Шпоры ЛСАР. 1 1 Основные понятия и определения тау
 Скачать 421.5 Kb. Скачать 421.5 Kb.
|

|
1 1) Основные понятия и определения ТАУ ТАУ - это научная дисциплина, образующая в совокупности науку об управлении. ТАУ появилась с появлением механизмов. Линейные непрерывные системы АУ. Основные понятия АУ: рабочая операция; операция управления; К рабочим операциям отн-ся все действия, необходимые для выполнения процесса в соответствии теми или иными законами, которыми определяется ход данного процесса (вращение вала эл./двигателя). Для улучшения и усовершенствования рабочих операций используются автоматические устройства, которые полностью или частично заменяют труд человека. Замена труда человека наз-ся механизацией. Для правильного и качественного выполнения операций необходима операция управления. По средствам операции упр-ния обеспечивается в нужный момент времени начало, порядок следования и окончание операции, при этом придаются необх-е параметры самому процессу. Совокупность управления операций образует процесс управления. Операция управления также как и раб. операция частично или полностью выполняться технологическими устройствами в системе. Замена труда человека в операции упр-ния наз-ся автоматизацией. Совокупность средств упр-ния и объекта образует систему управления. Система, в которой все рабочие и управляющие операции выполняются полностью без участия человека, наз-ся автоматической системой. Система, которая автоматизирует только часть управления, наз-ся автоматизированной системой. Чтобы осуществить авт. упр-ние или создавать систему упр-ния необходимы конкретные знания рабочего процесса, принципа его работы; необходимы знания методов упр-ния, которые явл-ся общими для самых разнообразных процессов. При автоматизации упр-ния тех. процессов возникает необходимость в различных группах операций упр-ния. В ТАУ изучают операции по поддержанию заданного закона изменения значений координат. 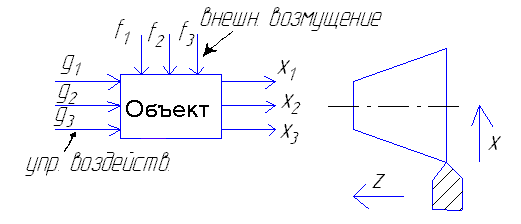 Переменные x, g и f в зависимости от природы объекта могут быть связаны различными соотношениями. В общем виде: x = A (g,f), где функция А явл-ся оператором объекта определенных видов математической зависимости. Всякий объект обладает массой, т.е. он динамический. Переменные x, g и f динам-х объектов обычно связаны м/у собой дифференциальными, интегральными или разностными уравнениями. В качестве независимой этих переменных выступает время 2. Передаточные функции импульсных систем. Когда сигнал имп. элем. сущ.: W*(q;0)=Y*(q;0)/(Ku·X*(q;0)). Когда попад. в промеж. между имп.: W*(q;ε)=Y*(q;ε)/(Ku·X*(q;0)). Перед. функции получены из реакции лин. части на послед. имп. Свойства: 1) перед. ф. имп. САР явл. ф. аргум. e^q, т.к. e^q=e^(q+2πi), где i=0;±1; ±2;…. В этом слу. W*(q) явл. периодич. ф. с периодом 2π. 2) перед. ф. W*(q; ε) имеет бесчисл. множ. реш., соотв. различ. знач. парам. ε. 3) Для имп. с паузами знач. передат. ф. для интервалов действ. отлич. от знач. для их пауз. 2. 1) Цель курса состоит в изучении принципов автоматического управления, типов систем автоматического управления, используемых в технике, математического аппарата исследования линейных САУ, основных элементов и характеристик САУ, методов анализа САУ на устойчивость и качество управления, способов корректировки свойств линейных САУ 2. В дискрет. САР контр управл. замык. только на опред. промеж. времени, осущ. возд. на исп. орган импульса. В паузах мажду имп. цепь упр. ост. разомкн. Многие из таких систем сост. из одного исм. элем. и непрер. лин. части. По спос. квантования все имп. САР можно разд.: по врем. квантования – имп. САР; по уровню квантов. – релейн.; по врем. – цифровые. Импульсная модуляция с помощью имп. элемента. Имп. элемент преобразует непрерывный сигнал в виде последовательности импульсов. Преобразование непрерывного сигнала в импульсный наз-ся квантованием. Различают след. Виды квантования: амплитудно-импульсное (АИМ); широтно-импульсное (ШИМ); частотно- импульсное (ЧИМ); 1). АИМ – это значит, что амплитуда имп. сигнала зависит от амплитуды непрерывного сигнала в момент квантования. Т-период квантования; - продолжительность времени. 