Параллельная работа синхронных генераторов
 Скачать 3.19 Mb. Скачать 3.19 Mb.
|

|
§ 9.5. Электродвижущие силы и токи в обмотках статора и ротора при вращающемся роторе. При вращении ротора э. д. с. и токи в роторе будут изменяться в зависимости от величины скольжения. В неподвижном роторе э. д. с. Во вращающемся роторе э. д. с Частота тока в роторе уменьшается по мере роста скорости вращения ротора, так как f2=f2(n1-n2)/n2,и э. д. с, наводимая в обмотке ротора при холостом ходе, может быть весьма мала, всего (0,03÷0,05) Ez. Т Реактивное сопротивление обмотки вращающегося ротора По закону Ома ток в неподвижном роторе Соответственно во вращающемся роторе  или Ток обмотки ротора I2 создает магнитный поток Ф2, который вращается относительно ротора со скоростью п'1= п1—п2. Скорость вращения самого ротора равна п2, тогда скорость вращения поля ротора в пространстве, т. е. относительно неподвижного ротора, ппр =п'2 + п2 = п1 - п2 + п2=п1 Таким образом, поле ротора вращается в пространстве с той же скоростью и в ту же сторону, что и поле статора, и образует с ним общее результирующее поле. Благодаря этому, независимо от скорости вращения ротора, м. д. с. статора и ротора геометрически складываются, образуя полезный магнитный поток, т. е. где м.д.с. статора при холостом ходе. Аналогично трансформатору с помощью приведенных величин Е'2, I'2, r'2и x'2 для асинхронного двигателя можно построить векторную диаграмму (рис. 9.5, а) и схему замещения (рис. 9.5, б). Эта схема не вполне аналогична схеме замещения трансформатора, изображенной на рис. 8.8. Нетрудно видеть, что на этом рисунке r'2=const, в то время как приведенное активное сопротивление обмотки ротора r'2 делится на переменную величину s, следовательно, и r2 /s будет переменной величиной. Чтобы схема замещения стала вполне аналогичной схеме замещения трансформатора, произведем несложное преобразование. Заменим величину r’2/s суммой двух величин 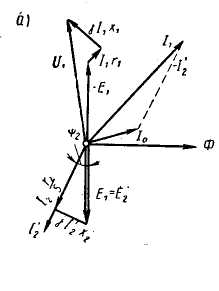  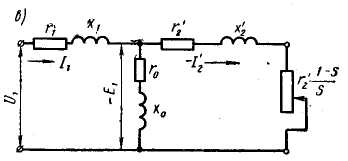 Рис. 9.5. Векторная диаграмма и схема замещения асинхронного двигателя Тогда схема замещения будет соответствовать схеме замещения трансформатора, вторичная обмотка которого нагружена на сопротивление r’2(1-s/s) (рис.,9.5, в); r’2является постоянным по величине активным сопротивлением обмотки ротора Величина r’2(1-s/s) соответствует той части мощности, которая преобразуется в механическую. § 9.6. Потери и коэффициент полезного действия асинхронных двигателей Электрическая мощность, подводимая к обмотке статора двигателя, преобразуется в механическую мощность на его валу. Электрическая мощность больше механической на величину потерь. На рис. 9.6 приведена энергетическая диаграмма асинхронного двигателя. В асинхронных двигателях имеют место: потери на нагрев обмоток статора и ротора (потери в меди) РM; потери магнитные на гистерезис и вихревые токи (потери в стали) РCТ и механические потери на трение Рмех. Величина потерь в меди: для статора д Для трехфазного двигателя с контактными кольцами число фаз m1=m2=3, для трехфазного двигателя с короткозамкнутым ротором m2=Z2 . При расчете потерь следует иметь ввиду, что активное сопротивление обмоток статора двигателей переменного тока несколько больше их омического сопротивления вследствие наличия поверхностного эффекта. 