Диплом. Сацицкий. 1 анализ силовых схем российских электровозов с асинхронным тяговым приводом
 Скачать 6.03 Mb. Скачать 6.03 Mb.
|

|
2 СОЗДАНИЕ КОМПЬЮТЕРНЫХ МОДЕЛЕЙ СИЛОВОЙ СХЕМЫ ЭЛЕКТРОВОЗА 2.1 Компьютерное моделирование в Matlab Simulink Развитие методов и средств компьютерного моделирования всегда происходило в направлении упрощения диалога человека с вычислительной (моделирующей) системой, приближения языка программирования задачи к инженерному. В последнее время широкое распространение получил визуальный или графический подход к программированию. В некоторой степени этот подход напоминает программирование для аналоговых вычислительных машин, которые были широко распространены в 60–х годах прошлого столетия. Аналоговые решающие элементы, выполняющие определенные математические операции над переменными, соединялись между собой в соответствии со структурой уравнения или другого способа определения задачи, вводились сигналы, определяющие внешние воздействия на исследуемую систему и необходимые начальные условия для переменных. После этого регистрировался переходный процесс, происходящий в полученной электронной системе после ее включения, который являлся решением поставленной задачи. В современных программных комплексах моделирования, использующих визуальный (графический) подход к программированию, виртуальная модель решаемой задачи формируется на экране дисплея в виде структурной схемы из виртуальных решаемых элементов, имеющихся в библиотеке программной системы, или создаваемых пользователем, последующего соединения элементов между собой виртуальными проводниками. Виртуальные решающие элементы представляют собой фрагменты программ выполнения соответствующих математических операций, написанные на языке высокого уровня с использованием методов автоматизации программирования. Процедуре создания на экране дисплея структурной схемы решаемой задачи соответствует формирование полной программы решения задачи, которая в зависимости от сложности проблемы может насчитывать десятки и сотни тысяч команд. Пользователь освобождается от необходимости составления и отладки сложной программы и даже может не владеть в совершенстве методами программирования на языках высокого уровня. Средства графического (визуального) программирования позволяют вводить описание моделируемой системы в естественной для пользователя, преимущественно графической форме, автоматически переводить это описание на язык компьютера и 5 представлять результаты моделирования опять же в графической форме, например в виде временных или фазовых диаграмм и анимированных картинок. Трудоемкость и время разработки модели и проведения вычислительных экспериментов в таких средах