Раздел 2. Робототехника. Лабиринты и кегль-ринг
|
Школа: Частная школа «Тагылым»
|
Дата:
|
ФИО учителя: Апуова А.К.
|
Класс: 4
|
Количество присутствующих:
|
отсутствующих:
|
Тема урока
|
Выход из лабиринта
|
Цели обучения, которые достигаются на данном уроке (ссылка на учебную программу)
|
4.5.1.2 использовать датчик ультразвука
|
Цели урока
|
- использовать датчик ультразвука для определения расстояния
|
Воспитательная цель
|
- воспитание аккуратности и внимательности при выполнении работ с применением ПК, формирование у учеников навыков самоконтроля.
|
Критерии оценивания
|
Критерий
|
Уровень мыслительных навыков
|
Дескрипторы
Учащийся:
|
использовать
ультразвуковой датчик для
определения расстояния до
объекта
|
знание, понимание
|
объясняет использование
ультразвукового датчика для
определения расстояния до
объекта
|
|
Языковые цели
|
Языковые цели:
- приводить примеры использования датчиков цвета и ультразвука;
- объяснять назначение датчиков цвета и ультразвука.
Предметная лексика и терминология:
датчик цвета, программируемый модуль, ультразвуковой датчик, моторы, расстояние, ожидание, сравнение, вперед, назад, повороты, скорость, алгоритм, тест, порты ввода, порты вывода
Полезные выражения для диалога/письма:
Устройства для определения цвета позволяют … Устройства для определения расстояния бывают … Программные блоки для создания движения робота являются … При помощи программы для создания движения робота можно …
|
Привитие ценностей
|
Привитие ценностей уважения, сотрудничества и открытости осуществляется через групповую работу и коллективное обсуждение. Формирование у учащихся прочных знаний о важности требований эргономики при работе с современными средствами вычислительной техники. Научить учащихся не только эффективно использовать средства ИКТ, но и добросовестного исполнения обязанностей, стремление к достижению высоких результатов с опорой на здоровьесберегающие технологии.
|
Межпредметные связи
|
Математика.
|
Предварительные знания
|
Учащиеся умеют запускать программу, собирать базовую модель образовательного робота, управлять движением робота, устройствами
ввода и вывода, датчика касания, моторов и знают их назначение, умеют открывать, редактировать, сохранять файлы. Знакомы с
интерфейсом и основными возможностями приложения для разработки программ для робота.
|
Ход урока:
|
Заплани-рованные этапы урока
|
Запланированная деятельность на уроке
|
Ресурсы
|
Начало урока
0-3 мин
|
Психологический настрой на урок игра «Пожелание». Учащиеся становятся в круг, кидают друг другу мяч и высказывают хорошее пожелание на урок.
|
|
4-5 мин
|
Задание на концентрацию внимания «Найти отличия в изображениях».
|
Презентация
|
6-10 мин
|
Формулировка темы и цели урока.
Чтобы подвести учащихся к формулированию темы и целей урока, учитель организует игру, в ходе которой ученики получают начальное представление о том, как робот может выбирать маршрут движения.
(К) Игра «Лабиринт». Все учащиеся выстраиваются, образуя «лабиринт». Один ученик выступает в роли робота. Он должен с закрытыми глазами пройти по «лабиринту».
После игры предлагаются вопросы для обсуждения ситуации:
Как «робот» находил путь в «лабиринте»?
Действия «робота» при обнаружении препятствия.
От чего зависит время движения?
От чего будет зависеть эффективность алгоритма движения «робота»?
Учащиеся формулирует тему и цели урока, которые представлены на слайде.
|
Презентация
|
Середина урока
11-20 мин
|
(Д) Учитель демонстрирует видеоролик о движении робота по лабиринту.
Лабиринт – это структура взаимосвязанных путей.
Цель движения по лабиринту – найти дорогу от входа к выходу.
(О) Учитель объясняет алгоритм движения робота по лабиринту.
Для того, чтобы понять, как запрограммировать робота, для перемещения его по лабиринту, рекомендуется поставить себя на место робота и думать, а как бы вы начали действовать...
Учитель: Итак, вы оказались в лабиринте...

|

|
На самом деле, если вы робот, то лабиринт для вас будет выглядеть вот так.

