Шпоры ЛСАР. 1 1 Основные понятия и определения тау
 Скачать 421.5 Kb. Скачать 421.5 Kb.
|

|
22 1) Построение логарифмических характеристик последовательно соединенных типовых динамических звеньев Пусть передаточная функция части системы  Подставив вместо S jω найдем модуль, затем логарифмируя, найдем выражение   Эти формулы показывают, что результирующие характеристики определяются суммой логарифмических и фазовых характеристик типовых звеньев. 2)ЛЕКЦИИ 23 1) Основные показатели качества системы Правильно спроектированная САР должна отвечать указанной точности и плавности протекания процесса, под влиянием управляющего или возмущающего воздействия. Пусть эта система находится в состоянии переходного процесса. На вход подаем единичное возмущение (g(t) = 1(t)); управляющий сигнал на выходе Известно, что Хвын(t) определяет точность САР, а xсв(t) влияет на показатели переходного процесса Показатели качества процесса регулирования: 1) Перерегулирование – это отношение разности σ = (Xmax – Xуст)/ Xусn*100% перерегулирование характеризует колебания системы. Допустимый предел (25…30)% 2) Время регулирования характеризует быстроту уравновешивания системы. tрег принимаем за момент окончания переходного процесса.(допускается отклонение ±5%) 3) Число колебаний регулируемой величины в течении времени переходного процесса. tрегулир характеризует колебания системы. (допускается не более 3-х полных колебаний). 24 1)Характеристики динамических звеньев Частотные характеристики Рассмотрим передаточную функцию, состоящую из n-го количества элементов. Последовательность выражений позволяет найти амплитуду и фазу колебаний на выходе системы при гармоническом воздействии на ее входе. Модуль этого выражения показывает, во сколько раз увеличивается или уменьшается амплитуда колебаний на выходе системы по сравнению с амплитудой колебаний на входе. Аргумент вектора F(jω) описывает фазовый угол колебаний по отношению колебаниям на входе => (*) определяет частотную характеристику, называемую амплитудно-фазовой частотной характеристикой (АФЧХ). АФЧХ строится на комплексной плоскости АФЧХ: Вещественные или мнимые частотные характеристики связаны с АЧХ и ФЧХ следующим образом:  При анализе САР на устойчивость и качества процесса регулирования, а также при решении других задач, часто обращаются к ЛЧХ Усиление L(ω) = 20lg|Ф(jω)| = 20lgA(ω) [дБ] – является единицей логарифмической относительно величины. Изменения относительно двух величин в 10 раз соответствует изменению усиления на 20 дБ. Известно, что АЧХ представляет собой отношение 2-х амплитуд: входного и выходного сигналов. 25 2) Статическое и астатическое САР. Системы стабилизации, программного управления и следящие системы можно разделить на 2 группы: 1 – статические; 2 - астатические; 1) 2) 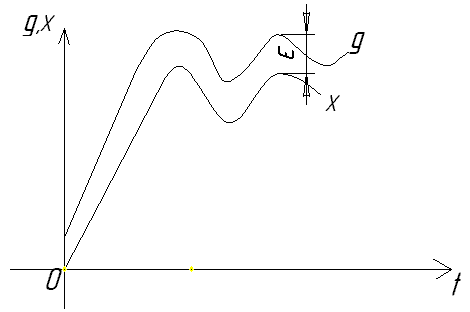 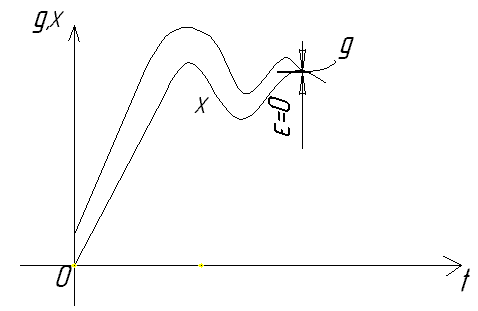 САР будет статической по отношению к возмущающему или управляющему воздействиям, постоянной величине, отклонению регулируемой величины. САР явл-ся астатической по возмущению и управляющему воздействию, если при стремлении возмущающего управ. воздействия постоянной величины отклонения регулируемая величина стремится к нулю и не зависит от величины приложенного воздействия. Одна и та же САР может быть астатической по управлению и статической по возмущению, либо наоборот. 26 1. Нелинейной системой автоматического управления наз-ся такая система которая содержит хотябы одно звено описываемое нелинейным уравнением. В применении к нелинейности состоит Пусть передаточная функция замкнутой системы будет представлена W(S)=K(S)/D(S) в этом случае диф уравнение замкнутой нелинейной САР можно представить D(S)X(S)+K(S)D(X)=0 Пусть функция f(x) однозначная функция, заменяем ее суммой линейной функции не линейных слагаемых: f(x)=c(x)+µφ(x) выбираем с таким чтобы уравнение при µ=0 имело следующий вид [D(S)+CK(S)]X=0 Решение этого уравнения имело бы чисто мнимые корни, вот такая линеаризация называется эквивалентной. 2. Построение желаемой ЛАХ. Ж. ЛАХ опред. показ. кач. и точн. проц. регулир. Низночастот. ее часть обусл. точн. воспро. медл. измен. возд. По ней можно опред. добротность по скорости и добротность по ускорению, а также статич. ошибку. Частота среза системы опред. с помощью номограмм Солодникова. По перерегулированию опред. вещ. чать САР, а по вещ. части наход. время регулир.: tрег.=kπ/ωсреза, k-коэф. Найдя tрег. можно опред. частоту среза ωсреза. Для наиб. простой реализ. послед. корректир. устройства изломн. накл. жел. ЛАХ (низкочатс.) и ЛАХ желаем. части совпад. ε(t)=ω3/Dω+ ε3/Dε, ωk=Dω, ωl=Dε^0.5, ω=1/T, tрег.=4,2π/ωсреза, Wустр.=Wжел.-Wнеизм. 