Параллельная работа синхронных генераторов
 Скачать 3.19 Mb. Скачать 3.19 Mb.
|

|
§ 9.10. Пуск асинхронных двигателей Пусковой режим асинхронных двигателей характеризуется двумя величинами: кратностью пускового момента Mпуск/MH и кратностью пускового тока Iпуск/IH Кратность пускового тока должна быть наименьшей, кратность пускового момента — наибольшей. У современных двигателей с короткозамкнутым ротором кратность пускового момента составляет 0,7—1,5, а кратность пускового тока 4—7,5. При пуске двигатель должен развивать вращающий момент, способный преодолеть противодействующий момент на его валу. Большое значение для условий пуска двигателей имеет кратность пускового тока. В начальный момент пуска двигателя относительная скорость магнитного потока, пересекающего обмотку неподвижного ротора, имеет наибольшую величину, так как скольжение s=l. Наводимая в обмотке ротора э. д. с. Егбудет иметь величину, во много раз превышающую номинальное ее значение при работе двигателя (E2S= E2S). Соответственно и ток, создаваемый этой э. д. с. в роторе, будет превосходить в несколько раз рабочий ток ротора I2. Для уравновешивания этого тока и создаваемой им м. д. с. в первичной цепи обмотки статора появится дополнительная слагающая тока. При этом пусковой ток в обмотке статора значительно превысит номинальный ток. Так как период пуска не превышает нескольких секунд, то для сохранности самого двигателя пусковые токи статора и ротора неопасны: нагрев их обмоток не успеет достичь опасных пределов. Однако большой пусковой ток в первичной цепи может вызвать резкое падение напряжения в питающей сети, особенно если она небольшой мощности. В большинстве случаев пуск асинхронных двигателей осуществляется непосредственно включением их в сеть. Лишь в тех случаях, когда пуск двигателей сопровождается значительным падением напряжения в сети, применяют специальные способы пуска двигателей. Для двигателей с короткозамкнутым ротором и двигателей с контактными кольцами применяют различные схемы пуска. С целью ограничения пускового тока пуск асинхронных двигателей с короткозамкнутым ротором иногда производят при пониженном напряжении. Понижение напряжения может осуществляться путем включения на период пуска последовательно с обмоткой статора двигателя пусковых сопротивлений при помощи автотрансформатора и переключением обмотки статора со звезды на треугольник. Пуск двигателей с короткозамкнутым ротором с последовательным включением пусковых сопротивлений связан со значительными потерями мощности в сопротивлениях. При значительных мощностях двигателей реостаты получаются громоздкими. Поэтому этот способ пуска двигателей получил ограниченное применение (лишь для пуска двигателей малой мощности). При пуске двигателей с короткозамкнутым ротором посредством автотрансформатора (рис. 9.15) включается рубильник 1 при разомкнутом рубильнике 2, и к двигателю вначале подается пониженное напряжение. По мере увеличения скорости двигателя напряжение постепенно доводят до номинальной величины, после чего замыкается рубильник 2, и двигатель включается непосредственно в сеть, а рубильник 1 выключается. Если автотрансформатор имеет коэффициент трансформации ka, то первичные и вторичные напряжения и токи автотрансформатора будут равны: В соответствии с коэффициентом трансформации ka автотрансформатора ток I2', подводимый к двигателю, будет меньше тока при непосредственном включении двигателя в сеть в кaраз, так как напряжение U2меньше напряжения U1 в kа раз. Отсюда можно написать, что 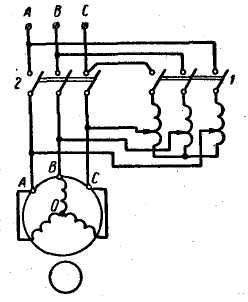 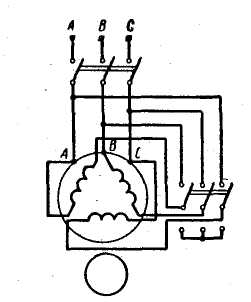 