2). ШИМ амплитуда импульса явл-ся величиной постоянной. Импульс, как и в варианте АИМ, также повторяется через постоянный промежуток времени. А время действия импульса явл-ся величиной переменной и зависит от амплитуды непрерывного сигнала в момент квантования. 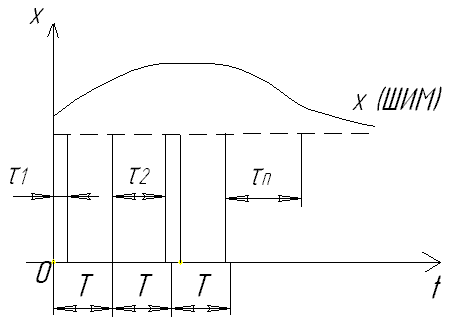 3). ЧИМ. При ЧИМ амплитуда импульса и ширина импульса есть величины постоянные. А частота (период повторяется) импульса зависит от величины амплитуды непрерывного сигнала в момент квантования. 3. 1) Основные принципы регулирования. Принцип разомкнутого управления В основе алгоритма упр-ния заложены 3 фундаментальных принципа: 1) Принцип разомкнутого управления; 2) Принцип обратной связи; 3) Принцип компенсации (регулирование по возмущению); 1) Принцип разомкнутого управления: Алгоритм упр-ния строится только на основе алгоритма функционирования и не контролируется по фактическому значению управляемой величины х. Близость x к U обеспечивается жесткостью характеристик систем. При наличии воздействия f величины х может заметно отклониться от заданной, при этом алгоритм управления станет непригодным. 2) Нелинейные САР. Устойчивость периодических решений Нелинейной системой автоматического управления наз-ся такая система которая содержит хотя бы одно звено описываемое нелинейным уравнением. Пусть постр. две кривых. Будем двиг. по Gнэ(A) в напр. возр. ампл. A. Если разомкн. лин. САР уст., то в вход. точке пересеч. этих двух кривых соотв. неуст. периодия. реш. А точке выч. из контура соотв. уст. решений. Для однознач. хар. этот критерий явл. необход., но не достат.  4 1) Основные принципы регулирования. Принцип обратной связи В основе алгоритма упр-ния заложены 3 фундаментальных принципа: 1) Принцип разомкнутого управления; 2) Принцип обратной связи; 3) Принцип компенсации (регулирование по возмущению); 2) Принцип обратной связи: = g – x. В принципе обратной связи производится управление функции отклонения . g явл-ся функцией от х : g=F(x). 2) Регулирование по возмущению и комбинированное регулирование 1) Принцип разомкнутого управления: Алгоритм упр-ния строится только на основе алгоритма функционирования и не контролируется по фактическому значению управляемой величины х. Близость x к U обеспечивается жесткостью характеристик систем. При наличии воздействия f величины х может заметно отклониться от заданной, при этом алгоритм управления станет непригодным. 3) Принцип компенсации (регулирование по возмущению): f = F(g,f) g = F1(f) f = 0 – в установившемся режиме по принципу компенсации (отклонение должно отсутствовать) При сравнении системы регулирования по возмущению с системой управления, то 1-ая отличается большей устойчивостью и быстродействием от 2-ой системы. Недостаток: возможно компенсировать только те возмущения, которые мы можем измерить. Поэтому весьма эффективно во многих объектах применение комбинированного управления (1-ое+2-ое). Пример: управление генераторами на эл/станции. 5 1) Основные принципы регулирования. Принцип компенсации В основе алгоритма упр-ния заложены 3 фундаментальных принципа: 1) Принцип разомкнутого управления; 2) Принцип обратной связи; 3) Принцип компенсации (регулирование по возмущению); 3) Принцип компенсации (регулирование по возмущению): f = F(g,f) g = F1(f) f = 0 – в установившемся режиме по принципу компенсации (отклонение должно отсутствовать) При сравнении системы регулирования по возмущению с системой управления, то 1-ая отличается большей устойчивостью и быстродействием от 2-ой системы. Недостаток: возможно компенсировать только те возмущения, которые мы можем измерить. 