сокращаются в десятки раз по сравнению с традиционным способом, когда для каждой новой разработки создается индивидуальная программа. Относительная дешевизна графических сред визуального моделирования и простота их эксплуатации делают компьютерное моделирование доступным для каждого инженера, технолога и менеджера. В настоящее время существует несколько десятков графических сред визуального моделирования, среди них можно выделить следующие: - Приложение SIMULINK, работающее на базе программного комплекса MATLAB фирмы The MathWorks Inc. Используется для проектирования систем управления, цифровой обработки сигналов, коммуникационных систем. - Комплекс LabVIEW фирмы National Instruments. Используется в системах сбора и обработки данных, а также для управления техническими объектами и технологическими процессами. - Программный комплекс Electronics Workbench (Multisim) фирмы Interactive Image Technologies Ltd. Используется для моделирования электронных схем и решения задач автоматизации проектирования. - Программный комплекс FEMLAB(COMSOL MULTIPHYSICS). Используется для моделирования систем с распределенными параметрами, которые описываются интегро-дифференциальными уравнениями в частных производных, с использованием метода конечных элементов. Может работать совместно с комплексом MATLAB или автономно. Программа SIMULINK является приложением к пакету MATLAB. В определенном смысле SIMULINK можно рассматривать как самостоятельный продукт фирмы MathWorks, однако он работает только при наличии ядра MATLAB и использует многие функции, входящие в его состав. Следует отметить, что пакет MATLAB ориентирован в первую очередь на обработку массивов данных (матриц, векторов и т.п.). Это позволяет существенно повысить эффективность процедур, работающих с указанными типами данных, по сравнению с языками программирования «общего назначения» (Pascal, С и т.п.), и существенно отличает MATLAB от других систем, таких, как MAPLE, MathCAD, Mathematica. Векторная обработка данных обеспечивает высокую скорость вычислений, в большинстве случаев избавляет пользователя от написания циклов и гарантирует необходимую точность. Приложение SIMULINK является инструментом, с помощью которого можно объединять блоки, соответствующие отдельным элементам динамической системы в единое целое и изучать их поведение во времени. Разработка моделей средствами SIMULINK (S-модели) основана на технологии drag-and-drop («перетащи и оставь»). Для построения S-модели используются модули (или блоки), хранящиеся в библиотеке SIMULINK. Библиотека SIMULINK хороша тем, что, с одной стороны, обеспечивает пользователю доступ ко всем основным возможностям пакета MATLAB, а с другой – является достаточно самостоятельной его компонентой, в том смысле, что при работе с ней не обязательно иметь навыки в использовании других инструментов, входящих в состав пакета. Блоки, включаемые в создаваемую модель, могут быть связаны друг с другом как по информации, так и по управлению. Вид связи зависит от типа блока и логики работы модели. Данные, которыми обмениваются блоки, могут быть скалярными величинами, векторами или матрицами произвольной размерности. Любая S-модель может иметь иерархическую структуру, т.е. состоять из моделей более низкого уровня, причем число уровней иерархии практически не ограничено. Наряду с другими параметрами моделирования пользователь может задавать способ изменения модельного времени (с постоянным или переменным шагом), а также условия окончания моделирования. В ходе моделирования имеется возможность наблюдать за процессами, происходящими в системе. Для этого используются специальные «смотровые окна», входящие в состав библиотеки SIMULINK. Интересующие пользователя характеристики могут быть представлены как в числовой, так и в графической форме. Применение принципов структурного и модульного программирования позволяет представлять различные алгоритмы в виде набора унифицированных программных модулей, что улучшает обозримость программы, облегчает ее отладку и в конечном счете уменьшает общий объем программного обеспечения, подлежащего разработке. Кроме этого состав библиотеки SIMULINK может быть пополнен пользователем за счет разработки собственных блоков. В последующих разделах будут рассмотрены типовые решающие элементы, приведены структурные схемы распространенных систем базисных функций, основные блоки, реализующие методы аппроксимации сигналов и моделирования динамических систем. Следует отметить, что в составе MATLAB имеется множество других приложений, основанных на методах графического (визуального) программирования, допускающих совместную работу с приложением SIMULINK. Программа Simulink запускается с помощью кнопки (Simulink) на панели инструментов командного окна Matlab (рисунок 1.1). Библиотека компонентов содержит большое количество элементов (блоков), необходимых для создания модели. Из программы Simulink библиотека вызывается с помощью кнопки (Library Browser), расположенной на панели инструментов. Внешний вид обозревателя окна библиотеки представлен на рисунке 2.1. 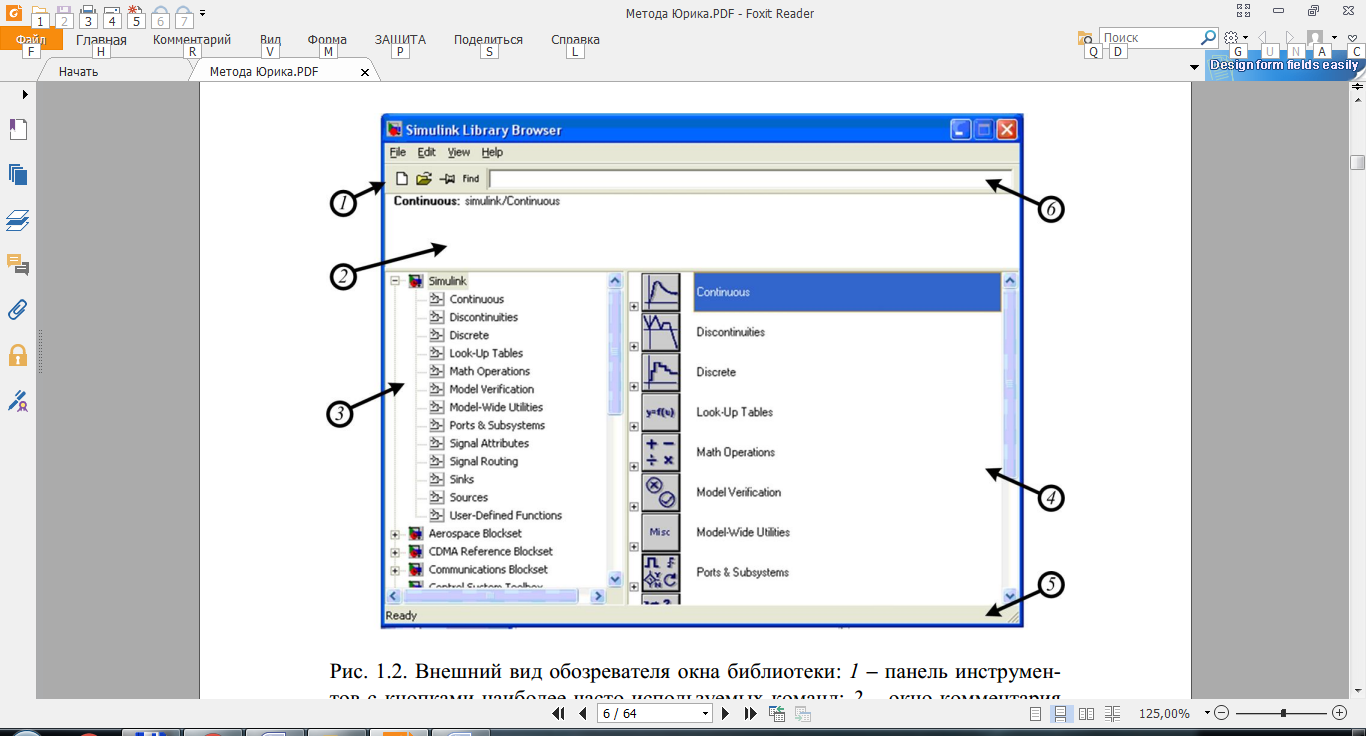 Рисунок 2.1 – Рабочее окно библиотеки Simulink: 1 – Команды быстрого доступа; 2 – Строка состояния; 3 – Подсистемы библиотеки; 4 – Компоненты библиотеки; 5 – Командная строка 2.2 Проектирование асинхронного двигателя в программе Matlab . Математическая модель двигателя состоит из двух частей: электромагнитной и электромеханической. Электромагнитная часть модели описывается системой дифференциальных уравнений во вращающейся системе координат, которые обозначены через d и q:  , ,  , ,   , ,  ; ;(2.1)  , ,  , ,   , ,  . .