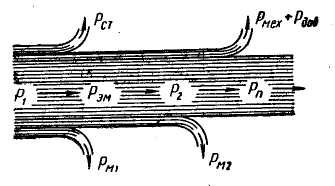 Рис 9.6. Энергетическая диаграмма асинхронного двигателя Это увеличение сопротивления при стандартной частоте тока 50 гц может быть учтено коэффициентом, равным в среднем 1.1-1.2. Сопротивление обмотки ротора близко к его омическому сопротивлению, так как частота тока в роторе при номинальном режиме работы очень незначительна (f2=f1S). Магнитные потери в стали ротора можно не учитывать ввиду их небольшой велечины. Механические потери складываются из потерь на трение вращающихся частей машины о воздух, на трение в подшипниках и вентиляционных потерь. У двигателей с контактными кольцами прибавляются еще потери на трение щеток о контактные кольца. Мощность, подводимая к трехфазному двигателю, где U1и I1 — фазные напряжение и ток статора. Мощность, передаваемая ротору посредством вращающегося магнитного поля, является электромагнитной мощностью; Эта мощность может быть представлена как произведение вращающегося момента электромагнитных сил на угловую скорость, т. е. М еханическая мощность на валу ротора, т. е. полезная мощность Двигателя, если пренебречь механическими потерями Рыех, которые в сравнении с другими потерями малы, так как n2=n1(1-s) Разность между Рэм и P2 представляет собой потери в обмотке ротора (потери в меди): Отсюда следует, что скольжение ротора пропорционально потерям в его обмотке и является мерой этих потерь. Потери в стали и механические потери почти не зависят от нагрузки (постоянные потери); они могут быть определены на основании опыта холостого хода. Потери в обмотках ротора и статора зависят от нагрузки (переменные потери). Они определяются на основании опыта короткого замыкания (см. § 9.9). По отношению к номинальной мощности эти потери составляют примерно от 7 до 2,5%. Механические потери и потери в стали в значительной степени зависят от числа полюсов двигателя и его мощности. Ниже, в табл. 9.1 приведены некоторые значения (в процентах к номинальной мощности) постоянных потерь в зависимости от нагрузки для асинхронных двигателей типа А и А2. 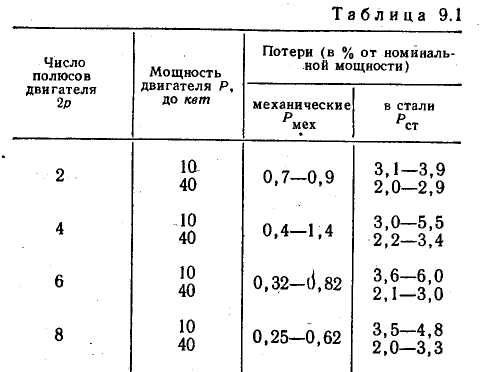 В асинхронных машинах имеются также и добавочные потери. По ГОСТ 183-55 для этого типа машин добавочные потери принимаются равными 0,5% номинальной мощности. Таким образом, суммарные потери асинхронных двигателей К и § 9.7. Электромагнитный момент асинхронного двигателя Электромагнитный момент асинхронного двигателя создается в результате взаимодействия тока в обмотке ротора с вращающимся магнитным полем статора. Величина в Здесь или подставляя значение В  Таким образом, вращающий момент двигателя пропорционален электрическим потерям в роторе.  Приведенный ток в роторе Приведенный ток в ротореПодставляя это значение тока в уравнение момента, получаем  Если, в уравнении вращающего момента (х1+х2') выразить через х и умножить числитель и знаменатель на s2, то  П  ри небольших значениях скольжения, в пределах 1,5% его номинального значения, величинами r1sи x2s2можно пренебречь. Тогда. пологая получим ри небольших значениях скольжения, в пределах 1,5% его номинального значения, величинами r1sи x2s2можно пренебречь. Тогда. пологая получимТаким образом в пределах до номинальной нагрузки момент двигателя прямо пропорционален скольжению. С увеличением скольжения момент растет, но лишь до определенного максимального значения ММАКС, соответствующего некоторому значению SКР= =0,12 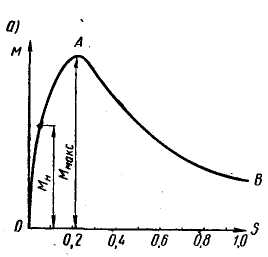 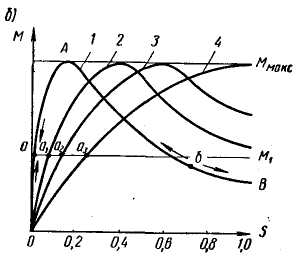 Рис. 9.7. Кривые зависимости M=f(s) На основании выражения (9.8) строим график зависимости электромагнитного момента машины от скольжения при постоянном подведенном напряжении U1=constи частоте тока ft=const(рис. 9.7, а). Эта зависимость называется механической характеристикой двигателя. Параметры m1r1r’2x2и х’2, входящие в уравнение (9.8), являются величинами, постоянными для