геодезия экз. экз гео. 1. Форма и размеры Земли (физ поверхность, геоид, эллипсоид)
 Скачать 0.8 Mb. Скачать 0.8 Mb.
|

|
Классификация теодолитов По конструкции осевой системы они могут быть повторительными (лимб и алидада могут вращаться независимо друг от друга) и простыми (лимб жестко соединен и не вращается). По точности теодолиты классифицируются на: высокоточные – Т05, Т1; ошибка измерения угла ≤ 1˝ точные – Т2, Т5, Т5К;……………………………...≤ 5˝ технические – Т15, Т20, Т30………………………≤ 30 - 60˝. Отсчитывание по лимбам оптических теодолитов производится с помощью микроскопов, увеличение которых 10 - 70× и более.Применяемые в теодолитах микроскопы подразделяются на три вида: штриховые, шкаловые и микрометры. В первом типе цена деления делается по возможности меньшей, оценка десятых долей деления производится на глаз по штриху на пластинке в поле зрения микроскопа. В шкаловых микроскопах в поле зрения имеется шкала, длина которой равна длине наименьшего деления на лимбе, переданного в поле зрения микроскопа. Отсчет складывается из отсчета целых интервалов на лимбе (относительно нуля шкалы) и отсчета по шкале, отсекаемого штрихом лимба, находящимся на шкале. Микроскопы - микрометры используются в точных и высокоточных теодолитах. В их поле зрения имеется либо биссектор, либо противоположное изображение того же лимба. Отсчет складывается из отсчета по лимбу целых интервалов и отсчета по барабанчику микрометра после совмещения биссектора с определенным штрихом или бинарным делением лимба. Таким образом, при любом способе отсчитывания по лимбам отсчет можно выразить формулой: а=Νλ+Δλ, где Νλ – отсчет по лимбу целых делений до нулевого штриха, λ – цена деления лимба, то есть количество угловых единиц, содержащихся в одном его делении, Δλ – отсчет дробной части деления. 16,Измерение вертикальных углов.МОпорядок его определения и приведения к нулю. Вертикальный круг, служащий для измерения вертикальных углов, как и горизонтальный круг состоит из лимба и алидады. Его отличием является то, что алидада с отсчетным устройством связана с подставкой зрительной трубы и при измерении углов наклона неподвижна. Лимб же жестко связан с осью вращения зрительной трубы и вращается вместе с ней. Место нуля – это отсчет по вертикальному кругу, когда визирная ось трубы горизонтальна, а пузырек уровня при алидаде находится в нуль-пункте. ν =КЛ-МО; ν =МО-КП; ν =(Кл-КП)/2; МО =(КЛ+КП)/2. 0'0' – линия нулей алидады; ν – угол наклона (вертикальный угол); КЛ, КП – отсчеты по вертикальному кругу при положении зрительной трубы слева и справа.Для приведения МО к нулю вычисляют угол наклона (КЛ – КП):2, устанавливают на вертикальном круге отсчет равный этому углу наклона и вертикальными исправительными винтами сетки возвращают перекрестие в точку наводки, на которую была наведена визирная ось трубы. Место нуля в теодолите должно быть близким или равным нулю. Сначала определяют значение МО. Визируют на удаленную высокорасположенную точку при двух положениях вертикального круга, берут отсчет по лимбу вертикального круга. Затем вычисляют место нуля, угол наклона. Если значение МО не близко к 0°, на лимбе вертикального круга при помощи наводящего винта зрительной трубы устанавливают значение угла наклона. При этом перекрестие сетки нитей сместится с точки наведения. Возвращают его назад при помощи пары вертикальных исправительных винтов сетки нитей (исправление для теодолитов технической точности). 14.