рис9.15 Схема автотрансформаторного пуска асинхронного двигателя рис9.16 Схема пуска асинхронного двигателя переключением обмотки статора со звезды на треугольник. При пуске посредством автотрансформатора ток, подводимый к двигателю из сети, уменьшается в Пуск двигателя переключением обмотки статора со звезды на треугольник (рис. 9.16) возможен лишь в том случае, если обмотка статора двигателя при работе соединена в треугольник. Как известно, фазные и линейные напряжения и токи при соединения обмоток в звезду связаны между собой отношениями  Из отношения токов получим Из отношения токов получимТаким образом, при соединении обмоток в звезду линейный ток в три раза меньше линейного тока при их соединении в треугольник. Точно так же и пусковой вращающийся момент при соединении обмоток в звезду будет меньше пускового вращающегося момента при их соединении в треугольник в три раза. 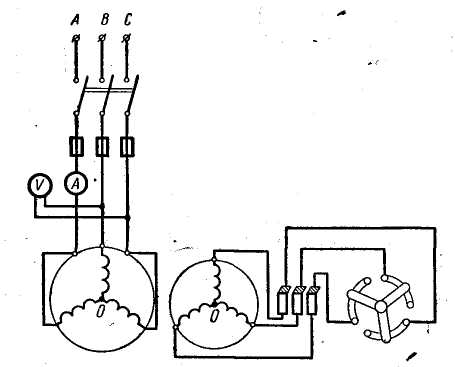 Рис. 9.17. Пуск асинхронного двигателя с контактными кольцами В тех случаях, когда необходимо сохранить при пуске большой пусковой вращающий момент, а также при большой частоте пусков и остановок двигателя применяют асинхронные двигатели с контактными кольцами. Их пуск осуществляют при помощи пускового реостата, включенного последовательно с обмоткой ротора (рис. 9.17). Этим достигается увеличение активного сопротивления цепи ротора, что приводит, с одной стороны, к уменьшению пускового тока до 1,5—2,5-кратной величины, а с другой стороны — к увеличению активной составляющей тока ротора Процесс пуска асинхронного двигателя с контактными кольцами показан на диаграмме, приведенной на рис. 9.18. На диаграмме даны четыре кривые зависимости пускового момента от скольжения, которые соответствуют четырем фиксированным положениям пускового реостата. В начальный момент пуска, когда пусковой реостат введен & цепь ротора двигателя полностью, начальный пусковой момент будет Рис. 9.18. Диаграмма изменения вращающего момента в период пуска асинхронного двигателя с контактными кольцами 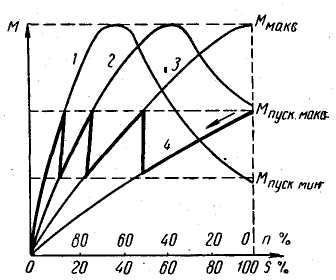 равен MПУСК.МАКС По мере увеличения скорости двигателя пусковой момент будет изменяться по кривой 4 до тех пор, пока не достигнет значения МПУСК.МИН. При выключении первой секции пускового реостата момент вновь возрастает до начальной величины МПУСК.МАКС и по мере сильнейшего увеличения скорости вращения ротора будет изменяться уже по кривой 3. Когда будет выключена вторая секция пускового реостата, момент опять возрастает и станет изменяться по кривой 2. Наконец, при полностью выведенном из цепи ротора реостата, после нового его увеличения до максимальной величины, соответствующей режиму пуска, будет меняться по кривой 1 до тех пор, пока он не уравняется с моментом нагрузки. После этого величина скольжения и число оборотов установятся постоянными. § 9.11. Регулирование скорости вращения асинхронных двигателей и изменение направления вращения ротора Из уравнения скорости вращения асинхронного двигателя следует, что изменение скорости возможно путем изменения величины скольжения, изменения частоты и числа пар полюсов. У асинхронных двигателей с контактными кольцами можно изменять скорость вращения реостатом в цепи ротора. Частота промышленных сетей постоянна и равна 50 гц, поэтому для изменения частоты сети необходимо применять специальный преобразователь частоты. Таким образом, этот способ регулировки применим только в автономных установках, например в гребных судовых установках где генератор связан с гребным двигателем непосредственно электрическим валом. В этом случае изменение частоты синхронного генератора производится регулировкой скорости первичного двигателя. Регулировка скорости двигателя-исполнителя частоты тока возможна только в ограниченных пределах. Надо иметь в виду, что при изменении частоты будет меняться также в общем случае напряжение на зажимах, поток, ток холостого хода, момент, мощность и т.