Этому математическому описанию соответствуют схемы замещения асинхронной машины в осях d и q, показанные на рисунке 2.2.  Рисунок 2.2 – Схемы замещения асихронной машины: а) в осях d; б) в осях q Электромеханическая часть машины описывается уравнениями:    Описание и размерность параметров, входящих в уравнения (2.1) и (2.2), представлены в таблице 2.1. Таблица 2.1 – Параметры асинхронного двигателя
В качестве источника питания виртуального асинхронного двигателя применяются три элемента AC Voltage Source. Этот блок обеспечивает получение синусоидального напряжения с постоянной амплитудой. Выбирается значение напряжения 1860 В (Реак Amplitude), частота 50 Гц (Frequency), а также оставание фазных напряжений на 120 эл. град Phase. Для этого выбираются начальные значения фаз напряжения 0, 120 и 240 эл. град. соответственно. Параметр Sample time – шаг дискретизации. С помощью этого параметра задается шаг дискретизации по времени выходного напряжения источника при создании дискретных моделей. Measurments – измеряемые переменные. Задаются переменные, передаваемые для измерения в блок Multimeter или для наблюдения с помощью блока Scope. Значение параметра выбирается из списка: - None – переменные не отображаются; - Voltage – отображается выходное напряжение источника. Блок является идеальным источником напряжения и имеет нулевое внутреннее сопротивление. Окно настройки источников переменного напряжения изображено на рисунке 2.3. 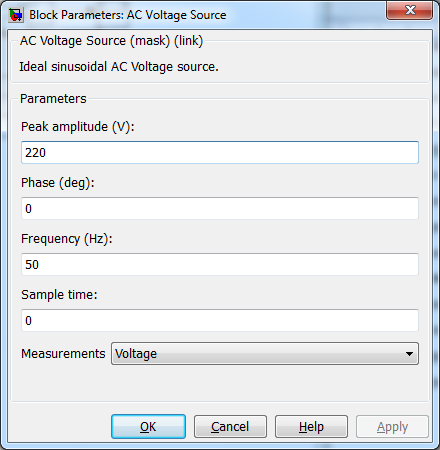 Рисунок 2.3 – Окно настройки элемента AC Voltage Source Элемент виртуального асинхронного двигателя в программе Matlab называется Asynchronous Machine SI Units. В параметрах этого элемента устанавливаем основные характеристики двигателя, установленные на электровозе 2ЭС5 (таблица 2.2). Порты модели А, В и С – выводы статорной обмотки машины. Порт Тт предназначен для получения момента сопротивления движению. На выходе порта т формируется векторный сигнал, состоящий из 21 элемента: токов, потоков и напряжений ротора и статора в неподвижной и вращающейся системах координат, электромагнитного момента, скорости вращения вала, а также его углового положения. Таблица 2.2 – Параметры асинхронного двигателя электровоза 2ЭС5
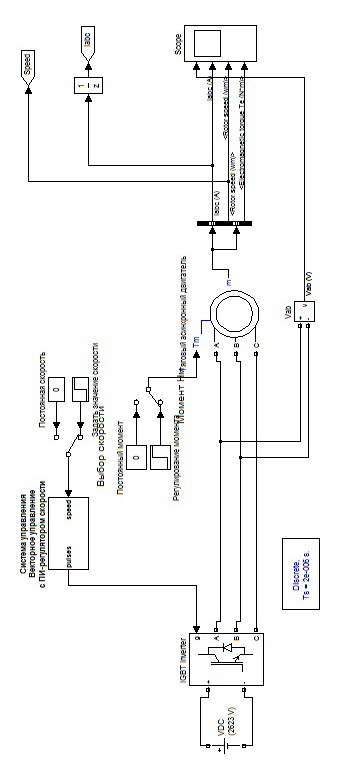