Поверки и юстировка теодолитов Поверка – это совокупность действий с геодезическими приборами, направленных на выявление геометрических нарушений в приборах. При этом сравнивают геометрическую схему исследуемого прибора с заводской схемой. Юстировка – есть совокупность действий с геодезическим прибором, направленных на устранение геометрических нарушений в приборе. В теодолитах правильность их геометрии определяется правильным расположением основных осей. Перед поверкой предварительно приводят основную ось вращения теодолита в вертикальное положение, то есть горизонтируют прибор. Устанавливают уровень параллельно двум подъемным винтам. Вращая их одновременно в разные стороны, приводят пузырек цилиндрического уровня на середину. Затем поворачивают алидаду на 90°, то есть устанавливают уровень по направлению третьего винта и его вращением опять приводят пузырек в нульпункт. После этого выполняют следующие поверки. 1.Ось цилиндрического уровня должна быть перпендикулярна основной оси вращения инструмента – uu  OО. Устанавливают уровень по направлению двух подъемных винтов и их вращением в противоположные стороны приводят пузырек в нульпункт, поворачивают алидаду на 180°: если пузырек остался в нульпункте, то условие выполнено, если сместился – необходимо исправление. Юстировка осуществляется исправительными винтами уровня: пузырек смещается ими к середине на половину схода и окончательно возвращается в нульпункт при помощи подъемных винтов. После исправления поверку повторяют. OО. Устанавливают уровень по направлению двух подъемных винтов и их вращением в противоположные стороны приводят пузырек в нульпункт, поворачивают алидаду на 180°: если пузырек остался в нульпункте, то условие выполнено, если сместился – необходимо исправление. Юстировка осуществляется исправительными винтами уровня: пузырек смещается ими к середине на половину схода и окончательно возвращается в нульпункт при помощи подъемных винтов. После исправления поверку повторяют.2.Визирная ось зрительной трубы должна быть перпендикулярна оси вращения зрительной трубы – VV SS. Иначе: зрительная труба не должна иметь коллимационной ошибки. Плоскость, проходящая через визирную ось отвесно, называется коллимационной. Поверка выполняется визированием на удаленную точку (100 – 200 м) при закрепленном лимбе и взятием отсчетов по лимбу горизонтального круга при двух положениях вертикального круга КП и КЛ. Полученные два отсчета должны отличаться ровно на 180°. Отклонение разности отсчетов от 180° равно двойному значению коллимационной ошибки.2с=аКЛ – (аКП±180°); с≤2t. Поверку необходимо выполнить несколько раз, чтобы избежать ошибок в определении ее значения. Юстировка производится установкой на лимбе горизонтального круга среднего отсчета при помощи наводящего винта алидады и последующим совмещением перекрестья сетки нитей с изображением выбранной точки путем вращения исправительных винтов сетки нитей. После исправления поверку нужно повторить. При измерениях ошибка может быть исключена измерением угла при двух положениях вертикального круга. 3,Горизонтальная ось вращения зрительной трубы должна быть перпендикулярна основной оси вращения прибора. SS OO.Поверка выполняется проектированием высокорасположенной точки (А) вниз при двух положениях вертикального круга. а' – проекция А при КП; а" – проекция А при КЛ. Если угол γ ≤ 2t или проекции точки А отличаются не более, чем на 0,5 ширины биссектора, то условие поверки выполнено. В противном случае инструмент нужно отправить в мастерскую. 