27 1) Синтез САР Сущность задачи синтеза законов состоит в следующем: Такой выбор структурной схемы САР, а также ее параметров, ее конструктивное решение, при которой обеспечивается требуемые показатели качества и точности процесса регулирования, а сама САР состоит из наиболее простых устройств управления. Вс. САР можно разделить на: - объект регулирования (исполнительное устройство, усилитель мощности и измерительные устройства) Все это неизменная часть САР - корректирующие устройства и усилители – это изменяемая часть В значительной степени определяющей при выборе устройств неизменяемой части является стоимость, надежность, масса и габаритные размеры. Порядок синтеза: составляется упрощенная структурная схема , выбирается место и схема, включающая корректор и усилители устройств по критерию качества или требованию показателей качества и точности регулирования подбирают желаемую логарифмическую частотную характеристику разомкнутой САР Определяют тип и параметры корректирующих устройств САР и составляют окончательную схему САР Определяют динамические характеристики системы и сравнивают их с соответствующими данными технических условий Приведенный порядок синтеза может привести к неоднозначности решения задачи. 2) Устойчивость импульсных систем Необходимо и длстаточно что бы полюсы ее передаточной функции распологались в левой полуплоскости комплексной переменной S. Таким образом импульсная система устойчива если, все корни ее характерестического уравнения лежат внутри круга единичного радиуса. КРИТЕРИЙ УСТОЙЧИВОСТИ РАУСА-ГУРВЕЦА Необходимым и достаточным условием устойчивости системы любого порядка без решения характеристического уравнения, по рассмотрению его коэффициентов, были сформулированы учеными Раусом и Гурвицом. Руас сказал, что для выполнения условия устойчивости, а следовательно для расположения всех корней характеристического уравнения в левой полуплоскости , необходимо и достаточно, чтобы все коэффициенты характеристического уравнения были больше нуля. Гурвец дополнил, что для выполнения условия устойчивости, а следовательно, для расположения вех корней характеристического уравнения в левой полуплоскости, необходимо и достаточно, чтобы все n диагональных миноров матрицы были положительны.   Критерий устойчивости Рауса и Гурвеца является алгебраическим, т.к. при их использовании задача определения знаков вещественных частей хар. уравнения сводится к выполнению общих алгебраических операций. Принадлежность корней к кругу еденичного радиуса может быть установлена при помощи критерия Шур- Кона. До некоторой степени он анологичен критерию Гурвица, однако при его использование необходимо состовлять и анализировать определитель вплоть до до определителя порядка 2п*2п, где п порядок характеристического уравнения. 28 1) Критерий устойчивости найквеста Этот критерий является графическим критерием. Правила, с помощью которых можно установить по АФЧХ разомкнутой системы необходимое и достаточное условие замкнутой системы. Если разомкнутая система устойчива, то для устойчивости системы в замкнутом состоянии необходимо и достаточно, чтобы АФЧХ разомкнутой системы не охватывала на действительной оси координат от -1, j0. Второй случай соответствует неустойчивой САР. Эта точка называется критической. Если же АФЧХ проходит через точку (-1; j0), то САР будет находиться на границе устойчивости. Если неустойчивая система имеет в правой полуплоскости петлю, то эта система будет устойчива в замкнутом состоянии и если АФЧХ разомкнутой системы описываемая концом вектора 1+W, при возрастании частоты от нуля до ∞ стрелка вектора обойдет критическую точку против часовой стрелки k раз. Это является необходимым и достаточным условием.  29 1)Изменение неизменной величины во времени определяет переходный процесс и представляет собой динамическую характеристику по которой можно судить о качестве работы системы. Чтобы качественно выполнять задачу регулирования в различных условиях система должна обладать определенным запасом устойчивостим 2) Устойчивость линейных систем В процессе работы на систему действуют различные возмущающие силы, вызывающие ее отклонение от заданного закона движения. Если под влиянием возмущения система отклонилась от состояния равновесия и после прекращения действия внешнего возмущения снова вернулась в исходное состояние, то такая система устойчива. Если под влиянием внешнего возмущения система будет отклоняться от состояния равновесия, а после прекращения действия возмущения система не возвращается в исходное состояние, а удаление системы с течением времени возрастает, то такая система называется неустойчивой. В линейных системах отклонение при неустойчивом движении будет неограниченно возрастать. Необходимое и достаточное условие устойчивости является выполнение требования, в соответствии с которым характеристическое уравнение системы должно иметь отрицательную вещественную часть. Наличие среди корней характеристического уравнения хотя бы одного корня с положительной вещественной частью свидетельствует о невыполнении этого условия, т.