2) Статическое и астатическое регулирование. Системы стабилизации, программного управления и следящие системы можно разделить на 2 группы: 1 – статические; 2 - астатические; 1) 2) САР будет статической по отношению к возмущающему или управляющему воздействиям, постоянной величине, отклонению регулируемой величины. САР явл-ся астатической по возмущению и управляющему воздействию, если при стремлении возмущающего управ. воздействия постоянной величины отклонения регулируемая величина стремится к нулю и не зависит от величины приложенного воздействия. Одна и та же САР может быть астатической по управлению и статической по возмущению, либо наоборот. 6 1)Классификация САУ. Системы стабилизации САУ в зависимости от характера управляющего воздействия делится на 3 класса: система стабилизации; система программного регулирования; следящая система; 1). В процессе работы системы стабилизации управляющее воздействие остается величиной постоянной. Основной задачей системы остается поддержание на постоянном уровне с допустимой ошибкой величины независимо от действующих возмущений. Отклонение регулируемой величины явл-ся хар-ным для систем стабилизации и позволяет дать качественную оценку систем этого класса. = X2(t2) – X1(t1) Система стабилизации явл-ся различного рода САУ, преднозначенные для регулирования скорости, напряжения, давления и т.д. 2) Классификация САУ. Следящие системы. Следящая системаУправляющее воздействие явл-ся величиной переменной, матем. Описание его во времени не может быть установлено, т.е. неизвестен источник сигнала. Т.к. следящая система предназначена для воспроизведения на выходе управляющего воздействия с возможно большей точностью, то ошибка явл-ся характерной, по которой можно судить о динамических св-вах следящих систем.Ошибка в следящей системе – это сигнал, в зависимости от величины которого осуществляется управление исполнительного устройства объекта. 7 1).Классификация САУ. Системы программного управления. Классификация САУ. САУ в зависимости от характера управляющего воздействия делится на 3 класса: система стабилизации; система программного регулирования; следящая система; 2). система программного регулирования. Управляющее воздействие изм-ся по заранее установленному закону. Системы программного управления явл-ся системами воспроизведения. В этих системах основной задачей явл-ся по возможности более точное воспроизведение управляющего воздействия на выходе в виде соответствующих изменений управляемой величины. О точности упр-ющего воздействия системы судят по величине ошибки, к-рая определяется как разность м/у управляющим воздействием и регулируемой величиной в данный момент времени.  = g(t1) – X(t1) – ошибка в момент времени t1. Системой программного управления может служить любая копировальная система. 2) Типовые нелинейные звенья 1.звено релейного типа 2. звено с кусочно-лминейной характеристикой 3. звено с криволинейной характеристикой 4. звено уравнение которого содержит произведение переменных или их производных и другие их комбинации 5. неленейный импульсный элемент логическое звено звенья описываемые кусочно-линейными диф-ми уравнениями, в том числе переменной структуры. 8 1) САР непрерывно импульсного и релейного действия. В зависимости от вида сигнала различаются непрерывные, релейные (нелинейные) и импульсные САР. Особенностью непрерывной САР явл-ся то, что во всех элементах системы входные и выходные сигналы непрерывны. К числу непр-ных систем относятся системы с гармонической циркуляцией. При этом для передачи могут исп-ся амплитудное модулирование, частотное мод-е и фазовое мод-е колебаний. Если структуре САР имеется хотя бы один элемент с нелинейной характеристикой, то такя система наз-ся релейной. 2)Показатели качества процессов регулирования. 