данной машины, так как они задаются конструкцией двигателя. В момент пуска двигателя n2=0 и s=l. Под действием начального пускового момента, если он достаточен для преодоления статического момента, ротор двигателя начинает вращаться, и скорость его будет увеличиваться до тех пор, пока вращающий момент не уравняется со статическим. По мере разгона двигателя скольжение уменьшается. С уменьшением sодновременно увеличивается как числитель, так и знаменатель, но вначале числитель растет в большей степени, чем знаменатель, поэтому момент увеличивается. При критическом значении скольжения вращающий момент достигает наибольшего значения Mмакс. В дальнейшем начинает сказываться преобладающее значение знаменателя, куда r2/xвходит в квадрате, и момент постепенно уменьшается и при s=0 станет равным нулю. Механическую характеристику можно разделить на два участка- устойчивой (ОА) и неустойчивой (АВ) работы. Если считать, что противодействующий момент механизма, приводимого в действие данным двигателем, не зависит от скорости вращения, т. е. MCT=const, то зависимость MCT=f(s) будет выражаться прямой, параллельной оси абсцисс. Предположим, что при данном моменте M1 устойчивая работа двигателя (M1=M0+M2=Мст) определяется точкой а на кривой 1 (рис. 9.7, б). Если по какой-либо причине момент М1окажется больше момента МСТ, скорость вращения двигателя уменьшится (скольжение увеличится), и устойчивый режим двигателя восстановится в той же точке а , но уже при меньшей скорости вращения. Если же нарушение устойчивого режима двигателя произойдет в точке б, то при MCT>М1 скорость вращения двигателя будет снижаться до полной остановки последнего. При MCТ<М1, наоборот, скорость двигателя увеличится до значения, при котором двигатель войдет вобласть устойчивой работы, определяемой для данного случая точкой а. Подставляя значение sKp в выражение момента (9.8), получаем уравнение максимального вращающего момента  Ввиду того, что в формуле (9.11) r1весьма мало по сравнению с х, то можно записать Выражения (9.10) и (9.11) дают возможность сделать выводы: а) чем больше r’2/x тем большее скольжение будет соответствовать максимальному вращающему моменту; б) максимальное значение момента не зависит от активного сопротивления ротора r’2; в) максимальное значение момента пропорционально квадрату напряжения, подводимого к статору (ММАКС Отсюда следует, что если у асинхронного двигателя увеличивать активное сопротивление ротора r2', то максимальный момент, сохраняя свое значение, будет смещаться в сторону больших скольжений (рис. 9.7, б, кривые 2, 3 и 4). Ток ротора I’2, как известно, вследствие индуктивности обмотки ротора, отстает по фазе от э. д. с. Е2на некоторый угол где Н Дробь является постоянной величиной, обозначим ее через kM, тогда Таким образом, выражение момента асинхронного двигателя отличается от выражения момента машин постоянного тока множителем Т В начальный момент пуска асинхронного двигателя при неподвижном еще роторе относительная скорость вращающегося магнитного поля и индуктивное сопротивление х будут максимальны, а С В момент пуска добавочное сопротивление реостата позволяет получить максимальный момент при s=l, т. е. получить Мпуск = MМАКС Кривые зависимости M=f(s) для. разных значений Д Как отмечалось, максимальный вращающий момент асинхронных двигателей пропорционален квадрату напряжения. Поэтому при снижении напряжения, например, на 30%, т. е. при U1= =0,7UH момент М 'МАКС будет равен всего 0,72ММАКС и может оказаться меньше номинального. В этом случае работа двигателя с номинальной нагрузкой уже невозможна. |