Параллельная работа синхронных генераторов
 Скачать 3.19 Mb. Скачать 3.19 Mb.
|

|
§ 9.8. Рабочие характеристики асинхронного двигателя Рабочие характеристики показывают зависимости: скорости вращения п2, величины тока в статоре I1момента М2, коэффициента мощности Рабочие характеристики двигателя даны на рис. 9.8. Скоростная характеристика n2=f(Р2) представляет собой кривую, слегка наклоненную к оси абсцисс. Скорость вращения двигателя определяется по формуле n2=n(1—s). В то же время скольжение зависит от отношения потерь в меди Рм2 к развиваемой двигателем электромагнитной мощности; При холостом ходе PM2=0 отсюда s=0 и n2=n1. С увеличением нагрузки отношение PM2/PЭМ растет, но в очень ограниченных пределах. При увеличении нагрузки от нуля до номинальной скольжение s меняется в пределах 1,5—5%, поэтому и скорость двигателя меняется незначительно. Таким образом, асинхронный двигатель обладает жесткой скоростной характеристикой. - Характеристика момента М2=f(Р2) подобна характеристике синхронного двигателя, так как скорость двигателя в пределах номинальной нагрузки остается практически постоянной. К. п. д. двигателя, определяемый зависимостью Коэффициент мощности cosφ при недогрузке двигателя резко падает вследствие того, что при холостом ходе и малых нагрузках двигатель потребляет реактивный намагничивающий ток, отстающий по фазе от напряжения на угол, близкий к 90°, поэтому всегда следует загружать двигатель в соответствии с его номинальной мощностью. Коэффициент мощности асинхронного двигателя при холостом ходе не превышает 0,2, однако с ростом нагрузки он быстро увеличивается и достигает наибольшего значения (0,8 Номинальные значения к.п.д η и коэффициента мощности cosφ различных асинхронных двигателей единой серии приведены в табл.9.2 Потребляемая мощность P1 и ток статора I1 с увеличением полезной мощности возрастают. За счет увеличения потерь (главным образом в меди) возрастание Р1 и I1 при больших нагрузках ускоряется, и кривые загибаются вверх. 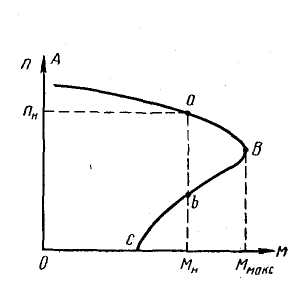 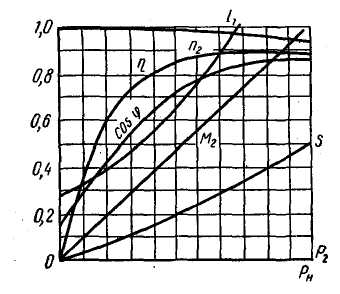 Рис. 9.8. Рабочие характеристики асинхронного двигателя Рис. 9.9. Механическая характеристика n2=f(M) асинхронного двигателя 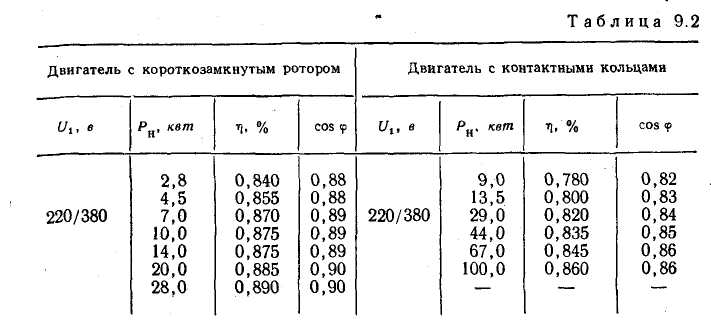 Механическая характеристика n2=f(М) является обращенной кривой зависимости момента от скольжения M=f(s) (рис. 9.9). Она также делится на устойчивую и неустойчивую части. В пределах устойчивой части характеристики (АВ) действует принцип саморегулирования двигателя: при увеличении момента нагрузки на валу двигателя число оборотов двигателя уменьшается, скольжение увеличивается, увеличивается и ток, а с ним и момент вращения до уравнения его с моментом сопротивления. В неустойчивой части, характеристики (ВС) при увеличении момента сопротивления и уменьшении числа оборотов момент также уменьшается и двигатель останавливается. Для оценки пусковых свойств асинхронных двигателей учитывается отношение начального пускового момента Mпуск к номинальному МH, т. е. Для асинхронных двигателей с короткозамкнутым ротором мощностью более 100 кет кратность начального пускового момента kНЧне должна быть ниже 0,7 и достигает практически 1,5. § 9.9. Круговая диаграмма асинхронного двигателя Рабочие характеристики асинхронного двигателя могут быть построены по круговой диаграмме. Круговая диаграмма с достаточной точностью позволяет проследить характер изменения основных параметров двигателя при изменении его нагрузки Р2 и получить их численные значения. При прохождении тока I по простейшей электрической цепи, состоящей из постоянного по величине индуктивного сопротивления х (рис. 9.10, а) и переменного активного сопротивления г, на участках цепи создается падение напряжения, имеющее активную Ua=Irи индуктивную UL=Ixсоставляющие. Векторы падений напряжений образуют прямоугольный треугольник напряжений ABC(рис. 9.10, б) с постоянной гипотенузой АС=U. Из геометрии известно, что вершина прямоугольного треугольника В лежит на окружности, описанной на диаметре АС и являющейся геометрическим местом точек В. 