1) Перерегулирование – это отношение разности σ = (Xmax – Xуст)/ Xусn*100% перерегулирование характеризует колебания системы. Допустимый предел (25…30)% 2) Время регулирования характеризует быстроту уравновешивания системы. tрег принимаем за момент окончания переходного процесса.(допускается отклонение ±5%) 3) Число колебаний регулируемой величины в течении времени переходного процесса. tрегулир характеризует колебания системы. (допускается не более 3-х полных колебаний) Дополнительные показатели качества: 1) Собственная частота колебаний системы 2) Логарифмический декремент затухания 3) Максимальная скорость сигнала на входе Для замкнутой САР, имеющий колебательный переходный процесс, на основе указанных показателей качества можно установить область допустимых отклонений регулируемой величины. 9 1) Требования, предъявляемые к динамическим свойствам САУ Изменение неизменной величины во времени определяет переходный процесс и представляет собой динамическую характеристику по которой можно судить о качестве работы системы. Чтобы качественно выполнять задачу регулирования в различных условиях система должна обладать определенным запасом устойчивости, а также точн., кач. 2) Устойчивость импульсных систем. Критерий Раусса-Гурвица. Устойчивость линейных систем В процессе работы на систему действуют различные возмущающие силы, вызывающие ее отклонение от заданного закона движения. Если под влиянием возмущения система отклонилась от состояния равновесия и после прекращения действия внешнего возмущения снова вернулась в исходное состояние, то такая система устойчива. Если под влиянием внешнего возмущения система будет отклоняться от состояния равновесия, а после прекращения действия возмущения система не возвращается в исходное состояние, а удаление системы с течением времени возрастает, то такая система называется неустойчивой. В линейных системах отклонение при неустойчивом движении будет неограниченно возрастать. Необходимое и достаточное условие устойчивости является выполнение требования, в соответствии с которым характеристическое уравнение системы должно иметь отрицательную вещественную часть. Наличие среди корней характеристического уравнения хотя бы одного корня с положительной вещественной частью свидетельствует о невыполнении этого условия, т.е. приводит к неустойчивости системы. Устойчивость в линейной системе характеризуется затуханием переходного процесса. Т.к. затухание переходного процесса в свою очередь определяется только корнем характеристического уравнения и не зависит от воздействия, то устойчивость является внутренним свойством линейной системы. Для определения устойчивости системы необходимому и достаточному условию нужно уметь находить корни характеристического уравнения. Это можно сделать просто для уравнения 1-го и 2-го порядков. Реальные системы десятых, сотых порядков. Поэтому для анализа устойчивости без нахождения корней характеристического уравнения, используют критерии устойчивости. КРИТЕРИЙ УСТОЙЧИВОСТИ РАУСА-ГУРВЕЦА Необходимым и достаточным условием устойчивости системы любого порядка без решения характеристического уравнения, по рассмотрению его коэффициентов, были сформулированы учеными Раусом и Гурвицом. Руас сказал, что для выполнения условия устойчивости, а следовательно для расположения всех корней характеристического уравнения в левой полуплоскости , необходимо и достаточно, чтобы все коэффициенты характеристического уравнения были больше нуля. Гурвец дополнил, что для выполнения условия устойчивости, а следовательно, для расположения вех корней характеристического уравнения в левой полуплоскости, необходимо и достаточно, чтобы все n диагональных миноров матрицы были положительны.   Критерий устойчивости Рауса и Гурвеца является алгебраическим, т.к. при их использовании задача определения знаков вещественных частей хар. уравнения сводится к выполнению общих алгебраических операций. |