Окно ввода параметров виртуальной асинхронной машины показано на рисунке 2.4. 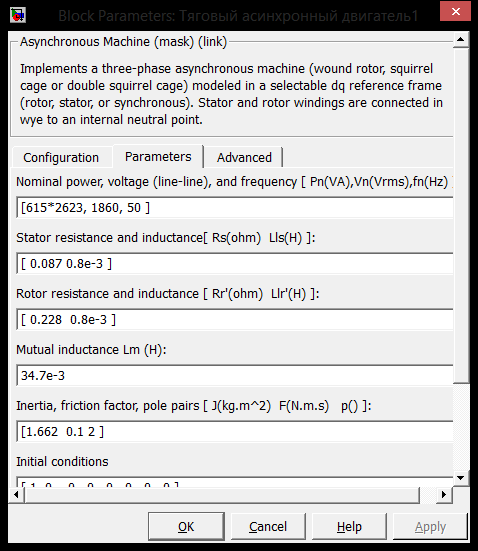 Рисунок 2.4 – Окно ввода параметров асинхронной машины В первом поле (Machine type) окна настройки параметров блока вводится тип машины. В остальных полях галочками отмечаются переменные состояния, которые выводятся для измерения. Во втором поле Preset model можно выбрать одну из моделей библиотеки или отказаться от выбора и ввести параметры собственной модели. Во втором поле (Mechanical input) в выпадающем списке можно выбрать два варианта: а) torque Tm (момент); Б) speed w (скорость). В первом случае асинхронная машина представляет собой источник скорости, а момент в ней компенсирует момент на валу (на входе Tm виртуальной модели). Во втором случае асинхронная машина представляет собой источник момента, а скорость в ней устанавливается равной заданной на входном порту. В третьем поле (Rotor type) выбирается либо короткозамкнутый ротор (Squirre-cage), либо фазный ротор (Wound). В четвертом поле (Reference frame) выбирается система координат, в которой измеряются переменные состояния машины. Здесь из выпадающего списка можно выбрать неподвижную систему координат, синхронно вращающуюся систему координат и систему координат вращающуюся со скоростью ротора. В остальные поля окна (при отмеченном поле Show detailed parameters) вводятся параметры модели в соответствии с математическим описанием. Для измерения переменных состояния машин переменного тока используется универсальный блок Measurement (рисунок 2.5). Начальные условия машины вычисляются при необходимости с помощью блока Powergui. Powergui установлен режим расчета на переменном токе (Phasor simulation). В этом случае значение параметра выбирается из списка: - magnitude – амплитуда (скалярный сигнал); - complex – комплексный сигнал; - real-imag – вектор, состоящий из двух элементов – действительной и мнимой составляющих сигнала; - magnitude-angle – вектор, состоящий из двух элементов – амплитуды и аргумента сигнала. Для извлечения переменных состояния из вектора измеряемых переменных электрической машины используется блок Machines Measurement Demux. Блок работает совместно с моделями синхронных и асинхронных машин. Окно задания параметров представлено на рисунке 2.5. 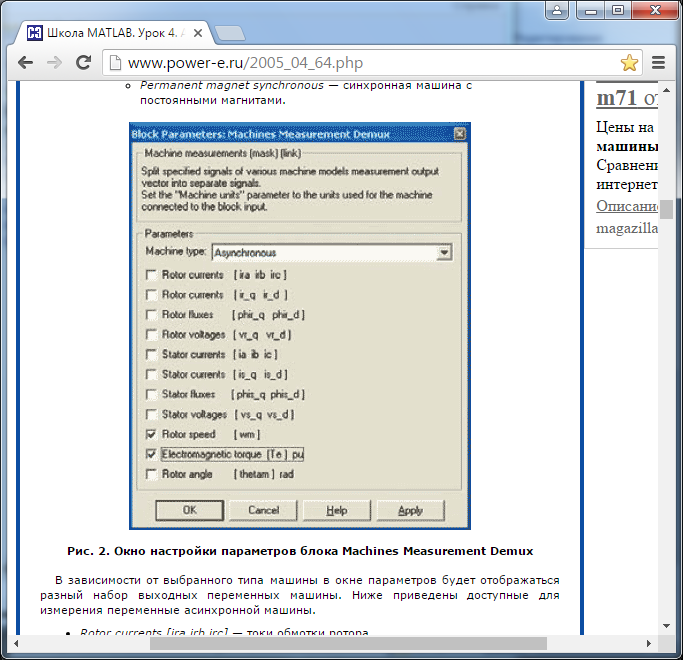 Рисунок 2.5 – Диалоговое окно настройки параметров блока Machines Measurement Demux Как видно из рисунка, в нашем случае будем измерять только скорость ротора (wm) и электромагнитный момент (Те). Для измерения линейного напряжения между фазами используется элемент Voltage measurement. Этот элемент измеряет мгновенное значение напряжения между двумя узлами цепи. На выходе блока имеется сигнал, который может использоваться любым блоком из Simulink. Построенная модель асинхронного двигателя представлена на рисунке 2.6.
