона В положении 1.1 водитель принимает решение прекратить обгон и осуществляет торможение. В положении 1.2, когда обгоняющее ТС отстаёт от обгоняемого автомобиля на один метр водитель прекращает торможение и так как скорость ТС1 в этот момент меньше, чем у ТС2, то последнее уходит вперёд и водитель обгоняющего ТС может вернуться на свою полосу движения, совершая маневр за время tп (время перестроения). За это время ТС проходит путь Sп. Торможение выполняется с максимальным замедлением для данной категории ТС. Значения времени tн.обг и пути Sн.обг незавершённого обгона определяют предельные условия, при которых возможно избежать ДТП при незавершённом обгоне. Сопоставление значений tобг и tн.обг и Sобг и Sн.обг позволяет оценить правильность выбора момента о возможности или невозможности завершить обгон. Для того чтобы решение о прекращении обгона повышало безопасность (т.е. уменьшало вероятность столкновения со встречным автомобилем) по сравнению с решением продолжать обгон, необходимо, чтобы время и путь незавершённого обгона были меньше, чем при его завершении. Разница между этими значениями завершённого и незавершённого обгонов определяет величину резервов безопасности. Если резервы равны нулю или становятся отрицательными, то это означает, что решение о необходимости прекратить обгон надо было принимать раньше, чем обгоняющее ТС догонит обгоняемое ТС. Вычисление рассмотренных выше показателей возможно графоаналитическим и аналитическим методом. Чтобы описать методику вычислений рассмотрим график, приведённый на рисунке 3. По оси абсцисс отложено время t в секундах. По оси ординат вверх - путь, проходимый TC1 в метрах, а вниз - скорость обгоняющего ТС. В соответствии с ранее изложенным в первом квадранте построены графики «время-путь» обгоняющего автомобиля, а в четвёртом квадранте - график «время-скорость» обгоняющего автомобиля при разгоне с максимальной интенсивностью. Чтобы определить искомые показатели, сначала необходимо построить измерения указанных зависимостей пути и скорости от времени. Вычисление значений скорости при заданном времени разгона проводится по формуле (1.1):
где Vmax - максимальная скорость обгоняющего ТС, км/ч; t - текущее время, с; TV- постоянная времени разгона, с.
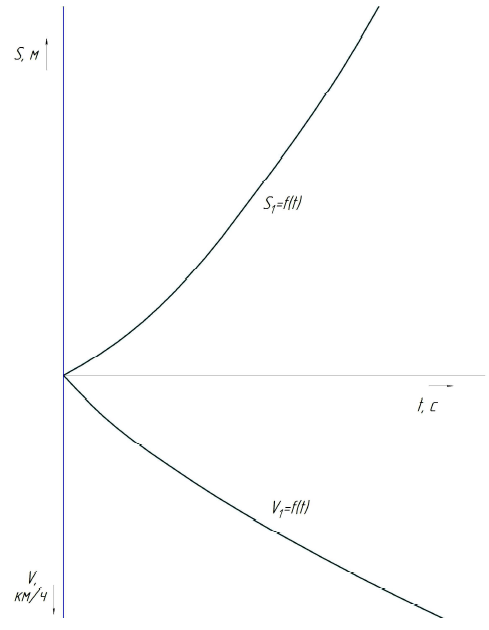 Рисунок 3. Зависимость пути и скорости обгона от времени Условия завершения обгона можно записать в виде S = S12 + S2 + S21 + L1 + L2, м, (1.3) где S12 - дистанция между обгоняемым ТС перед обгоном, с; S2 - путь, проходимый обгоняемым ТС за время обгона, с; S21 - дистанция между обгоняемым и обгоняющим ТС после завершения обгона, м; L1 - длина обгоняющего ТС, м; L2 - длина обгоняемого ТС, м. Вычисление значений S12, S2, S21 производится по формулам (1.4) - (1.6):
Анализируя формулы (1.4) - (1.6), мы можем заметить, что для вычисления Sобг нам не хватает значения tобг. Чтобы найти значение tобг, перепишем уравнение (1.15) в виде: Sобг - S12 - S21 - L1 - L2 = 0, м. (1.7) Решение уравнения (1.7) возможно аналитическим или графоаналитическим методами. Графоаналитический метод расчета Решение графоаналитическим способом показано на рис. 4 и представляет собой последовательность следующих действий: 1. Задаваясь скоростью V2, с помощью зависимости «время-скорость», находим значения t0 и S0 соответствующие началу, обгона. 