д. Регулировка скорости вращения при помощи регулировочного реостата у асинхронного двигателя с контактными кольцами основана на увеличении активного сопротивления цепи ротора, что приводит к увеличению скольжения и, следовательно, уменьшению скорости вращения (рис. 9.18, кривые 2, 3 и 4). Дополнительное активное сопротивление в цепи ротора вызывает уменьшение тока I2 и соответственно уменьшение вращающего момента М. Скорость вращения двигателя начинает падать, а скольжение увеличивается. В то же время э.д.с. E2S=Е'2S возрастает, что приводит к увеличению тока I2' до его прежней величины. Момент М уравнивается со статическим моментом МCТ, уменьшение скорости прекращается, и двигатель начинает вращаться с постоянной скоростью, несколько меньшей, чем начальная. Основным недостатком этого способа регулирования скорости вращения асинхронного двигателя является уменьшение к. п. д. двигателя пропорционально уменьшению скорости. При незначительных нагрузках, когда момент двигателя близок к моменту холостого хода, пределы регулирования скорости вращения ограничены. Этот способ также мало экономичен, так как связан со значительным увеличением потерь в роторной цепи. Реостат должен быть рассчитан на полный рабочий ток и поэтому иметь значительные габариты и массу. У двигателей с короткозамкнутым ротором наиболее распространен способ регулирования скорости изменением числа пар полюсов обмотки статора. При этом способе регулирования скорости вращения можно получить только ступенчатое изменение синхронной скорости, например две ступени с отношением скоростей 2:1. Промышленностью изготовляются двигатели двух- трех- и четырехскоростные. Для получения различного числа пар полюсов у вращающегося магнитного поля каждая фазная обмотка двигателя подразделяется на две одинаковые части — полуобмотки. При различном соединении полуобмоток между собой, параллельно или последовательно, в них меняется направление токов, а значит и создаваемых ими магнитных полей. На рис. 9.19 показаны схемы соединения полуобмоток одной фазы, при котором число полюсов вращающегося поля машины изменяется в отношении 2:1. Как видно из схемы, при последовательном согласном соединении секций обмоток фаз число полюсов вдвое больше, чем при параллельном или последовательном встречном их соединении. 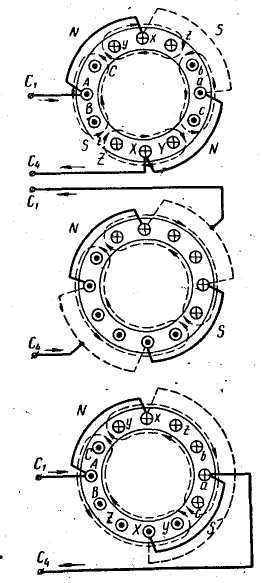 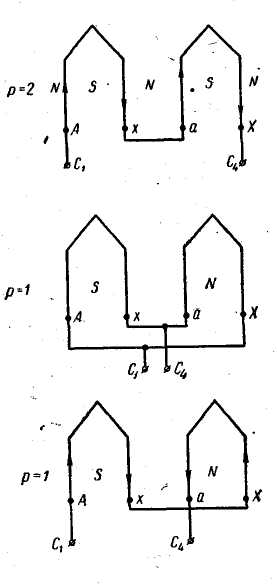 Рис. 9.19. Схема переключения обмотки статора на четыре и на два полюса Соединительные проводники с передней стороны машины показаны сплошными линиями, а с задней стороны — штриховыми. Потоки в магнитной цепи также показаны штриховыми линиями. Таким образом, при последовательном согласном включении ка- тушек скорость вращения магнитного поля Недостатком этого способа регулирования числа оборотов является ступенчатость изменения скоростей. Надо иметь в виду, что при постоянном моменте нагрузки на валу двигателя при переключении обмотки статора на меньшее число полюсов (параллельное соединение катушек) с увеличением скорости увеличивается и мощность двигателя, так как Н Регулирование скорости двигателей переключением числа пар полюсов возможно лишь в двигателе с короткозамкнутым ротором, так как только у этого двигателя число