Робот ничего не видите. У него нет глаз.
Что будет делать человек в таком случае? Идти вперед выставив руки перед собой. Наиболее разумной идеей было бы попытаться найти опору в виде стены для какой-либо руки. Допустим, правой. Как только стена обнаружена, вы в вправе двигаться вперед или назад. Стена в таком случае будет являться вашим путеводителем, опорой в этом "темном" мире.
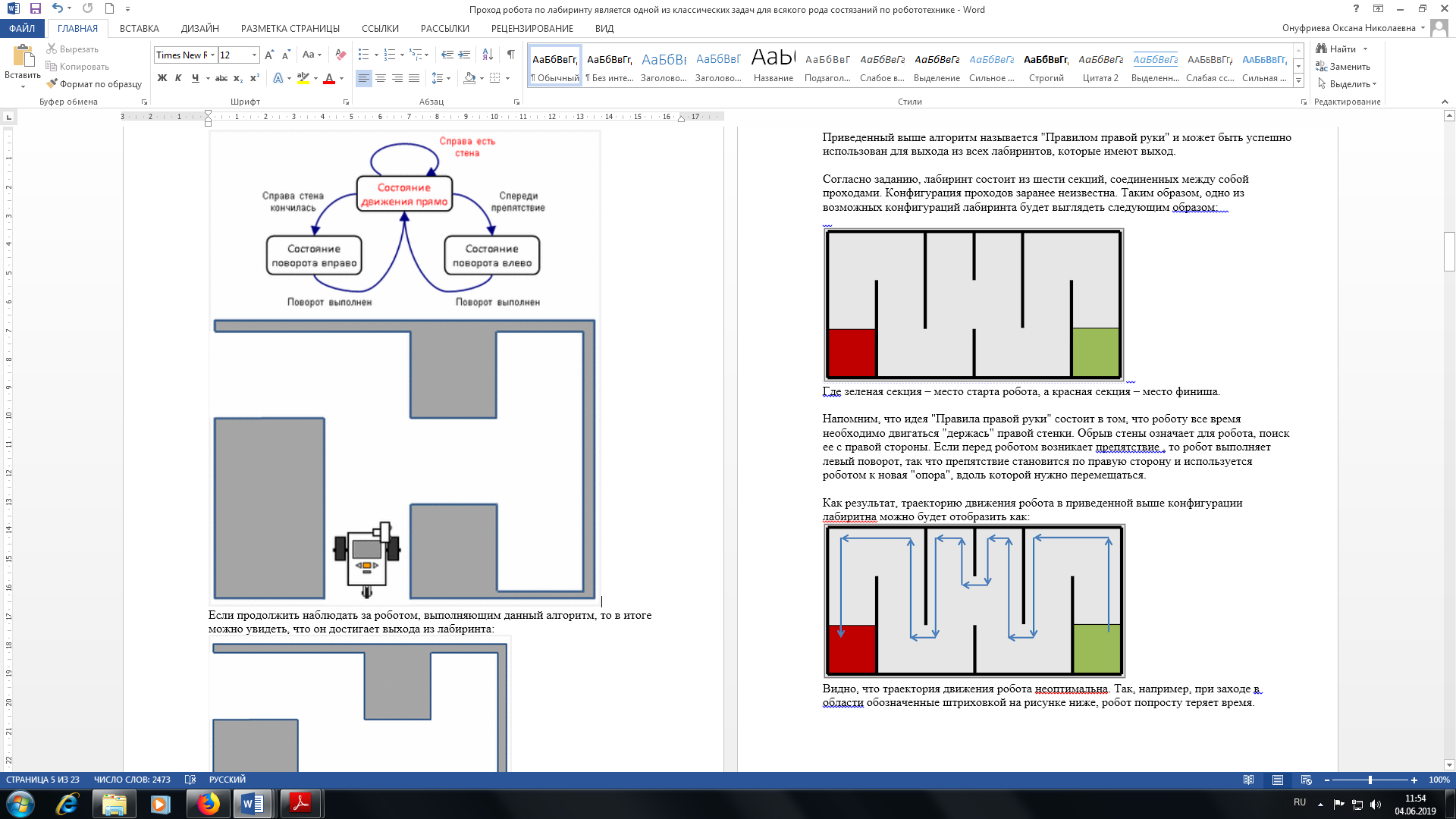
В итоге получается следующее правило обхода лабиринта: двигаемся прямо, пока под нашей рукой чувствуется стена, как только стена обрывается поворачиваемся направо, чтобы найти ее и двигаемся снова вдоль стены, если же другой рукой мы ощутили стену спереди, то поворачиваемся налево и используем уже эту стену для движения вдоль нее.
Приведенный выше алгоритм называется "Правилом правой руки" и может быть успешно использован для выхода из всех лабиринтов, которые имеют выход.
У робота такой рукой могут быть сенсоры расстояния, касания или даже освещенности. Если робот использует сенсор касания, то во время движения в момент, когда стена потеряется, он выдаст сигнал, который будет служить для робота поводом изменить свое поведение.

