Параллельная работа синхронных генераторов
 Скачать 3.19 Mb. Скачать 3.19 Mb.
|

|
§ 7.2. Влияние величины тока возбуждения на работу синхронных двигателей При постоянной нагрузке на валу синхронного двигателя (Р=3UI Когда э. д. с. машины определяется вектором E02, вектор тока I02,сдвинутый относительно вектора э.д.с. Такой режим работы двигателя называется перевозбужденным. При уменьшении тока возбуждения двигателя его э. д. с. также уменьшается (E03<E02) и между вектором тока I03 и вектором напряжения UCсоздается положительный сдвиг фаз на угол 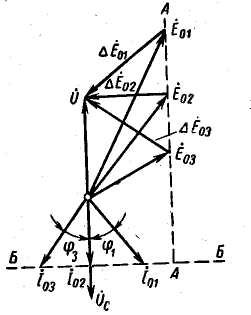 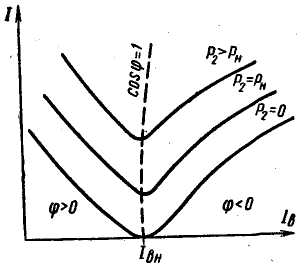 Рис. 7.3. Угловые характеристики синхронных машин Таким образом, воздействуя на величину возбуждения двигателя, можно менять угол сдвига фаз между его векторами тока и напряжения. Двигатель может работать не только с коэффициентом мощности, равным единице ( Для каждой нагрузки синхронного двигателя можно получить расчетным или опытным путем зависимости величины потребляемого тока I от тока возбуждения IB (рис. 7.4). Эти зависимости называются U-образными кривыми. Ток IBH соответствует работе двигателя при коэффициенте мощности Левые ветви характеристик соответствуют индуктивному току (ф>0), а правые ветви — емкостному току (ф<0). Синхронные двигатели, работающие с перевозбуждением, используются для повышения коэффициента мощности электрических установок и называются синхронными компенсаторами. § 7.3. Рабочие характеристики синхронных двигателей Синхронные двигатели обладают рядом особенностей, о которых лучше всего судить по их рабочим характеристикам (рис. 7.5). Эти характеристики показывают зависимость I, п, М, М2, P1 Момент двигателя М=М0+М2, где Мо— момент холостого хода, М2— полезный тормозной момент. Так как M0=const, а М2=P2/ 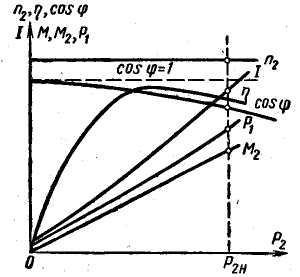 Кратковременная перегрузочная способность синхронного двигателя, так же как и синхронного генератора, зависит от величины угла Кратковременная перегрузочная способность синхронного двигателя, так же как и синхронного генератора, зависит от величины угла При этих значениях кратковременная перегрузочная способность синхронного двигателя (см. рис. 7.2) Рис. 7.5. Рабочие характеристики синхронного двигателя Подведенная к двигателю мощность P1включает в себя потери (Р1=P2+ Поэтому увеличение потребляемой мощности Р1 происходит несколько в большей мере, чем полезной мощности Р2 и характеристика Р1=f(Р2) имеет некоторую кривизну в сторону оси абсцисс. Ток пропорционален вращающему моменту и он будет выражаться той же прямой, что и момент М. При изменении нагрузки от 0 до 1/2 Pн кривая к. п. д. быстро возрастает, а затем ее рост прекращается, и к. п. д. машины даже понижается. Изменение Синхронные двигатели применяются главным образом для привода механизмов значительной мощности (свыше 100 кет), требующих постоянства числа оборотов. В судовых условиях они используются в основном на судах технического флота (земснарядах), в электрических приводах компрессоров, центробежных насосов, лебедок, а также в системах генератор-двигатель. § 7.4. Пуск синхронных двигателей Рис. 7.6. Схема пуска синхронного двигателя Пуск синхронных двигателей осложняется тем, что при включении двигателя в сеть трехфазного переменного тока в обмотке его статора возникает вращающееся магнитное поле, сразу приобретающее синхронную скорость п1= 60f/p, в то время как поле полюсов неподвижно. Вследствие этого каждые полпериода перед полюсом ротора проходят то северный, то южный полюса вращающегося поля статора и возникающий в результате взаимодействия полей электромагнитный момент в течение периода дважды меняет свое направление. Ротор остается неподвижным, так как он обладает значительной инерцией и в течение полупериода ему не может быть сообщена синхронная скорость, при которой электромагнитный вращающий момент будет иметь строго определенное постоянное направление. Поэтому, чтобы