4,Вертикальная нить сетки должна быть вертикальна (горизонтальная – горизонтальна) или горизонтальная нить сетки должна быть перпендикулярна основной оси вращения прибора – mm ОО. Поверка выполняется визированием вертикальной нитью на висящий отвес. При совпадении нитей отвеса и сетки условие поверки выполнено. Иначе выбирают точку на местности, удаленную не менее чем на 30 метров от теодолита, наводят на нее перекрестие сетки нитей и, работая наводящим винтом алидады, следят за перемещением сетки нитей по точке наводки. Если средняя нить сетки перемещается по точке наводки, то условие поверки выполнено. В противном случае отверткой ослабляют крепящие винты всего окуляра и поворачивают окуляр до требуемого положения. После этого закрепляют винты и повторяют поверки 2,4. 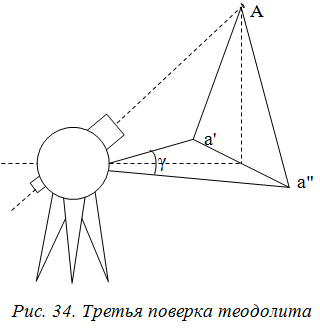 18. Теодолитная съемка: Полевые работы,камеральные Целью теодолитной съемки является получение контурного плана местности, то есть ситуации. Съемочным обоснованием для нее служат полигоны (или теодолитные ходы) замкнутой или разомкнутой формы. Полевые работы при теодолитной съемке заключаются в следующем: 1.Рекогносцировка (разведка) местности. Цель – ознакомиться с участком, оптимально выбрать и закрепить точки теодолитного хода, отыскать точки геодезической сети (или сети сгущения) с целью привязки. 2.Привязка теодолитного хода к опорной геодезической сети. 3.Угловые измерения (журнал). 4.Линейные измерения (журнал). 5.Съемка ситуации различными способами: перпендикуляров, полярных координат, линейных засечек, угловых засечек, створный и способ обмера. Все измеренные значения углов и расстояний заносят на абрис съемки. Абрис – это схематический чертеж, который составляют на глаз, не в масштабе. Он должен содержать полные сведения о снимаемой местности, числовые результаты съемки и пояснения: названия контуров, улиц, характер дорожных покрытий. Существуют два варианта ведения абриса – общий или постраничный, на каждую сторону полигона. Абрис является документом, который получают в результате полевых работ Камеральные работы 1)Вычерчивание плана теодолитной съемки. Снятые контуры наносят с абриса съемки теми же способами, которыми производилась съемка при помощи геодезического транспортира, поперечного масштаба и циркуля – измерителя. 2)Оформление плана в соответствии с условными знаками. 15. Способы измерения горизонтальных углов:Способ приемов. перед измерением угла теодолит устанавливают в вершине измеряемого угла и приводят в рабочее положение. Способ приемов заключается в том, что: 1). Теодолит устанавливают в вершине измеряемого угла и приводят в рабочее положении (центрируют и горизонтируют при помощи подъемных винтов) 2). Закрепляют лимб и при открепленной алидаде визируют на первую точку (В), расположенную справа от наблюдателя и берут отсчет по лимбу горизонтального круга вКП. 3). Открепляют алидаду, визируют на вторую точку (С) и берут по лимбу горизонтального круга второй отсчет сКП. 4). Вышеуказанные действия составляют первый полуприем. Вычисляют угол βКП=вКП – сКП. 5). Смещают лимб горизонтального круга грубо на 2°÷5° поворотом его наводящего винта, переводят трубу через зенит и выполняют второй полуприем при другом положении вертикального круга, повторяя действия 2).