полюсов ротора всегда соответствует числу полюсов статора. Изменение направления вращения асинхронного двигателя (реверсирование) производится переключением любых двух линейных питающих проводов, при помощи переключателя. При таком переключении двух любых фаз изменится порядок чередования фаз, а следовательно, и направление вращения вращающегося магнитного поля. Ротор двигателя, следуя за вращающимся магнитным полем, также изменит направление своего вращения. § 9.12. Асинхронные двигатели специального назначения С целью улучшения пусковых свойств короткозамкнутые роторы асинхронных двигателей иногда выполняются с двойной беличьей клеткой или глубоким пазом. Ротор с двойной беличьей клеткой имеет две самостоятельные короткозамкнутые обмотки (беличьи клетки): внешнюю 1 — пусковую — с большим активным и малым индуктивным сопротивлениями и внутреннюю 2 — рабочую — с малым активным и большим индуктивным сопротивлениями (рис. 9.20, а). Индуктивное сопротивление рабочей обмотки особенно велико при пуске, когда частота тока в роторе близка к частоте сети. Первая обмотка является пусковой, вторая — рабочей. В начале пуска, когда величина скольжения близка к единице, частота тока в роторе близка к частоте сети. Поэтому и индуктивное сопротивление рабочей обмотки будет особенно велико при малом активном сопротивлении. Ток в рабочей обмотке будет сдвинут по фазе относительно наведенной в этой обмотке э. д. с. на угол, близкий к 90°, и поэтому создавать вращающего момента не будет. В то же время в пусковой обмотке при ее малом индуктивном и большом активном сопротивлениях ток практически будет совпадать по фазе с наведенной в обмотке э. д. с. и создаст большой вращающий момент М (рис. 9.20, б). По мере увеличения скорости ротора частота тока в роторе уменьшается и индуктивные сопротивления обеих 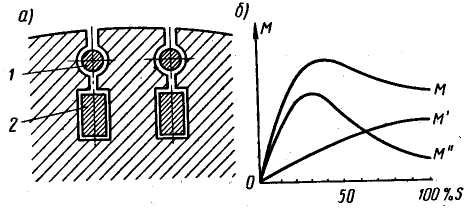 Рис.9.20. ротор с двойной беличьей клеткой. обмоток также будут уменьшаться. При номинальной скорости вращения ротора индуктивные сопротивления обмоток будут очень малы, и ток практически распределяется в обмотках о 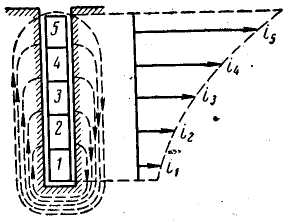 братно пропорционально их активным сопротивлениям, т. е. почти весь ток будет проходить по рабочей обмотке, братно пропорционально их активным сопротивлениям, т. е. почти весь ток будет проходить по рабочей обмотке,Рис.9.21. ротор с глубоким пазом создающей момент М. На валу машины будет создаваться суммарный момент М. Недостатки двухклеточного двигателя заключаются в несколько пониженном его Ротор с глубоким пазом (рис. 9.21) имеет обмотку, состоящую из высоких узких стержней. При пуске двигателя, когда частота тока в роторе имеет наибольшую величину, возникает явление вытеснения тока. Магнитные силовые линии потока рассеяния ФS, стремясь замкнуться по наиболее короткому пути, создают в пазу неравномерное распределение магнитного потока. В нижней части паза плотность магнитного потока рассеяния значительно больше, чем в верхней его части. Н По мере увеличения скорости вращения ротора распределение тока становится более равномерным, и активное сопротивление обмотки уменьшается. При номинальной скорости вращения частота тока в роторе мала, и двигатель практически работает как обычный асинхронный двигатель. Таким образом, у асинхронного двигателя с глубоким пазом пусковые характеристики лучше, чем у двигателя нормального исполнения, однако коэффициент мощности cosφ и перегрузочная способность этого двигателя хуже. Это объясняется относительно большим индуктивным сопротивлением его ротора. В табл. 9.3 даются пусковые характеристики асинхронных двигателей с двойной клеткой и глубоким пазом. 