2. От точки А (с координатами [S0; t0]) откладываем вверх величину: Sобг = S12 + S21 + L1 + L2, м. (1.8) 3. Из найденной точки С, ордината которой соответствует величине S+Σобг, проводим под углом a (V2=tga, выраженным в м/с) прямую до пересечения с кривой разгона обгоняющего автомобиля «время-путь». Точка пересечения - MSс координатами (Sм; tм) является моментом завершения обгона. Время и путь разгона будут соответственно равны: tобг = tм - t0, с; (1.9) Soбг = Sм - S0, м. (1.10) 4. Для определения скорости в момент завершения обгона необходимо из точки tт опустить вниз перпендикуляр до пересечения с кривой V1=f (t), т.е. зависимостью «время-скорость» для обгоняющего ТС в момент завершения обгона - Vобг. 5. Для вычисления параметров незавершённого обгона из точки А с координатами (S0; t0) откладываем вверх величину: Σрпо = S12. (1.11) 6. Из найденной точки В под углом a (V2 = tga) проводим прямую до пересечения с кривой разгона автомобиля «время-путь» в точке DS. Точка пересечения соответствует положению 1.1 автомобиля на рис. 2. 7. Для определения скорости автомобиля в момент принятия решения о прекращении обгона Vрпо из полученной точки DSопустим перпендикуляр до пересечения с кривой «время-скорость». Получим точку DV, ордината которой соответствует скорости ТС в момент принятия решения о прекращении обгона. 8. Для определения параметров последующего торможения необходимо из полученной точки DS отложить вниз расстояние, равное одному метру, и получить точку Е. Из точки Е проводим кривую торможения, определённую по формуле:
где St- тормозной путь, м; tт - время торможения, с; Jт = Jт max - максимальное замедление для обгоняющего ТС, м/с2. Точка пересечения кривой торможения и прямой перемещения обгоняемого автомобиля FSсоответствует положению 1.2 обгоняющего автомобиля на рис. 2 и определяет момент завершения торможения. Для определения скорости в момент завершения торможения необходимо из точки F опустить вниз перпендикуляр. Кроме того из точки DV под углом β (JT=tgβ, в км/ч) провести линию до пересечения с проведенным перпендикуляром в точке FV. Ордината их пересечения - скорость в момент завершения торможения. 9. Определение расстояния перестроения на свою полосу движения производится по формуле:
10. Определение показателей обгона. Показатели обгона определяются с помощью построенного графика на рис. 4. Показатели завершённого обгона:
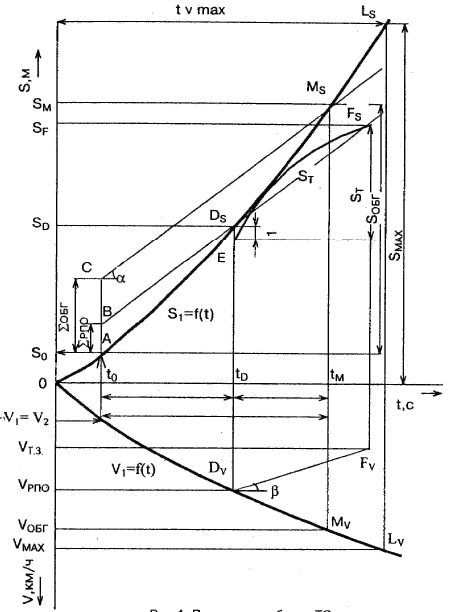 Рисунок 4. Показатели обгона транспортных средств Показатели незавершённого обгона:
1.2 Аналитический метод расчета 1.2.1 Завершенный обгон Для аналитического решения задачи в уравнение (1.7) надо подставить аналитическое выражение входящих в него членов, в результате подстановки получим выражение:
где Sобг - выражение в первой скобке, м; ΔS - погрешность вычислений, м. Для решения уравнения (20) необходимо предварительно определить значения S0 и t0, соответствующие значениям V1=V2, которые были предварительно определены по табл. 4. Для этого уравнение (1.1) необходимо записать в виде:
Разделив ΔV на V2, определим относительную погрешность вычислений V2 при заданном значении t. Примем, что величина относительной погрешности не должна быть более ±1%:
Подставляя в уравнение (1.21) различные значения t, определим величину t0, удовлетворяющую условию (1.22). Подставив значение t0 в уравнение (1.20), вычислим величину S0. Найденные значения S0 и t0 подставим в уравнение (1.20). Примем, что относительная погрешность DSне должна быть более ±1%:
Подставляя в уравнение (1.20) различные значения t, найдём величину tM (см. рис. 3), удовлетворяющую условию (1.23) и соответствующую расстоянию обгона Sобг. Время обгона определим из уравнения (1.14). 1.2.2. Незавершённый обгон Чтобы определить параметры незавершённого обгона, надо в выражении (1.20) величину Σобг заменить на величину Σн.обг и описанным выше способом найти значения tD, соответствующие моменту принятия решения о прекращении обгона, и значения Sрпо и Vрпо. Условие вычисления пути торможения Sт, обеспечивающего возврат на свою полосу в результате прекращения обгона, можно записать в виде:
где SТ - тормозной путь, определяемый по формуле:
где V2 - скорость обгоняемого автомобиля; tт - время торможения; ΔS - погрешность вычислений. Принимая, что величина относительной погрешности не должна быть более ±1%,
Подставляя различные значения t в выражение (1.25), определим величину tт удовлетворяющую условию (1.26). Подставляя значение tт в уравнение (1.25) найдём величину Sт. Значение скорости в момент завершения торможения VЗ.Т найдём из выражения:
Путь, проходимый автомобилем при возвращении на свою полосу движения, определяется из уравнения (1.13). Время незавершённого обгона tн.обг определяется по формуле (1.16). Путь, проходимый ТС Sн.обг, вычисляется по формуле:
1.2.3 Определение резервов времени и пути Для определения возможности избежать ДТП при решении прекратить обгон в соответствии со схемой, приведённой на рисунке 1, определяются величины резервов времени res t и пути res S по формулам: res t = tобг - tн.обг , с. (1.29) res S = Sобг - Sн.обг , м. (1.30) Знак минус означает отсутствие резервов и невозможность избежать ДТП путём торможения. 1.2.4 Определение показателей завершённого и незавершённого обгонов Определение показателей производится для каждого значения скорости обгоняемого ТС V2. 2 ОПРЕДЕЛЕНИЕ ЗАМЕДЛЕНИЯ, ВРЕМЕНИ И ПУТИ ТОРМОЖЕНИЯ Общее время, затрачиваемое на процесс торможения, складывается из нескольких величин: - время реакции водителя, которое зависит от его субъективных психологических качеств и от степени квалификации; - время срабатывания тормозного привода. Определяет момент времени от начала нажатия на тормозную педаль до начала торможения. Это время зависит от типа тормозного привода. Наибольшее значение у автомобилей с пневматическим приводом. При гидравлическом приводе тормозов время значительно меньше; - время нарастания замедления с момента действия тормозов до начала постоянного максимального торможения; - время полного (интенсивного) торможения; - время спада замедления. Следует отметить, что после прекращения торможения (педаль тормоза отпущена) замедление автомобиля снижается не мгновенно и его следует учитывать, когда торможение ведется не до полной остановки. Для определения времени торможения представим замедление в следующем виде:
Преобразовав и проинтегрировав выражение, определим время торможения:
где vн и νκ - значения скорости автомобиля соответственно в начале и конце торможения, выраженные в м/с. Для скорости, выраженной в км/ч:
При торможении автомобиля до полной остановки, когда vк=0, выражение (2.3) упростится Тормозной путь зависит от характера замедления автомобиля и представляет собой путь, проходимый автомобилем за время полного торможения, в течение которого замедление имеет максимальное значение. Тормозной путь для заданных скоростей движения в м/с и км/ч соответственно:
Тормозной путь до полной остановки для начальной скорости в км/ч:
Тормозной путь автомобиля характеризуется квадратичной зависимостью от скорости, т.е. при возрастании начальной скорости тормозной путь быстро увеличивается. В формулах (2.3-2.5) не учтен ряд конструктивных и эксплуатационных факторов, существенно влияющих на эффективность торможения. В действительности значения времени и пути торможения могут быть несколько больше, чем рассчитанные по этим формулам. Для согласования результатов теоретических расчетов с эксплуатационными данными служит коэффициент эффективности торможения kэ. Он учитывает непропорциональность тормозных сил на колесах нагрузкам, приходящимся на колеса, а также износ, регулировку, замасливание и загрязненность тормозных механизмов. Данный коэффициент показывает, во сколько раз действительное замедление автомобиля меньше теоретического, максимально возможного на данной дороге. Значение коэффициента эффективности торможения составляет 1,2 для легковых автомобилей и 1,4‑1,6 - для грузовых автомобилей и автобусов. С учетом коэффициента эффективности торможения формулы для определения времени торможения и тормозного пути автомобиля преобразуются к следующему виду:
Для случая торможения до полной остановки:
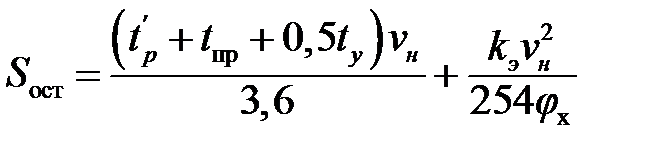
Остановочным называется путь, проходимый автомобилем от момента, когда водитель заметил препятствие, до полной остановки автомобиля. Остановочный путь больше, чем тормозной, так как он кроме тормозного пути дополнительно включает в себя путь, проходимый автомобилем за время реакции водителя, время срабатывания тормозного привода и увеличения замедления:
где t`p - время реакции водителя (0,2-1,5 с), зависящее от его возраста, квалификации, утомляемости и т.д.; tпр - время срабатывания тормозного привода от момента нажатия на тормозную педаль до начала действия тормозных механизмов, зависящее от конструкции тормозного привода и его технического состояния (0,2 с для гидравлического, 0,6 с - для пневматического, 1,0 с - для автопоезда); ty - время увеличения замедления от нуля до максимального значения (0,2-0,5 с); vн - скорость автомобиля в начале торможения, км/ч. Выражение (2.9) получено при допущении, что в течение времени увеличения замедления автомобиль движется равнозамедленно и замедление в этом случае составляет (0,5j3max). Остановочный путь, как и тормозной путь, характеризуется квадратичной зависимостью от скорости. Остановочный путь автомобиль проходит за остановочное время:
Для наглядного представления изменения скорости v и замедления j3 в процессе торможения используют тормозную диаграмму (рис. 2.1), представляющую собой графические зависимости указанных параметров от времени. Диаграмма торможения характеризует интенсивность торможения автомобиля с учетом всех составляющих остановочного времени. 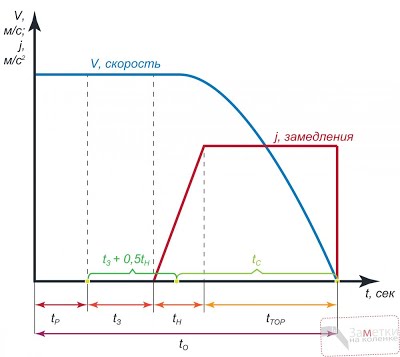 Рисунок 2.1. Диаграмма торможения автомобиля 3 ОПАСНЫЕ ПРОЦЕССЫ, ВОЗНИКАЮЩИЕ ПРИ ДОРОЖНО-ТРАНСПОРТНЫХ ПРОИСШЕСТВИЯХ Дорожно-транспортное происшествие (ДТП) - это событие, возникшее в процессе движения по дороге автотранспортного средства и с его участием, при котором погибли или ранены люди, повреждены транспортные средства, сооружения, грузы, окружающая среда, либо причинен иной материальный ущерб. ДТП является следствием транспортной аварии, возникшей в процессе дорожного движения из-за отказов транспортного средства, ошибок водителей, пассажиров, пешеходов, повреждений дорог, путей, придорожных сооружений и транспортируемых грузов. В каждом дорожно-транспортном происшествии условно можно выделить три фазы: начальную, кульминационную и конечную [1]. Все три фазы неразрывно связаны между собой. Каждая фаза является логическим продолжением предыдущей и в свою очередь предопределяет развитие последующей фазы. Начальная фаза ДТП характеризуется условиями движения автомобиля и пешеходов перед возникновением опасной ситуации. Под опасной ситуацией (обстановкой) понимают такую дорожную ситуацию (обстановку), при которой участники движения должны немедленно принять все имеющиеся в их распоряжении меры для предотвращения происшествия и снижения тяжести его последствий. Если эти меры не приняты или