и 3). Получают βКЛ=вКЛ – сКЛ; если βКЛ – βКП ≤ 2t, то β=  . Результаты измерений записывают в журнал специальной формы . . Результаты измерений записывают в журнал специальной формы . При визировании на точки работают закрепительными и наводящими винтами алидады и зрительной трубы. Лимб должен быть закреплен и неподвижен. Лимб смещают после первого полуприема, чтобы измерения выполнялись на разных участках лимба и были независимы друг от друга. 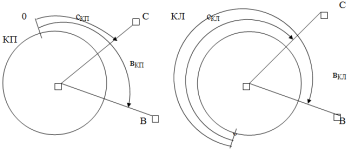 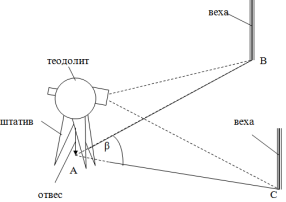 17. Факторы влияющие на точность измерения углов На точность измерения горизонтальных углов влияют как возможные ошибки прибора (ошибки отсчетного устройства, градуировки лимбов, фокусировки трубы, расположения отдельных частей прибора), так и условия производства работ (квалификация исполнителя, погодно – климатические условия, растительность, рельеф и т.д.). Точность измерения углов теодолитом зависит от инструментальных ошибок и ошибок центрирования прибора и визирных целей. Инструментальные ошибки: 1. Неперпендикулярность оси вращения трубы SS и основной оси ОО. Ее влияние исключают путем измерения углов при КП и КЛ. 2. Коллимационная ошибка за счет неперпендикулярности визирной оси VV и оси вращения трубы SS. Она исключается путем измерения углов при двух положениях вертикального круга. 3. Ошибка визирования - ее полностью исключить нельзя, она зависит от качества зрительной трубы. 4. Ошибка отсчитывания по лимбам - ее величина зависит от точности отсчетного приспособления. 19.Теодолитная съемка: Способы съемки ситуации Съемка ситуации различными способами: перпендикуляров, полярных координат, линейных засечек, угловых засечек, створный и способ обмера. Способ перпендикуляров (прямоугольных координат) заключается в следующем. На стороне теодолитного хода измеряют при помощи рулетки расстояние до осевой точки перпендикуляра. Затем строят в ней прямой угол и на полученном направлении измеряют расстояние до снимаемой точки. Длина перпендикуляров не должна превышать 4 м, 6 м, 8 м соответственно для съемок в масштабах 1:500, 1:1000, 1:2000, в этом случае их строят на глаз. При большей длине перпендикуляра прямой угол строят при помощи экера или теодолита. При съемке способом полярных координат из точки теодолитного хода (2) измеряют горизонтальный угол теодолитом до направления на снимаемую точку и расстояние до нее. Измеряемые длины не должны превышать 40, 60 и 100 метров для тех же масштабов. Способ линейных засечек заключается в измерении расстояний от точек теодолитного хода до снимаемой точки. Измеряемые длины не должны превышать длины мерного прибора. Измерив два горизонтальных угла от стороны теодолитного хода до направления на точку местности, снимают точку способом угловых засечек. Значения измеряемых углов не должны быть менее 30° и более 150°. В случае, когда точка местности находится на стороне теодолитного хода или на ее продолжении, ее снимают створным способом: измеряют расстояние от ближайших точек теодолитного хода. Сняв две точки контура одним из вышеперечисленных способов, остальные его точки можно снять способом обмера: измерять расстояния между частями контура (если он прямоугольной формы) от одной исходной точки до другой. 20.Тахеометрическая сьемка(полевые,камеральные работы).Сущность геометрического нивелирования. Цель ее – получение топографического плана местности (ситуация + рельеф). Отличительные особенности съемки: 1)Съемка контуров и рельефа с пунктов съемочного обоснования выполняется полярным способом. При этом горизонтальные углы измеряют при одном (основном) положении вертикального круга, а расстояния по нитяному дальномеру. 