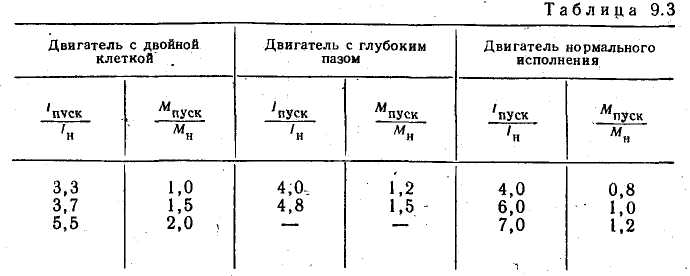 § 9.13. Асинхронные двигатели единой серии А Трехфазные асинхронные двигатели единой серии выпускаются защищенного исполнения с внутренней вентиляцией, тип А, и закрытого исполнения с наружной вентиляцией — внешним обдувом, тип АО. Стандартные значения мощностей трехфазных асинхронных двигателей единой серии типов А2 и АО2 в пределах от 0,6 до 100 квт имеют 18 ступеней; 0,6; 0,8; 1,1; 1,5; 2,2; 3,0; 4,0; 5,5; 7,5; 10,0; 13,0; 17,0; 22,0; 30,0; 40,0; 55,0; 75,0; 100,0 квт. Электродвигатели единой серии типа А2 и АО2 характеризуются повышенной эксплуатационной надежностью в связи с применением высокопрочных изоляционных материалов и лаков, а также существенным повышением их энергетических показателей (к. п. д. и cosφ) и снижением массы и габаритов. Асинхронные двигатели единой серии выполняются в следующих модификациях: с короткозамкнутым ротором для привода механизмов, не требующих специальных пусковых устройств; повышенного скольжения с повышенным моментом, к. п. д. и cosφ многоскоростные, с фазным ротором — тип АК. Двигатели с повышенным скольжением типов АС и АОС могут применяться в повторно-кратковременном режиме. Многоскоростные двигатели имеют установочные и общие размеры, одинаковые с соответствующими размерами односкоростных двигателей на 1500 об/мин того же исполнения по защите от воздействия окружающей среды. Так, размеры многоскоростного асинхронного двигателя типа А72-8/6/4 такие же, как и двигатели А72-4. Двигатели единой серии изготовляются на напряжение 220/380 и 500 в. Из стандарта исключены электродвигатели на напряжение 127 в, так как при этом напряжении получается перерасход металла в распределительных сетях. Выпускаются асинхронные трехфазные двигатели с короткозамкнутым ротором на напряжение 380 в с соединением обмоток статора в треугольник с тем, чтобы можно было осуществлять пуск этих двигателей переключением обмоток двигателей со звезды на треугольник. Асинхронные двигатели трехфазного тока с короткозамкнутым ротором изготовляются с синхронной скоростью 3000, 1500, 1000, 750 и 600 об/мин, с фазным ротором — 1500, 1000, 750 об/мин. В табл. 9.4 приведены буквенные обозначения основных типов асинхронных двигателей единой серии 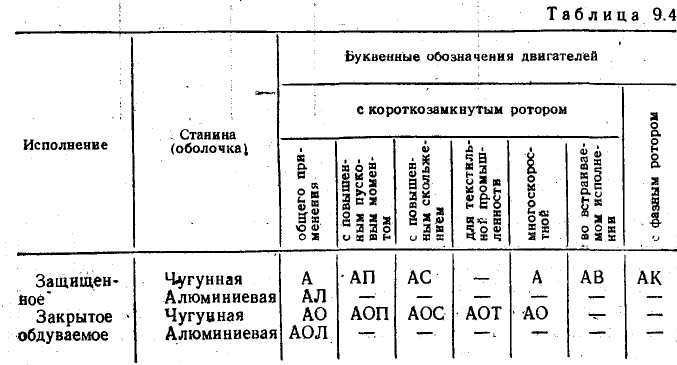 Кроме асинхронных электродвигателей единой серии, промышленностью выпускаются электродвигатели асинхронные взрыво-защищенные серии КОМ, К и МА, имеющие применение и на речном транспорте. Электродвигатели серии КОМ изготовляются с кремнийорганической изоляцией и с внешним обдувом. Шкала мощностей этих двигателей включает 17 ступеней от 0,6 до 100 квт со скоростью вращения 3000, 1500, 1000, 750 об/мин. Электродвигатели серии МА36 изготовляются со шкалой мощностей 40, 55, 75, 100, 125, 160, 200, 250 квт и скоростью вращения 3000—750 об/мин. Электродвигатели типа МА140Ф — со шкалой мощностей 18, 21, 22,5, 28, 31, 38, 42, 52 квт и типа МА36Ф — со шкалой мощностей 55, 70 и 90 квт с фазным ротором и скоростью вращения 1000 и 750 об/мин. В табл. 9.5 приведены формы исполнения асинхронных электродвигателей по условиям защиты от воздействия окружающей среды. 