оказались недостаточно эффективными, то в процессе сближения автомобилей и пешеходов опасная обстановка перерастает в аварийную. Аварийной ситуацией называют такую дорожную ситуацию, при которой участники движения уже не располагают технической возможностью предотвратить ДТП, и последнее становится неизбежным. Кульминационная фаза ДТП характеризуется событиями, вызывающими наиболее тяжелые последствия (разрушение автомобилей, травмирование пешеходов, пассажиров и водителей). Если в ДТП участвует относительно немного автомобилей и пешеходов, то кульминационная фаза продолжается недолго (обычно несколько секунд) и развивается на участке дороги, имеющем небольшую протяженность. В особенно неблагоприятных случаях, когда в происшествие вовлечены десятки и даже сотни автомобилей (так называемые цепные ДТП), продолжительность кульминационной фазы увеличивается и может составить несколько минут. Соответственно возрастают и размеры зоны дорожно-транспортного происшествия. Конечная фаза ДТП следует за кульминационной. Конец ее часто совпадает с прекращением движения автомобилей. Однако в некоторых случаях, например, при возникновении пожара на опрокинувшемся автомобиле, конечная фаза ДТП продолжается и после его остановки. Все опасные процессы, возникающие при ДТП, происходят в кульминационной фазе ДТП. Для того чтобы лучше понять причины получения тяжелых травм водителем и пассажирами при ДТП, рассмотрим опасные процессы возникающие при ДТП. Степень повреждения при ударе участников ДТП о выступающие части кабины автомобиля определяется факторами: частью тела, на которую приходится удар; скоростью, силой и продолжительностью удара; частью тела о которую ударяется пострадавший, и площадью удара; способностью конструкции машины к деформации при ударе и характером повреждении. Что же происходит при столкновении автомобилей? Во-первых, удар самого автомобиля о препятствие, так называемый "первичный удар", в результате чего, например, при лобовом (фронтальном) ударе деформируется передняя часть кузова. При этом под лобовым, или фронтальным, подразумевается удар, приходящийся на переднюю часть автомобиля (столконовение транспортного средства передней частью с движущимся или покоящимся объектом, причем действие ударной силы совпадает с направлением движения центра тяжести). Во время испытаний автомобиля методом наезда на малодеформируемое препятствие со скоростью 50 км/ч передняя часть кузова деформируется примерно на 60 см за 0,1 с, а кинетическая энергия автомобиля стандартных размеров массой 1800 кг ,в момент удара равна 16 800 Дж. Вся эта энергия при столкновении должна поглотиться за доли секунды. Если тело человека не удерживается на сиденье специальной системой, например, ремнями безопасности, то оно под действием сил инерции продолжает двигаться вперед со скоростью, которую имел автомобиль в момент "первичного удара", т. е. 50 км/ч. При этом человек ударяется о детали внутреннего оборудования уже во время остановки самого автомобиля, подвергаясь крайне высоким перегрузкам. В этот момент происходит "вторичный удар" уже человека об элементы конструкции внутри автомобиля. Деформация элементов внутреннего оборудования кузова от удара о них тела человека составляет 2 - 5 см. Различие в величинах деформаций передней части кузова (60 см) в результате удара автомобиля о препятствие и деталей его внутреннего оборудования под действием тела человека (2 - 5 см) означает, что человек воспринимает значительно большие перегрузки, чем автомобиль. В результате полученного удара замедление на уровне груди достигает 30 - 40 g, т. е. почти сорокократные