е. приводит к неустойчивости системы. Устойчивость в линейной системе характеризуется затуханием переходного процесса. Т.к. затухание переходного процесса в свою очередь определяется только корнем характеристического уравнения и не зависит от воздействия, то устойчивость является внутренним свойством линейной системы. Для определения устойчивости системы необходимому и достаточному условию нужно уметь находить корни характеристического уравнения. Это можно сделать просто для уравнения 1-го и 2-го порядков. Реальные системы десятых, сотых порядков. Поэтому для анализа устойчивости без нахождения корней характеристического уравнения, используют критерии устойчивости. КРИТЕРИЙ УСТОЙЧИВОСТИ РАУСА-ГУРВЕЦА Необходимым и достаточным условием устойчивости системы любого порядка без решения характеристического уравнения, по рассмотрению его коэффициентов, были сформулированы учеными Раусом и Гурвицом. Руас сказал, что для выполнения условия устойчивости, а следовательно для расположения всех корней характеристического уравнения в левой полуплоскости , необходимо и достаточно, чтобы все коэффициенты характеристического уравнения были больше нуля. Гурвец дополнил, что для выполнения условия устойчивости, а следовательно, для расположения вех корней характеристического уравнения в левой полуплоскости, необходимо и достаточно, чтобы все n диагональных миноров матрицы были положительны. Критерий устойчивости Рауса и Гурвеца является алгебраическим, т.к. при их использовании задача определения знаков вещественных частей хар. уравнения сводится к выполнению общих алгебраических операций. 30 1) Статическое и астатическое регулирование. Системы стабилизации, программного управления и следящие системы можно разделить на 2 группы: 1 – статические; 2 - астатические; 1) 2) САР будет статической по отношению к возмущающему или управляющему воздействиям, постоянной величине, отклонению регулируемой величины. САР явл-ся астатической по возмущению и управляющему воздействию, если при стремлении возмущающего управ. воздействия постоянной величины отклонения регулируемая величина стремится к нулю и не зависит от величины приложенного воздействия. Одна и та же САР может быть астатической по управлению и статической по возмущению, либо наоборот 2) Показатели качества процесса регулирования: 1) Перерегулирование – это отношение разности σ = (Xmax – Xуст)/ Xусn*100% перерегулирование характеризует колебания системы. Допустимый предел (25…30)% 2) Время регулирования характеризует быстроту уравновешивания системы. tрег принимаем за момент окончания переходного процесса.(допускается отклонение ±5%) 3) Число колебаний регулируемой величины в течении времени переходного процесса. tрегулир характеризует колебания системы. (допускается не более 3-х полных колебаний) 1) Собственная частота колебаний системы 2) Логарифмический декремент затухания 3) Максимальная скорость сигнала на входе Для замкнутой САР, имеющий колебательный переходный процесс, на основе указанных показателей качества можно установить область допустимых отклонений регулируемой величины. 31 2) Устойчивость импульсных систем Необходимо и длстаточно что бы полюсы ее передаточной функции распологались в левой полуплоскости комплексной переменной S. Таким образом импульсная система устойчива если, все корни ее характерестического уравнения лежат внутри круга единичного радиуса. КРИТЕРИЙ УСТОЙЧИВОСТИ РАУСА-ГУРВЕЦА W*(s)=H*(s)/G*(s). Для уст. замкн. имп. системы необх., чтобы z=e^q=(η+1)/(η-1). Полином G*(s)=a0+(a1)e^q+…+(an)e^(nq) в этом случ. можно преобраз. так, чтобы он отображ. внутри единич. круга в пл. z на лев. полупл. η. Поэтому усл. |z|<1 будет соотв. усл., что действ. Re(η)<0. 32 1) Классификация САУ. Следящие системы САУ в зависимости от характера управляющего воздействия делится на 3 класса: система стабилизации; система программного регулирования; следящая система; . Следящая система Управляющее воздействие явл-ся величиной переменной, матем. Описание его во времени не может быть установлено, т.е. неизвестен источник сигнала. Т.к. следящая система предназначена для воспроизведения на выходе управляющего воздействия с возможно большей точностью, то ошибка явл-ся характерной, по которой можно судить о динамических св-вах следящих систем. Ошибка в следящей системе – это сигнал, в зависимости от величины которого осуществляется управление исполнительного устройства объекта. 2)Типовые нелинейные звенья 1.звено релейного типа 2. звено с кусочно-лминейной характеристикой 3. звено с криволинейной характеристикой 4. звено уравнение которого содержит произведение переменных или их производных и другие их комбинации 5. неленейный импульсный элемент 6. логическое звено 7. звенья описываемые кусочно-линейными диф-ми уравнениями, в том числе переменной структуры. |