Электротехника. Побережский И.А. 2016. Задача 1 Записать передаточную функцию и построить лах звена, принципиальная схема которого представлена на рис. 1, где
 Скачать 233.87 Kb. Скачать 233.87 Kb.
|

ПсковГУ, ФВТЭ, Кафедра ЭСА, ЭСА, 0023-02, Побережский И.А. Задача №1Записать передаточную функцию и построить ЛАХ звена, принципиальная схема которого представлена на рис.1, где 
При нахождении передаточной функции следует использовать соотношение:  где Zоc (p)- комплексное сопротивление цепи ОС; Zвх (p)- комплексное сопротивление входной цепи.    Введя обозначения  , ,  , получаем передаточную функцию вида: , получаем передаточную функцию вида:  Задача №2Записать передаточную функцию звена в общем виде для схемы включения УД, представленной на рисунке 1, при 
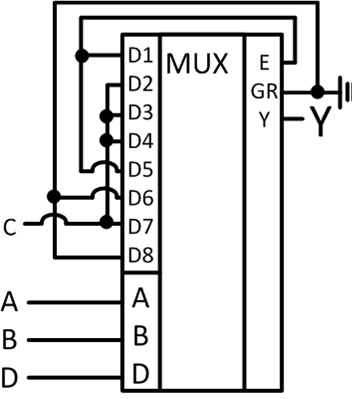
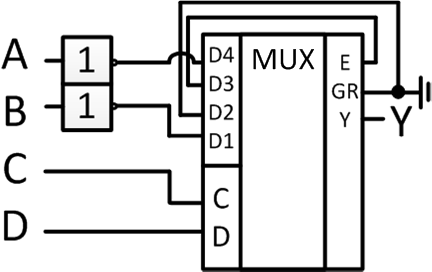
Нахождение передаточной функции осуществляется с использованием соотношения:  где Z1(p) и Z2 (p) - комплексные сопротивления соответствующих ветвей, как показано на рисунке 1.   Введя следующие обозначения:  ; ;  ; ;  , получим , получим Передаточная функция соответствует ПИД-регулятору. ПсковГУ, ФВТиЭ, Кафедра ЭСА, ЭСА, 0023-02, Побережский И.А. Задача №1Для заданной функции алгебры логики 4 входных переменных составить схемы реализации на мультиплексорах 8 – 1 ; 4 – 1, и элементах И, ИЛИ, НЕ.  Составим таблицу истинности:
На основе таблицы истинности, построим карту Карно и упростим, и используя базисы, реализуем функцию:   
d b 
Задача №5Импульсный датчик скорости используется для определения скорости вращения двигателя постоянного тока по методу прямой функции (ЦИС-1 рода). Определить точность измерения скорости на нижней и верхней скорости вращения. Сделать вывод о целесообразности использования данного датчика, если известно, что погрешность измерения скорости на всем диапазоне D не должна превышать 5%. При невыполнении условия осуществить выбор датчика с нужным количеством меток на оборот Z. Произвести оценку точности измерения скорости при применении метода обратной функции для ЦИС- 2 рода при заданной частоте внешнего генератора. При условиях:  -шаг -шаг Решение:Для метода прямой функции за фиксированный интервал времени t и подсчитывается число импульсов с датчика. При этом число подсчитанных импульсов определяется как:  где Z - число импульсов на оборот датчика, n - частота вращения вала в об/сек. Погрешность измерения скорости:  Определим   Тогда примем z = 1024   При использовании метода обратной функции осуществляется подсчет импульсов генератора высокой частоты между двумя импульсами синхронизации, поступаемых с импульсного датчика скорости. При этом число подсчитанных импульсов обратно пропорционально измеряемой скорости вращения двигателя:  Задача №6Определить требуемую величину разрядности кодового датчика положения позиционного типа для измерения перемещения вращающегося шагового двигателя, имеющего целый шаг n = 4 и работающего с коэффициентом электрического дробления шага равным Кдр = 16. Погрешность измерения не должна превышать половины дробного шага. Решение: Разрядность кодового датчика k определяется по формуле:  где D – диапазон перемещения,  – требуемая точность измерения. – требуемая точность измерения.Определим угол одного шага:  Необходимая точность определена как:  Так как в условии задачи речь идет о вращении, то D = 360  : : Ответ: величину разрядности кодового датчика необходимо принять равной 12. Задача №7Кодовый датчик вращающегося типа с n-разрядами двоичного позиционного кода с начальной позиции Nн = 0011010110 переместился в конечную Nк = 1100101010. Шаг двигателя n = 4, разрядность датчика k = 10, коэффициент электрического дробления шага Кдр = 16. Какое расстояние пройдено шаговым двигателем и сколько он сделал шагов? Решение: Определим разрешающую способность  : : Переведем код из двоичной с.с. в десятичную: Nн =0011010110 = 214 Nк =1100101010 = 810 Разница:  Пройденный путь:   Число шагов, сделанных двигателем:  Ответ: Пройденный путь  , Число шагов, сделанных двигателем , Число шагов, сделанных двигателем  ПсковГУ, ФВТиЭ, Кафедра ЭСА, ЭСА, 0023-02, Побережский И.А. Вариант №6 Задача №9Рассчитать параметры тахометрического моста   если известно, что сопротивление добавочных полюсов двигателя составляет 20% от Rя двигателя. Представить передаточную функцию моста, если емкость, установленная на выходе моста, равна 0,05 мкФ. Двигатель: ПБСТ-52, если известно, что сопротивление добавочных полюсов двигателя составляет 20% от Rя двигателя. Представить передаточную функцию моста, если емкость, установленная на выходе моста, равна 0,05 мкФ. Двигатель: ПБСТ-52,   Решение: Так как сопротивление добавочных полюсов двигателя составляет 20% от Rя двигателя, справедлива следующая цепь упрощений:  Примем  тогда постоянная времени тогда постоянная времени  равна: равна: Коэффициент  будет равен: будет равен: где где  , ,  При соответствующем выборе точки а можно добиться выполнения соотношения:  Выходное напряжение определим по формуле:  Передаточную функцию тахометрического моста можно представить в виде инерционного звена первого порядка:  |

 1
1