2)Превышения и высоты съемочных точек определяют методом тригонометрического нивелирования, то есть измеряют угол наклона и расстояние до точки. Рекогносцировка: закрепление точек съемочного обоснования. 2.Прокладка теодолитно-нивелирного хода: те же работы, что и выше. 3.Съемка ситуации и рельефа: а) Приведение теодолита (тахеометра) в рабочее положение: центрирование и горизонтирование. б) Определение МО, измерение высоты инструмента i. в) Ориентирование 0° лимба горизонтального круга вдоль одной из сторон хода, откладывание i на рейке. г) Собственно съемка: измерение горизонтальных углов β, углов наклона ν, расстояний читанных по рейке (от теодолита до точки) D с занесением на абрис съемки. При тахеометрической съемке применяют координатные теодолиты-тахеометры: номограммные и электронные (рис. 75). Эти инструменты предназначены для непосредственного измерения в полевых условиях, превышений, горизонтальных проложений и приращений прямоугольных координат. Электронные тахеометры разделяются на полярные: β, d, h (Н - высота) определяются и высвечиваются на табло; ортогональные: измеряются и вычисляются ∆х, ∆у, h, Χ, Υ, Η. Формулы, на основе которых составлена программа мини – ЭВМ следующие: d = D·cosν; h = d·sinν; ∆х = d·cosν; ∆у = d·sinν, где d – горизонтальное проложение, ν – угол наклона линии местности. Камеральные работы 1.Контроль полевых документов. 2.Вычисление Х, У, Н точек съемочного обоснования. 3.Обработка журнала тахеометрической съемки: вычисление ν, d, h, Η по тахеометрическим таблицам или по формулам. V + h = hиз табл. + i; h = hиз табл.+ i – V; hиз табл = d·tgν; h = d·tgν + i – V, где i – высота инструмента, V – высота наведения, h – превышение, hиз табл – табличное превышение. Н = Нст.+h, Нст. – отметка станции, точки стояния теодолита, Н – отметка реечной точки. 5. Нанесение съемочных точек с помощью транспортира и линейки или тахеографа (совмещает в себе оба инструмента) способом полярных координат. 6. Вычерчивание ситуации и рельефа. 7. Оформление плана в соответствии с условными знаками. 21.Измерение длин линий: непо-средственный, косвенный и даль-номерный способы. Линейные измерения на местности производят непосредственным или косвенным методами. Для непосредственного измерения расстояний используют землемерные ленты, измерительные рулетки или инварные проволоки, которые последовательно укладывают в створе измеряемой линии. При вычислении длины линии учитывают поправки, связанные с компарированием мерного прибора, его температурой и углом наклона линии к горизонту. С помощью стальных лент и рулеток длины линий измеряют с относительной погрешностью 1:1000 - 1:5000 в зависимости от методики и условий измерений.
Длиномер – мерный диск со счетным механизмом и направляющими роликами. При косвенном методе измерений используют оптические или электронные дальномеры, позволяющие получать расстояния по измеренным углам, базисам, времени и другим параметрам. Принцип работы оптических дальномеров основан на решении прямоугольного треугольника, в котором по малому (параллактическому) углу β и противолежащему катету b (базису) вычисляют длину другого катета D = b . ctgβ. Для удобства измерений одну из величин (b или β) принимают постоянной, а другую измеряют. Поэтому оптические дальномеры бывают с постоянным углом и переменным базисом (например, нитяный дальномер) и постоянным базисом и переменным углом. Точность измерения расстояний оптическими дальномерами характеризуется относительной погрешностью от 1:200 до 1:2000. 