осуществить пуск синхронного двигателя, необходимо сначала сообщить ему с помощью небольшого постороннего двигателя скорость вращения, близкую к синхронной. Такой способ пуска синхронных двигателей, во-первых, требует дополнительной электрической машины, а, во-вторых, возможен лишь при незначительной нагрузке на валу двигателя. В  настоящее время чаще всего применяется так называемый асинхронный пуск синхронных двигателей (рис. 7.6, а), для чегo в пазы полюсных наконечников ротора закладывается специальная л пусковая обмотка в виде стержней, соединенных между собой поторцам так, что образуется короткозамкнутая клетка. При включении двигателя в сеть трехфазного тока в его статорной обмотке создается вращающееся магнитное поле, которое пересекая короткозамкнутые стержни пусковой обмотки, наводит в ней ток. Магнитное поле пусковой обмотки, взаимодействуя с вращающимся магнитным полем статора, создает вращающий момент и быстро развивает скорость, близкую к синхронной. После этого включают питание обмотки возбуждения (от возбудителя В), и двигатель втягивается в синхронизм. Во время разгона обмотка возбуждения двигателя должна быть замкнута на сопротивление R, так как иначе в ней наводилась бы большая э. д. с, опасная для состояния изоляции обмотки. настоящее время чаще всего применяется так называемый асинхронный пуск синхронных двигателей (рис. 7.6, а), для чегo в пазы полюсных наконечников ротора закладывается специальная л пусковая обмотка в виде стержней, соединенных между собой поторцам так, что образуется короткозамкнутая клетка. При включении двигателя в сеть трехфазного тока в его статорной обмотке создается вращающееся магнитное поле, которое пересекая короткозамкнутые стержни пусковой обмотки, наводит в ней ток. Магнитное поле пусковой обмотки, взаимодействуя с вращающимся магнитным полем статора, создает вращающий момент и быстро развивает скорость, близкую к синхронной. После этого включают питание обмотки возбуждения (от возбудителя В), и двигатель втягивается в синхронизм. Во время разгона обмотка возбуждения двигателя должна быть замкнута на сопротивление R, так как иначе в ней наводилась бы большая э. д. с, опасная для состояния изоляции обмотки.Непосредственный пуск синхронных двигателей возможен лишь при достаточно мощных электрических сетях, так как пусковой ток двигателей равен 5—6-кратной величине номинального тока. Для снижения пускового тока применяют пуск с переключением обмотки статора со звезды на треугольник, что дает снижение линейного тока в 3 раза. Однако чаще пуск синхронных двигателей производят при пониженном напряжении, для чего используется автотрансформатор или реактор. Автотрансформаторный пуск (рис. 7.6, б) производится тремя ступенями. Вначале к двигателю подводится напряжение U= =40—60%UH. Когда двигатель разовьет соответствующее число оборотов, размыкается выключатель В2у автотрансформатора, и он используется как реактивная катушка. При этом к двигателю подводится напряжение U=70—80% UH. Наконец, замыкается выключатель В1 и к двигателю подается номинальное напряжение UH а к его обмотке возбуждения — постоянный ток. При автотрансформаторном пуске пусковой ток в сети (ток первичной обмотки трансформатора) пропорционален квадрату напряжения. Реактивный пуск синхронных двигателей проще и дешевле, но при нем пусковые токи в сети имеют большую величину. § 7.5. Реактивный двигатель Реактивный синхронный двигатель не имеет обмотки возбуждения. Ротор реактивной машины выполняется с явновыраженными полюсами. Возбуждение машины происходит вследствие намагничивания ротора вращающимся магнитным полем статора. При этом ротор стремится занять по отношению к статору такое положение, при котором его магнитное сопротивление было бы наименьшим. Так как поле статора вращается с синхронной скоростью, то начинает вращаться с той же скоростью и ротор, втягиваясь в синхронизм. Возбуждение машины происходит за счет ,реактивной