Когда робот «видит» стену – он движется. Когда стена обрывается, значит, лабиринт в этом месте имеет поворот. Робот должен сделать поворот.
Если робот дойдет до стены, то реакцией на столкновение со стеной будет поворот к ней боком, после чего уже эта стена будет использована как "опорная". Движение продолжится вдоль нее.
Схематично движение можно представить так:

Если продолжить наблюдать за роботом, выполняющим данный алгоритм, то в итоге можно увидеть, что он достигает выхода из лабиринта:
|
Презентация
Видео-ресурсы:
https://www.youtube.com/watch?v=2Pz0XcT75O4
Интернет-ресурсы:
https://ppt-online.org/42218
http://nnxt.blogspot.com/2011/02/i.html
Интернет-
ресурсы:
https://mosmetod.ru/metodicheskoe-prostranstvo/robototekhnika/uchebno-metodicheskie-materialy/robokontroller/prokhozhdenie-labirinta-pravilo-pravoj-ruki.html
|
21-22 мин
|
Физминутка.
Учащиеся под музыкальное сопровождение на слайде выполняют упражнения.
Можно выбрать одного ученика, который будет показывать движения.
|
Видеоресуры:
https://yandex.kz/video/search?text=%D1%84%D0%B8%D0%B7%D0%BC%D0%B8%D0%BD%D1%83%D1%82%D0%BA%D0%B0&path=wizard&noreask=1&filmId=10446558784837143442
|
23-27 мин
|
(И) Индивидуальная работа на закрепление материала. Выполнение заданий по карточкам.
Задание №1. Заполнить таблицу.
|
Устройство
|
Название устройства
|
Назначение устройства
|
1
|

|
|
|
2
|

|
|
|
3
|

|
|
|
|
|
28-30 мин
|
(П, ФО) Взаимооценивание в парах работ по образцу
на слайде с использованием дескрипторов.
Дескрипторы.
Учащийся:
|
|
Правильно указал название и назначение первого устройства.
|
|
Правильно указал название и назначение второго устройства.
|
|
Правильно указал название и назначение третьего устройства.
|
|
|
Работы учащихся
Карточки с дескрипторами
Презентация
|
31-35 мин
|
(И) Индивидуальная работа на закрепление материала. Выполнение заданий по карточкам.
Задание №2. Записать алгоритм выхода из лабиринта, используя команды:
- шаг вперед
- шаг назад
- налево 90
- направо 90
- если препятствие
- если выход
В качестве дифференциации в данном задании предлагаются лабиринты трех уровней сложности: легкий, средний, сложный.
|
Карточки с заданиями и лабиринтами
|
36-37 мин
|
(П, ФО) Учащиеся обмениваются лабиринтами и в парах выполняют проверку составленных алгоритмов.
|
Алгоритмы учащихся
|
Конец урока
38-40 мин
|
Рефлексия «Лестница успеха».
Учащиеся отмечают смайликами уровень усвоения темы:
- знаю
- понимаю
- умею
|
Презентация, шкала для рефлексии, смайлики
|
Дифференциация – каким образом Вы планируете оказать больше поддержки? Какие задачи Вы планируете поставить перед более способными учащимися?
|
Оценивание – как Вы планируете проверить уровень усвоения материала учащимися?
|
Здоровье и соблюдение техники безопасности
|
Дифференцированные задания на этапе закрепления материала.
|
Формативное оценивание, взаимооценивание учащихся в парах по критериям.
Обратная связи после каждого этапа урока.
Рефлексия «Лестница успеха».
|
Повторение правил техники безопасности и правил эргономики.
| |
 Скачать 1.15 Mb.
Скачать 1.15 Mb.