Для построения схемы вызываются два окна: окно обозревателя библиотеки Simulink Library Browser кнопкой «Play» и окно модели через меню File/New/Model. Располагаются окна рядом на рабочем столе. В левой части окна обозревателя следует закрыть дерево Simulink, открыть дерево SimPowerSystems и активировать строку дерева Electrical Sources (источники электрической энергии), а затем поочередно все перечисленные выше разделы. Схема собирается по технологии «drag-and-drop». Для управления ключами используется генератор прямоугольных импульсов Pulse Generator, подключенный к управляющим электродам g идеальных ключей. Настройка схемы заключается в установке уровня напряжений источников, частоты и фазовых сдвигов, а также в выборе параметров асинхронного электродвигателя. У генератора Pulse Generator задается амплитуда 1 В, длительности периода 3 с и длительности импульса величиной 50% от длительности периода. Измерения осуществляются с помощью осциллографов Scope (раздел Sinks библиотеки Simulink), первый из которых подключен к порту т блока Machines Measurement Demux, второй — к фазам А и В асинхронного электродвигателя через измеритель напряжения Voltage Measurement из раздела Measurements (измерительные и контрольные устройства). Все настройки осциллографов были подробно рассмотрены в материалах предыдущих уроков. Модельное время Stop time, равное периоду импульсного сигнала 3 с, и максимальный шаг дискретизации Max step size (величина auto) устанавливаются в меню Simulation/Simulation parameters окна модели. Результаты моделирования в виде временных диаграмм представлены на рисунке 2.7 и 2.8. Видно, что в пределах 1,5 с электродвигатель разгоняется, а затем тормозится. Скорость ротора асинхронного электродвигателя при этом нарастает и спадает по экспоненциальному закону. 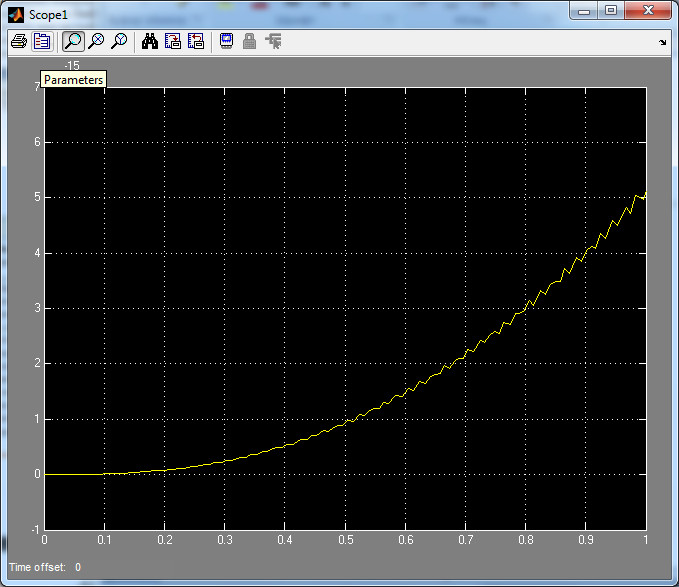 Рисунок 2.7 – График изменения числа оборотов ротора двигателя с течением времени 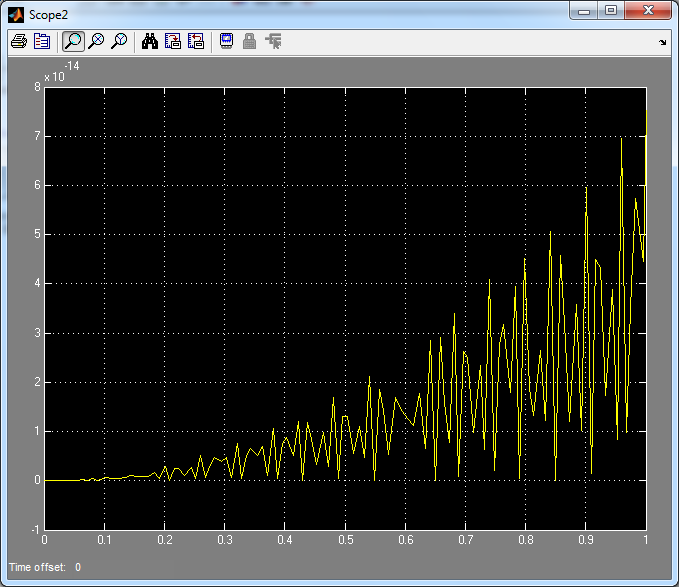 Рисунок 2.8 – График изменения значения электромагнитного момента двигателя с течением времени Из результатов моделирования видно, что при прямом пуске на холостом ходу и при приложении нагрузки наблюдаются значительные колебания момента и скорости. |
 .
. 
 .
.