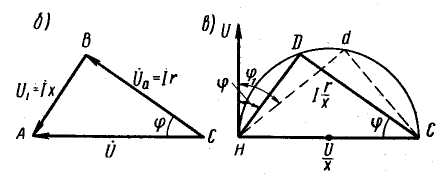 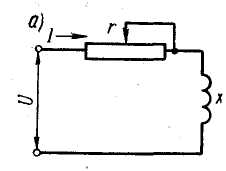 Рис. 9.10. Основа построения круговой диаграммы Если стороны прямоугольного треугольника ABCразделить на х, то будет получен треугольник HDC, являющийся треугольником токов (рис. 9.10, в). Вектор HDявляется вектором тока I. Конец вектора HD=Iпри изменении величины активного сопротивления r(U=const, x=const) описывает окружность HDCкруга токов. Вектор напряжения Uоткладывается в положительном направлении оси ординат. Вектор тока HD=Iобразует с напряжением Uуглы При r=оо ток I=0 и угол На рис.9.5 была приведена схема замещения асинхронного двигателя. При построении круговой диаграммы обычно пользуются преобразованной схемой замещения, в которой намагничивающий контур выделен в самостоятельную цепь (рис.9.11). Рабочий и намагничивающий контуры независимы друг от друга, к их зажимам приложено напряжение U1. По рабочему контуру протекает ток I2', по намагничивающему контуру - ток I0. 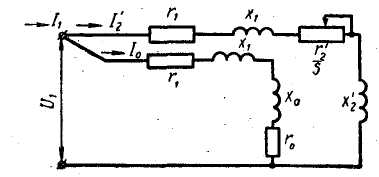 Рис. 9.11. Схема замещения асинхронного двигателя с выделенным намагничивающим контуром Работа намагничивающего контура определяется векторной диаграммой, приведенной на рис. 9.12, а. Индуктивное сопротивление намагничивающего контура несравненно больше активного. Угол 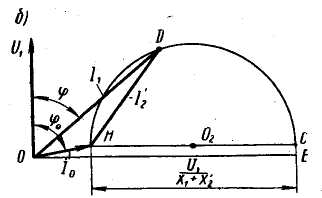 При изменении величины скольжения s меняется геометрическое место точек вектора тока на окружности При изменении величины скольжения s меняется геометрическое место точек вектора тока на окружности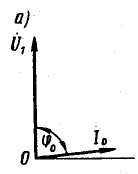 Рис. 9.12. Круг токов Круговая диаграмма представляет собой совмещение диаграмм рабочего и намагничивающего контуров (рис. 9.12, б). На приведенной диаграмме потребляемый двигателем ток равен геометрической сумме токов I1=Io+(- I2')- Круговая диаграмма строится на основании опытов холостого хода и короткого замыкания. При проведении опыта холостого хода (рис. 9.13) двигатель работает вхолостую. Параметры холостого хода I0 и P0снимают при 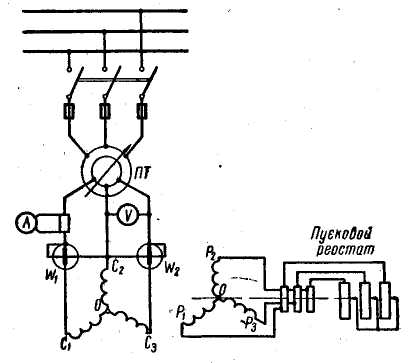 Рис. 9.13. Опыт холостого хода асинхронного двигателя различных значениях подводимого напряжения, которое изменяется от 0,5 до 1,2 (/„, с помощью поворотного трансформатора ПТ. Обычно круговая диаграмма строится при Ui=Uia. По показаниям измерительных приборов получают значения /0 и Ро для напряжения U1н, подводимого к обмотке статора. По полученным данным вычисляют Опыт короткого замыкания проводят по схеме, изображенной на рис. 9.13, но при заторможенном роторе и замкнутой накоротко его обмотке; напряжение при этом понижается до (0,15—0,25) UH. Проводить опыт короткого замыкания при номинальном напряжении нельзя, так как в этом случае ток короткого замыкания /к 3 может составить (7 Мощность короткого замыкания РКЗ. определяется по показанию ваттметра при напряжении UКЗ при котором ток Iк.3 = Iн Полученные данные Iк.3 и PК.