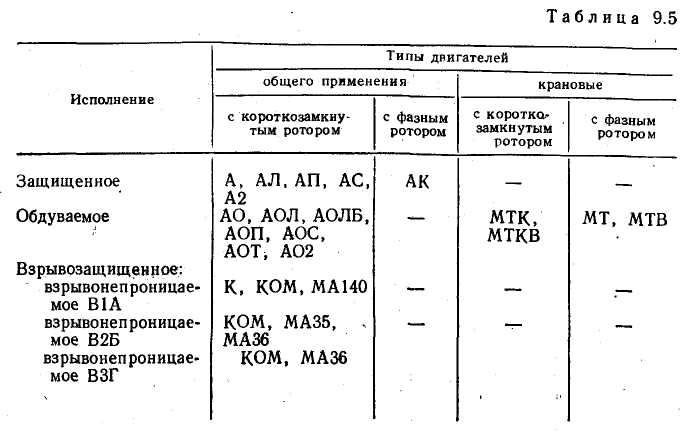 § 9.14. Поворотные автотрансформаторы и трансформаторы Асинхронный двигатель с контактными кольцами может быть использован для плавного изменения в широких пределах напряжения. Обмотки статора и ротора трехфазного поворотного автотрансформатора (рис 9.22) соединены между собой электрически с помощью гибких соединительных проводников таким образом, чтобы ротор машины мог свободно поворачиваться в пределах от 0 до 180°. При подключении поворотного автотрансформатора к сети обмотка ротора создаст вращающееся магнитное поле, которое в обеих обмотках будут наводить э. д. с. E1и Е2. При совпадении осей обмоток электродвижущая сила обмотки ротора E1 будет почти полностью уравновешивать напряжение U1Электродвижущая сила E2 совпадает по фазе с напряжением U1и складывается с ним (рис. 9.23). На выходе машины действует U2=E2+U1. При повороте 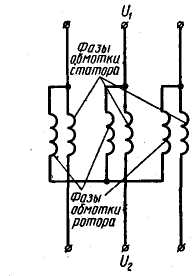 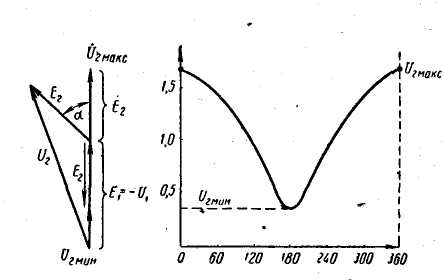 Рис. 9.22. Поворотный автотрансформатор Рис.9.23. Векторная диаграмма напряжений поворотного автотрансформатора. ротора изменяется расположение осей обмоток статора и ротора и, следовательно, между векторами Е2и U1 образуется некоторый угол смещения а. Так как напряжение на выходе автотрансформатора U’2 равно геометрической сумме E2+U1, то оно уменьшается. При повороте ротора на 180 эл. град, на выходе машины устанавливается минимальное напряжение U2мин. Таким образом, напряжение на выходе поворотного автотрансформатора может меняться в пределах от U2МАКС =U1+E2до U2МИН=U1— Е2. Поворотные автотрансформаторы применяются в лабораториях, в схемах автоматики, в распределительных сетях, для регулирования рабочих режимов ртутных выпрямителей и т.д. Поворотные трансформаторы или фазорегуляторы представляют собой трехфазную асинхронную машину с контактными кольцами. Ротор машины затормаживается посредством червячной передачи. В отличие от поворотного автотрансформатора обмотки статора и ротора между собой электрически не связаны. Фазорегулятор предназначен для изменения фазы вторичного напряжения относительно первичного напряжения. Величина вторичного напряжения при этом остается неизменной. Изменение фазы вторичного напряжения осуществляется поворотом ротора относительно статора. Первичное напряжение подводится к обмотке статора, вторичное напряжение U2=U1 снимается с зажимов роторной обмотки. Поворотные трансформаторы широко применяются в измерительной технике и схемах автоматических устройств. § 9.15. Однофазный асинхронный двигатель Однофазный асинхронный двигатель состоит из статора с уложенной в eго пазы однофазной обмоткой и короткозамкнутого ротора (рис. 9.24) в виде беличьей клетки. При питании обмотки статора однофазным переменным током возникает пульсирующее магнитное поле, которое может быть разложено на два вращающихся в пространстве с одинаковой скоростью, но в противоположные стороны поля (рис 9.25) 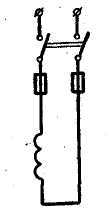  Рис. 9.24. Схема однофазного асинхронного двигателя Амплитуды этих полей равны половине амплитуды вращающегося пульсирующего поля Результирующий момент, действующий на ротор, будет равен нулю, и ротор останется неподвижным. Обратное поле, имеющее направление вращения обратное вращению ротора, будет наводить в его обмотке ток частотой 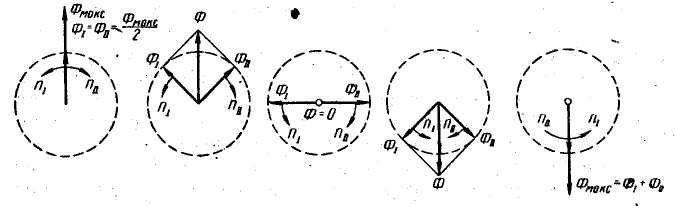 Р-ис. 9.25. Пульсирующее поле и вращающий момент однофазного асинхронного двигателя Отсюда токи, наведенные обратным полем в обмотке ротора, имеют значительно большую частоту, чем токи, наведенные прямым полем. Так, при f1=50 гц и s=0,05, частоты f2I=2,5 гц, I2II = =97,5 гц. 