перегрузки, а на уровне головы 70 g. На рис. 3.1 показаны последовательно фазы перемещения и удары тела водителя, не закрепленного ремнями безопасности, при лобовом (фронтальном) ударе автомобиля. Доказано, что при лобовом ударе о препятствие люди, находящиеся внутри автомобиля, испытывают те же перегрузки, что и при падении с различной высоты. Например, тяжесть травм, получаемых человеком при наезде автомобиля на препятствие со скоростью 30 км/ч, соответствует падению человека с высоты 3,5 м. Тяжесть травмирования при лобовом ударе автомобиля резко возрастает с увеличением скорости его движения, при этом .возрастание скорости в 2 раза эквивалентно росту высоты падения в 4 раза (рис. 3.2). 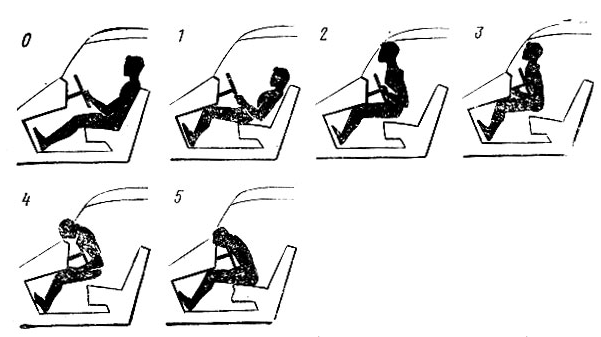 Рисунок. 3.1. Фазы (0 - 5) перемещения человека, не закрепленного ремнями безопасности, внутри автомобиля при фронтальном столкновении 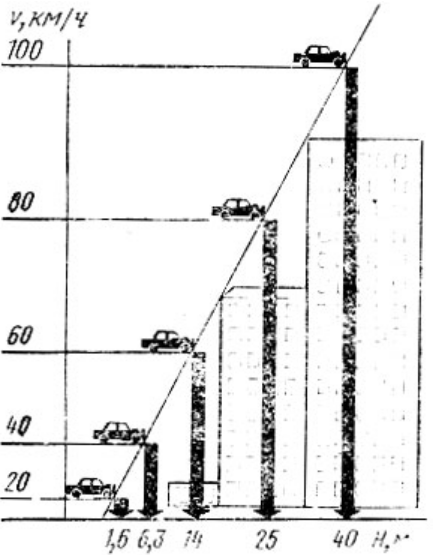 Рисунок 3.2. Схема соответствия тяжести последствий при лобовом наезде автомобиля с различной скоростью (v) на препятствие падению человека с различной высоты (Н) Причиной травматизма при ДТП является большая кинетическая энергия, накопленная массой человека при движении автомобиля. При его резком замедлении в результате лобового удара на скорости 55 км/ч эта энергия по своему значению соответствует падению с высоты 10 м и составляет 75 Дж при массе человека 75 кг. Чем меньше путь торможения, тем больше будет тормозящая сила, которая на пути 1; 0,1 и 0,01 м составит соответственно 7,5; 75 и 750 кН. Если человек будет падать с высоты 10 м на асфальт, то он получит серьезные травмы, которые могут вызвать даже смертельный исход; при падении на цветочную клумбу тяжесть его травм будет гораздо ниже, а в случае падения на спасательный пожарный брезент человек вообще избежит травм. Приведенный пример позволяет судить об эффективности ремня безопасности. Благодаря упругим деформациям передней части кузова тормозной путь, совершаемый человеком, который закреплен ремнями безопасности, может достигать 1 м. Причем амортизация самого ремня еще больше снижает действие тормозной силы. Когда водитель (пассажир) надежно закреплен на сиденье ремнями безопасности, они удерживают его тело от опасных перемещений после фронтального удара и остановки автомобиля, тем самым снижая действие перегрузок до минимума. На рис. 3.3 схематично показаны последовательно фазы перемещения человека в результате применения различных удерживающих систем. Поясной ремень безопасности (см. рис. 3.3, а) позволяет достаточно надежно фиксировать таз человека, но при этом незакрепленная верхняя часть тела под действием сил инерции наклоняется к коленям, вызывая резкий кивок головы. Применение диагонального ремня безопасности (см. рис. 3.3, б) в сочетании с амортизирующим надколенником дает несколько большую свободу перемещения нижней части тела, но исключает резкий наклон головы к коленям. И, наконец, использование воздушной подушки (см. рис. 3.3, в) исключает наклон головы и верхней части туловища к ногам, однако достаточно большое перемещение нижней части тела вперед может привести к опасному ее контакту с деталями внутреннего оборудования кузова.  