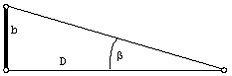 Рис.36 Параллактический треугольник Электронные дальномеры, к которым относят светодальномеры, лазеные рулетки, электронные дальномерные насадки, измеряют расстояния с использованием электромагнитных волн. Погрешность измерения составляет от 3 мм до (10 мм + 5 мм/км). 22.Теория нитяного дальномера Теорию нитяного дальномера можно рассмотреть на примере нитяного дальномера теодолита, который состоит из средней горизонтальной нити и двух дальномерных нитей – верхней и нижней. В качестве постоянного базиса используют нивелирную рейку. если визирный луч перпендикулярен базе (рейке), то расстояние между теодолитом и рейкой равно произведению С – коэффициента дальномера на количество сантиметровых делений между дальномерными нитями. Постоянной дальномера – с можно пренебречь из – за ее малой величины. У современных приборов С = 100, это значит, что одному сантиметровому делению рейки на местности соответствует 1метр. Рассмотрим случай, когда визирный луч не перпендикулярен базису. Тогда dАВ = L·cosν; L = К·n'; n' = n·cosν; отсюда L = К·n·cosν; окончательно получаем, что горизонтальное проложение d=K·n·cosν·cosν=K·n·cos2ν = L· cos2ν, где К – коэффициент дальномера, n – количество сантиметровых делений между верхней и нижней дальномерными нитями, ν – угол наклона линии АВ. Точность измерения расстояний нитяным дальномером относительно невелика и составляет порядка 1:300 измеряемого расстояния. Однако для многих практических задач инженерной геодезии (прежде всего для выполнения теодолитных и топографических съемок) этой точности оказывается достаточно. 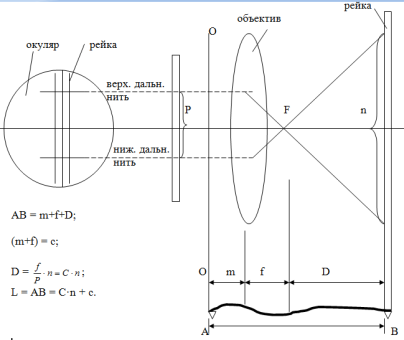 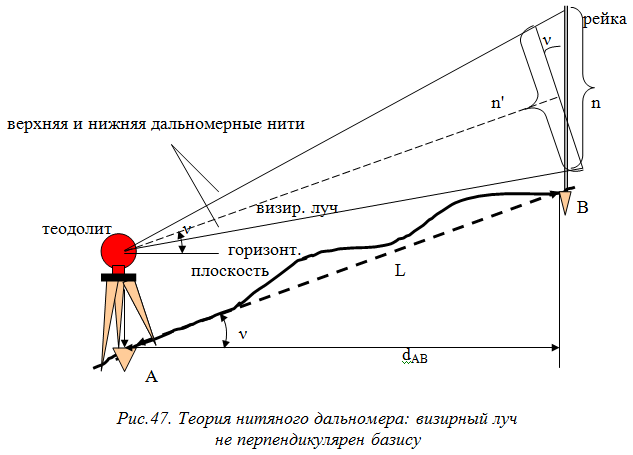 23. Нивелирование и его виды Нивелирование – это такой вид геодезических работ, при котором определяют абсолютные или условные высоты точек, или превышения между точками. Если высоты точек определяют относительно уровня Балтийского моря (нуля Кронштадского футштока – рейки с делениями на водомерном посту), высоты называют абсолютными, а систему высот Балтийской. В случае, когда за уровенную принимают какую – либо произвольную поверхность, высоты называют условными. 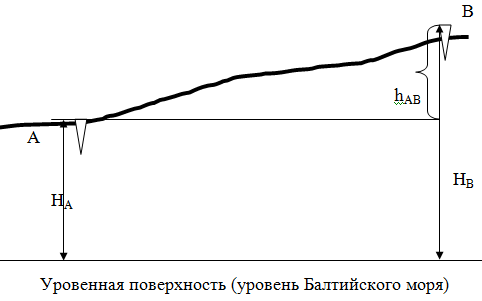 НА, НВ – абсолютные отметки точек А и В. Абсолютной отметкой точки называется численное значение ее высоты. h – превышение точки В над точкой А. h = НВ – НА. Превышение может быть со знаком «+» (В выше А) и «-» (В ниже А). Существует несколько видов нивелирования: 1.Геометрическое (при помощи горизонтального луча визирования). 2.Тригонометрическое (при помощи наклонного луча визирования). 3.Физическое: барометрическое, гидростатическое. 4,Механическое. 5.Азрорадиогеодезическое. 6.Стереофотограмметрическое. Барометрическое нивелирование выполняется путем измерения барометрами – анероидами давления в точках на физической поверхности Земли, между которыми измеряют превышение. Гидростатическое нивелирование основано на свойстве жидкости в сообщающихся сосудах (в сообщающихся сосудах уровень жидкости одинаков). 24.Геометрическое нивелирование и способы его выполнения. Для выполнения геометрического нивелирования необходимо наличие горизонтального луча визирования и отсчетной шкалы. Горизонтальный луч визирования формирует в пространстве специальный геодезический прибор – нивелир Различают два способа геометрического нивелирования в зависимости от места установки нивелира: «из середины» и «вперед».