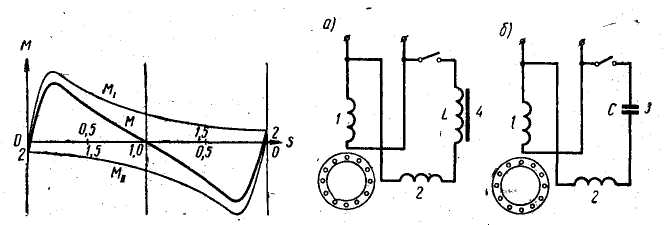 Рис. 9.26. Моменты вращения однофазного двигателя Рис9.27. Пусковые схемы однофазных двигателей а) с емкостью в цепи пусковой обмотки б) с индуктивностью в цепи пусковой обмотки Индуктивное сопротивление обмотки ротора при такой частоте будет во много раз больше ее активного сопротивления, токи почти чисто реактивными и на обратное поле они будут действовать размагничивающе. Вращающий момент практически весьма мал. Величина результирующего момента на роторе двигателя выражается суммой ординат MIи MII(рис. 9.26). При малых значениях скольжения s, т. е. при работе двигателя с номинальной нагрузкой, вращающий момент М создается в основном за счет момента M1 . При sI= sII =1 моменты MI = MIIи результирующий момент равен нулю. Двигатель самостоятельно не может начать вращение. Для пуска однофазных асинхронных двигателей применяют специальные схемы (рис. 9.27). Например, пуск двигателя осуществляется созданием в нем на время пуска вращающегося магнитного поля. -Для этого в пазы статора закладываетcя дополнительная пусковая обмотка, сдвинутая в пространстве относительно рабочей обмотки на 90 эл. град. Чтобы переменные токи в рабочей и дополнительной обмотках были сдвинуты по фазе на 90° и создавали вращающееся магнитное поле, последовательно с пусковой обмоткой включаются активное или индуктивное сопротивления или емкость. Пуск такого двигателя осуществляется непосредственным включением в сеть. При включении в пусковую обмотку активного или индуктивного сопротивлений (рис. 9.27, а) получить требуемый сдвиг фаз на 90 эл. град, нельзя и пусковой момент двигателя мал. При использовании емкости (рис. 9.27, б) это условие осуществляется, и двигатель развивает значительный начальный пусковой момент. Однофазные двигатели, работающие с постоянно включенным в их дополнительную обмотку конденсатором, называются конденсаторными двигателями. Если пусковая обмотка с конденсатором используется только в период пуска, то двигатель называется с конденсаторным пуском. Конденсаторные, двигатели обладают рабочими характеристиками, немного уступающими рабочим характеристикам трехфазных двигателей. Однако их пусковой момент составляет всего 0,2 Коэффициент мощности конденсаторных двигателей ( § 9.16. Асинхронные машины в системе синхронной связи В схемах автоматического контроля и управления, а также машинных телеграфов и указателей положения пера руля на судах имеют широкое применение однофазные и трехфазные асинхронные машины, называемые сельсинами. Система синхронной связи представляет собой электрическое соединение двух или нескольких электрических машин, датчиков и приемников, имеющих согласованное вращение или обеспечивающих поворот их роторов на одинаковый угол. Сельсины могут быть трехфазными или однофазными. На рис. 9.28 показано соединение двух трехфазных сельсинов в системе синхронной связи. Статорные обмотки машин подключены к питающей сети, а роторные — включены навстречу друг другу. При одинаковых пространственных положениях роторов машин вторичные э. д. с. E2Iи E2II, наводимые в обмотках ротора вращающимися магнитными полями, одинаковы по величине, противоположны по фазе и уравновешивают друг друга. Токи в цепи роторов отсутствуют, и ротор неподвижен. При повороте ротора сельсина датчика на некоторый угол 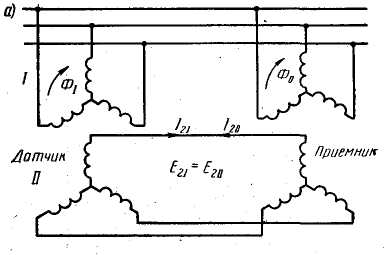 Примером использования системы синхронной связи может служить указатель положения пера руля (аксиометр). В румпельном помещении судна устанавливается сельсин-датчик, ротор которого механически связывается с баллером руля. В ходовой рубке судна размещается сельсин-приемник. При положении пера руля вдоль-нейтральной плоскости судна система находится в равновесии и. пространственное положе- Примером использования системы синхронной связи может служить указатель положения пера руля (аксиометр). В румпельном помещении судна устанавливается сельсин-датчик, ротор