Рисунок 3.3. Фазы (0 - 3) перемещения человека при фронтальном столкновении в случае применения: а - поясного ремня безопасности; б - диагонального ремня в сочетании с амортизирующим надколенником; в - надувной подушки С увеличением скорости при фронтальных столкновениях наблюдается возрастание и тяжести последствий ДТП. Так, у пассажиров уже при скорости 20 км/ч отмечаются менее тяжкие и тяжкие травмы, число которых резко возрастает с увеличением скорости до 80 - 90 км/ч, а при ее дальнейшем увеличении растет число смертельных травм. У водителей тяжесть травмирования несколько ниже, чем у пассажиров передних сидений. Это объясняется тем, что водители в процессе управления автомобилем следят за дорожной ситуацией, как правило, предвидят неизбежность столкновения и более готовы к восприятию нагрузок, возникающих в результате удара автомобиля о препятствие: прижимаются грудью к рулевому колесу, поворотом руля непроизвольно стараются подставить под удар более отдаленную от себя правую переднюю часть автомобиля и т. п. Кроме того, водитель в некоторой степени защищен рулевым колесом при невысоких скоростях столкновения от значительных по величине перемещений внутри кузова. Но и у водителей, начиная со скорости 90 км/ч, число смертельных травм растет довольно быстро. При высоких скоростях движения автомобиля возможен также третичный удар, т.е. удар внутренних органов человека (мозговой массы, печени, сердца, легких) о твердые части скелета. Возникающие при этом перегрузки могут привести к серьезным повреждениям внутренних органов, разрушению кровеносных сосудов и нервных волокон. Однако наибольшую часть травм водитель и пассажиры получают во время вторичного удара. При опрокидывании автомобиля удары человека, не закрепленного на сиденье ремнями безопасности, о детали внутреннего оборудования еще более сильны и продолжительны, так как сам процесс опрокидывания длится значительно дольше, чем удар. В случае же открывания дверей при опрокидывании люди могут выпасть из автомобиля и оказаться под транспортным средством. Опасные явления могут возникать и в конечной фазе ДТП. Опасными явлениями, которые могут возникнуть в результате ДТП, следует считать пожар, заклинивание дверей, заполнение водой салона автомобиля, если он затонул. После возникновения ДТП в результате нарушения герметичности топливной аппаратуры и соприкосновения паров топлива с нагретыми деталями автомобиля или электрической искрой может начаться пожар. Водитель и пассажиры не всегда могут быстро покинуть горящий автомобиль из-за заклинивания дверей или полученных травм. Пребывание в горящем автомобиле более 1,5 мин является для человека практически смертельным. Несмотря на то, что пожар при ДТП возникает сравнительно редко (по статистическим данным различных стран, число ДТП с пожаром составляет 0,03-1,2%), он представляет собой серьезную опасность. Заклинивание дверей, происходящее достаточно часто при ДТП, препятствует быстрой эвакуации пассажиров и водителя из автомобиля, что особенно опасно в случае получения водителем и пассажирами серьезных повреждений или возникновения пожара. При быстром проникновении воды внутрь автомобиля в случае попадания его в водоем водитель и пассажиры при ДТП не сразу приходят в себя и им нужно время для осмысления возникшей ситуации и принятия мер для того, чтобы покинуть затопленный автомобиль. Список использованной литературы Афанасьев Л.Л., Илларионов В.А., Дьяков А.Б. Конструктивная безопасность автомобиля. - М.: Машиностроение, 1983.-215 с. Безопасность транспортных средств (автомобилей) / В.А. Гудков, Ю.Я. Комаров, А.И. Рябчинский, В.Н. Федотов. Учебное пособие для вузов. - М.: Горячая линия-Телеком,2010.-431с.:ил. Рябчинский, А.И. Динамика автомобиля и безопасность дорожного движения : учеб. пособие / А.И. Рябчинский, А.А. Токарев, В.З. Русаков. - М.: МАДИ - (ГТУ). 2002. - 131 с. Яхьяев, Н.Я. Безопасность транспортных средств / Н.Я. Яхьяев. -М.: Академия, 2011. - 432 с. Правила дорожного движения Республики Казахстан: Юрист, Алматы, 2018. -73с; |