Расстояние от нивелира до рейки называется длиной визирного луча или «плечом». 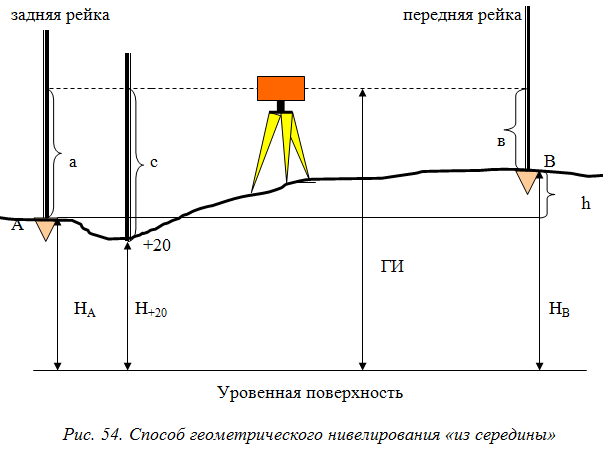 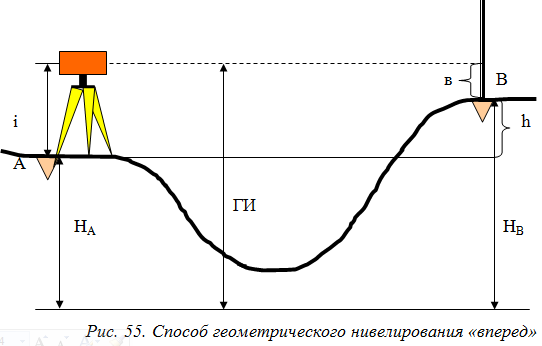 Точка А – исходная, с нее начинают измерения на станции нивелирования, ее называют задней, точка В – определяемая, ее называют передней. Одна установка нивелира называется станцией. Н – отметка точки, h – превышение. h = задний отсчет – передний отсчет. По отметке точки А – НА и превышению можно вычислить отметку НВ точки В двумя способами: 1.При помощи превышения НВ = НА + h. 2.Через горизонт инструмента. Выразим h через (а – в) НВ = НА + а – в. Обозначим ГИ = НА + а, тогда НВ = ГИ – в. Горизонт инструмента (ГИ) – высота визирного луча над исходной уровенной поверхностью. На данной станции он равен отметке точки плюс отсчет по рейке, установленной в этой точке. 25.Устройствой и классификация нивелиров. Назначение основных частей. Нивелиры классифицируют по двум признакам: по точности и по способу установки визирного луча в горизонтальное положение. По первому признаку нивелиры делятся на: 1.Высокоточные – средняя квадратическая погрешность на 1 км двойного хода – 0,5 мм. К ним относятся такие марки, как Н-1, Н-2, НС-2, Н-05, 3Н-2 – КЛ. При работе с этими нивелирами допускается длина плеч (расстояние от нивелира до рейки) до 50 метров. 2.Точные – средняя квадратическая ошибка на 1 км двойного нивелирования 3 мм. Примером нивелиров являются марки Н-3, 2Н-3Л, НС-3, НС-4, 3Н – 2КЛ. Допускается длина плеч до 75 – 100 метров. 3.Технические – ошибка 10 мм на 1км двойного хода. К ним относятся такие нивелиры, как НТ, НТС, Н10 и другие. Длина плеч допускается до 100 – 150 метров. По второму признаку нивелиры различают: 1. Уровенные (с цилиндрическим уровнем) 2. Нивелиры с самоустанавливающейся линией визирования (с компенсатором). Основные составные части нивелира: 1 – окуляр, для увеличения изображения цели; 2 – диоптрийное кольцо, для получения четкого изображения сетки нитей; 3 – круглый уровень, для приведения прибора в рабочее положение (приведения основной оси вращения в отвесное положение); 4 – кремальера, для получения четкого изображения цели; 5 – зрительная труба; 6, 9 – подставка, служит основанием прибора, несет вертикальную ось вращения зрительной трубы; 7 – наводящий винт трубы, для точного наведения на цель; 8 - пружина трегера с втулкой служит для закрепления нивелира на штативе становым винтом; 10 – элевационный винт для приведения в нульпункт пузырька цилиндрического уровня; 11 – нониус, для отсчета углов по горизонтальному лимбу при угломерных работах; 12 – объектив, для формирования изображения визирной цели; 13 – механический визир, для приближенного наведения на цель; 14 – цилиндрический уровень, для приведения визирной оси зрительной трубы в строго горизонтальное положение; 15 – исправительный винт уровня при трубе, для исправления положения пузырька цилиндрического уровня; 16 – три подъемных винта для приведения прибора в рабочее положение; исправительные винты круглого уровня, для исправления положения пузырька уровня (на рис. не видны), 17 – лимб, для измерения горизонтальных углов. 26.Поверка и юстировка нивелира элевационным винтом.  ОО – основная ось вращения прибора; uu – ось цилиндрического уровня; VV – визирная ось зрительной трубы; u'u' – ось круглого уровня, mm – средняя горизонтальная нить сетки. Поверки выполняют после приведения прибора в рабочее положение и поверяют выполнение следующих условий: 1.