Зпересчитывают на номинальное напряжение: С Построение линии тока. Для построения круговой диаграммы используются данные опытов холостого хода и короткого замыкания: ток холостого хода I0 при номинальном напряжении и частоте; мощность при холостом ходе P0; фазный ток статора короткого замыкания IКЗ при номинальном напряжении, полученный при пересчете по формуле п сопротивление фазы обмотки статора r1приведенное к рабочей температуре. Построение начинают с вектора U1приложенного к двигателю напряжения, который откладывают по оси ординат (рис. 9.14). Задаются масштабом тока и под углом 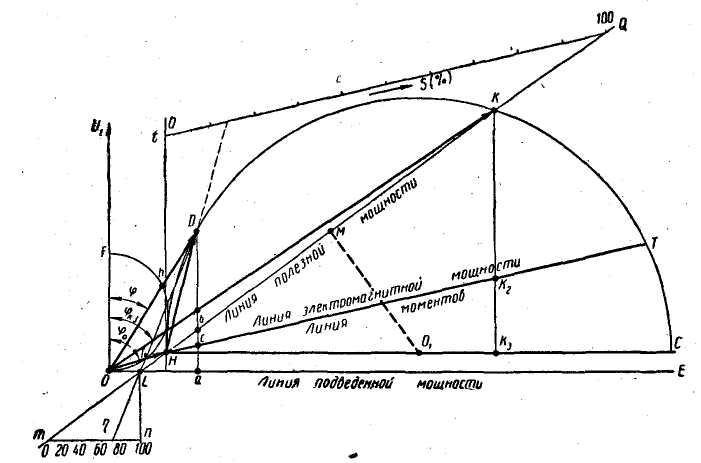 Рис9.14 построение круговой диаграммы Для определения величин токов из точки О в выбранном масштабе откладывают вектор ODтока нагрузки IH. При изменении нагрузки точка D(конец вектора OD) перемещается по окружности НК. При холостом ходе точка Dсовмещается с точкой Н, а при коротком замыкании — с точкой К.. Если точку D соединить с точкой Н, то получится треугольник токов ODH. Из этого треугольника, зная масштаб токов mi определяют ток I2'=HD- Если же из точки Dопустить перпендикуляр. на ось абсцисс ОЕ, то из прямоугольного треугольника ODaопределяют активную составляющую тока I1a= miDaи реактивную составляющую тока I1p=mi0а. Построение линий мощности. Подведенная к двигателю мощность P1определяется по формуле P1= Так как отсчет подведенной мощности всегда производится от оси абсцисс, то линия ОЕ называется линией подведенной мощности, Линия полезной мощности Р2 на круговой диаграмме представляет собой прямую, проходящую через точки на окружности токов, в которых полезная мощность равна нулю, т. е. через точки Н и K .Отсюда, линия НК является линией полезной мощности, а полезная мощность Р2 Для тока нагрузки I1H=ODопределяется отрезком Dbс учетом масштаба мощности P2= mpDb. Линия электромагнитной мощности Рэм является одновременно линией вращающего момента М. Для построения линии электромагнитной мощности Рэм и вращающих моментов М надо опустить из точки К перпендикуляр на линию НС. Полученный отрезок КК3 делится в отношении где активное сопротивление одной фазы обмотки статора при опыте к.з. r1 - активное сопротивление одной фазы обмотки статора Вычислив и наметив положение точки K2на отрезке ККз,проводят через нее и точку Н (в которой скольжение s=±0) прямую до ее пересечения с окружностью тока — точка Т. Прямая НТ и является линией электромагнитной мощности и вращающих моментов, проходящей через точки, в которых скольжение s=0 (точка H) и s= ± В Построение линии скольжения. Для построения линии скольжения из точки Н восстанавливают перпендикуляр Htи проводят параллельно линии электромагнитной мощности НТ прямую tQ, пересекающую перпендикуляр Htи продолжение линии НК.. Полученный отрезок прямой tQделят на 100 равных частей (величина скольжения в %). Величина скольжения для данной нагрузки определяется продолжением линии HD=I2' до пересечения с линией скольжения. Численное значение на шкале соответствует величине скольжения. Графическое определение коэффициента мощности. Для определения величины коэффициента мощности на оси ординат строят окружность произвольного диаметра. Коэффициент мощности Графическое определение к. п. д. Для графического определения величины к. п. д. двигателя строят шкалу к. п. д. D и L. Построение рабочих характеристик. Рабочие характеристики асинхронных двигателей небольшой мощности могут быть определены в результате измерений тока I1, мощности Р1скорости вращения п2и момента М на валу машины при различных нагрузках. По данным измерений рассчитывают Р2, Порядок построения круговой диаграммы разобран выше. Задаваясь различными значениями токов статора I1(0,25, 0,5, 0,75, 1,0 и 1,25 IH) и масштабом тока, строят на окружности точки D1 D2, D3и т. д. и в масштабе основные линии и характеристики. |