которого механически связывается с баллером руля. В ходовой рубке судна размещается сельсин-приемник. При положении пера руля вдоль-нейтральной плоскости судна система находится в равновесии и. пространственное положе-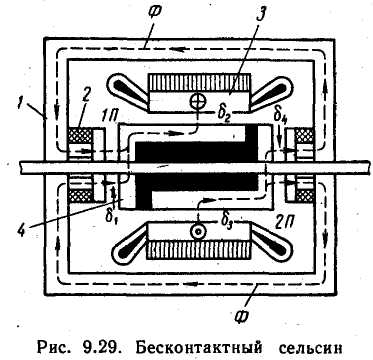 ние осей роторов одинаково. При перекладке руля на какой-либо угол ротор сельсина-датчика поворачивается на тот же заданный угол. Это вызывает рассогласование системы синхронной связи. Возникающие моменты стремятся уничтожить возникшее рассогласование и ротор сельсина-приемника поворачивается на угол рассогласования. Ротор сельсина-приемника связан со ние осей роторов одинаково. При перекладке руля на какой-либо угол ротор сельсина-датчика поворачивается на тот же заданный угол. Это вызывает рассогласование системы синхронной связи. Возникающие моменты стремятся уничтожить возникшее рассогласование и ротор сельсина-приемника поворачивается на угол рассогласования. Ротор сельсина-приемника связан со 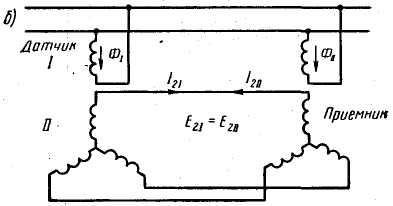 стрелкой, которая на шкале угла поворота пера руля фиксирует, на какой угол произошло смещение пера руля от его нейтрального положения. Таким образом судоводитель в любой момент может видеть, в каком положении находится руль. стрелкой, которая на шкале угла поворота пера руля фиксирует, на какой угол произошло смещение пера руля от его нейтрального положения. Таким образом судоводитель в любой момент может видеть, в каком положении находится руль.Однофазные сельсины выполняются с однофазной обмоткой статора и трехфазной обмоткой ротора (рис. 9.28, б). Трехфазные обмотки сельсина-датчика и сельсина-приемника соединяются между собой так же, как и в трехфазной системе. Принцип работы системы тот же, при этом поворот роторов возможен в обе стороны. Конструктивно устройство сельсинов мало чем отличается от обычных асинхронных двигателей с контактными кольцами. Чаще всего обмотка статора располагается на явно выраженных полюсах благодаря чему достигается наибольший вращающий момент. Широкое распространение имеют бесконтактные сельсины, у которых отсутствует скользящий электрический контакт (контактные кольца и щетки). Ротор бесконтактного сельсина не имеет обмотки и представляет собой цилиндр, разделенный по продольной оси на две части, Образующие два магнитных полюса. Полюсы отделены друг от друга немагнитным материалом. Обе обмотки бесконтактного сельсина: первичная — однофазная обмотка возбуждения и вторичная — трехфазная расположены неподвижно на статоре. Трехфазная обмотка закладывается в пазы внутренней расточки и состоит из двух последовательно соединенных катушек. Магнитный поток Ф, создаваемый обмоткой возбуждения 2 (рис. 9.29), проходит по внешнему магнитопроводу 1, через воздушный зазор В контактном сельсине изменение положения вторичной обмотки относительно первичной достигалось поворотом ротора, на котором расположена вторичная обмотка. В бесконтактном сельсине обмотки неподвижны, а первичный магнитный поток поворачивается по отношению к фазным обмоткам статора на угол, определяемый углом поворота ротора. Величины э.д.с, наводимых в фазных обмотках сельсина, зависят от углового положения ротора. Электрическая схема синхронной связи с бесконтактными сельсинами аналогична схемам синхронной связи с контактными сельсинами. Основное преимущество бесконтактных сельсинов — отсутствие скользящих электрических контактов. Недостатками являются: наличие четырех воздушных зазоров; более тяжелый ротор, что вызывает больший износ подшипников; больший момент инерции ротора, увеличивающий динамические ошибки сельсина. |