составляющей тока, поступающего из сети. реактивная составляющая тока создает продольный магнитный поток, который и является потоком возбуждения машины. _ Исходя из уравнения электромагнитной мощности для явно-полюсной синхронной машины и полагая Е0=0, получаем уравнение для РЭМ реактивного двигателя: Отсюда следует, что максимальное значение Рэм имеет при sin2 Для получения наибольшей электромагнитной мощности надо, чтобы разность хd xq, была как можно больше. Это достигается соответствующим конструктивным исполнением ротора. Обычно у реактивных синхронных двигателей отношение. Пусковой момент у реактивных двигателей создается за счет взаимодействия вращающегося магнитного поля с вихревым током в массивных частях ротора. Реактивные синхронные двигатели небольшой мощности в настоящее время имеют весьма широкое распространение в схемах сигнализации, телемеханики, связи и т. д. Недостатками двигателей являются сравнительно небольшой к. п. д. и коэффициент мощности, большие размеры и масса. В то же время простота конструкции, отсутствие скользящих контактов, малая стоимость в значительной степени компенсируют их недостатки. § 7.6. Потери и коэффициент полезного действия синхронных машин У синхронных машин так же, как и у машин постоянного тока, имеются электрические РM, магнитные РСТ потери на возбуждение РB, механические РMEX и добавочные РДОБ потери. К добавочным относятся потери в полюсных наконечниках или в поверхностном слое бочки ротора. На рис. 7.7, а дана энергетическая диаграмма синхронного генератора. Часть мощности первичного двигателя P1, подводимой к генератору, затрачивается на покрытие механических потерь РMEX потерь в стали РСТ и потерь на возбуждение РВ. Мощность, получающаяся за вычетом этих потерь, является электромагнитной мощностью PЭM. Она передается в статор в результате взаимодействия основного магнитного потока с токами в статоре, т. е - электромагнитным путем. Полезная мощность Р2получается в результате вычитания из электромагнитной мощности PЭM потерь в меди РМ, возникающих в обмотке статора при работе машины под нагрузкой. Эти потери у машин средней мощности составляют менее 1% и практически ими можно пренебречь, тогда Р2=РЭМ. Потери на возбуждение складываются не только из потерь в обмотке возбуждения синхронного генератора, но и из потерь в возбудителе, когда он установлен на одном валу с генератором, и потерь в реостатах возбуждения. Механические потери включают в себя потери на трение в подшипниках и вращающихся частей о воздух, а также потери на вентиляцию. У быстроходных машин эти потери значительно 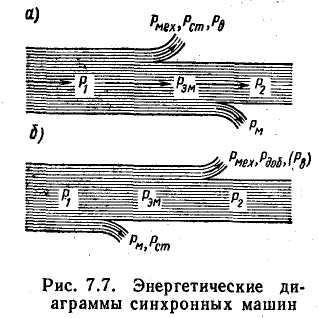 возрастают за счет увеличения потерь на трение о воздух и достигают 50—60% всех потерь. Добавочные потери складываются из потерь от потоков рассеяния в статоре, а также потерь, вызванных высшими гармоническими полями статора. возрастают за счет увеличения потерь на трение о воздух и достигают 50—60% всех потерь. Добавочные потери складываются из потерь от потоков рассеяния в статоре, а также потерь, вызванных высшими гармоническими полями статора.На рис. 7.7, б дана энергетическая диаграмма синхронного двигателя. Часть мощности P1подводимой к двигателю из сети, затрачивается на покрытие потерь в меди и стали статора (РМи РСТ), остальная часть составляет электромагнитную мощность РЭМ, передаваемую со статора на ротор. Полезная мощность на валу двигателя Р2 получается в результате вычитания из электромагнитной мощности механических потерь на трение и вентиляцию и добавочных потерь. Кроме того, из электромагнитной мощности вычитается мощность, потребляемая возбудителем, если он находится на одном валу с двигателем. Коэффициент полезного действия синхронных машин определяется по формулам: для двигателя  для генератора для генераторадля генератора У мощных синхронных машин к. п. д. достигает 96—99%. У синхронных машин небольшой мощности (от 2 до 100 кет) к. п. д. составляет 85—90%. |