Ось круглого уровня должна быть параллельна основной оси вращения нивелира. Уровень располагают между двумя подъемными винтами, вращая их одновременно в разные стороны, приводят пузырек круглого уровня на середину. Затем поворачивают трубу на 180º и наблюдают за перемещением пузырька. Если пузырек круглого уровня остался в нульпункте, условие поверки выполнено, в противном случае производят юстировку. При помощи исправительных винтов круглого уровня перемещают пузырек по направлению к нульпункту на половину схода. Окончательно возвращают пузырек на середину подъемными винтами. После исправления поверку повторяют. 2.Средняя горизонтальная нить сетки нитей должна быть перпендикулярна оси вращения инструмента. Наводят трубу на рейку, расположенную не менее чем в 30 метрах от нивелира. Работают наводящим винтом трубы, перемещая изображение рейки сначала в правое положение поля зрения трубы, затем в левое, каждый раз при этом берут отсчет по рейке. В случае совпадения отсчетов аКП и аКЛ условие поверки выполнено, в противном случае нужно развернуть сетку нитей на величину  . .3.Ось цилиндрического уровня должна быть параллельна визирной оси зрительной трубы. Эта поверка считается основной поверкой нивелира. Один из способов ее выполнения – нивелирование «вперед» двух точек .  h = i1 – в0 = i1 – (в – х) х =  ≤ 4мм ≤ 4ммh = а0 – i2 = (а – х) – i2 hср. =  - безошибочно. То же получается при нивелировании «из середины» при равных плечах. - безошибочно. То же получается при нивелировании «из середины» при равных плечах.Если х > 4мм, необходимо произвести юстировку: 1.Вычисляют верный отсчет по рейке а0=а – х 2.Элевационным винтом наклоняют зрительную трубу и устанавливают на рейке отсчет а0. При этом пузырек цилиндрического уровня сместится из середины. 3.Исправительными винтами цилиндри-ческого уровня пузырек уровня возвращают на середину. Повторяют поверку. 28.Нивелирование площади по квадратам:полевые, камеральные Одним из видов наземных топографических съемок является нивелирование поверхности. Нивелирование поверхности по квадратам – один из наиболее распространенных способов этого вида съемки. Каждая вершина закрепляется колышком, забиваемым вровень с землей. Рядом забивают сторожок с номером вершины 1а, 2в и т. Д. Кроме вершин квадратов на местности закрепляются плюсовые точки, расположенные в характерных точках рельефа и на перегибах скатов, находящихся внутри квадратов и на их сторонах. Положение точек определяется от ближайших сторон или вершин квадратов. Схему разбивки сетки квадратов и плюсовых точек вычерчивают на бумаге На схеме стрелками показывают характерные линии рельефа и направления, по которым можно проводить интерполирование горизонталей. Она служит абрисом горизонтальной съемки местности, которая производится одновременно с разбивкой квадратов. Основным способом съемки является способ перпендикуляров; применяют также способ линейных засечек (при малых размерах квадратов). При нивелировании квадратов могут встретиться три случая. 1,Стороны квадратов более 100 метров. 2,Стороны квадратов менее 100 метров, рельеф средней сложности. 3,Стороны квадратов менее 100 метров, рельеф спокойный. 1 случай: нивелир устанавливают приблизительно в центре квадрата и берут отсчеты в четырех вершинах и плюсовых точках. 2 случай: при нивелировании с одной станции группы квадратов сначала выбирают связующие точки между станциями так, чтобы они образовали замкнутый ход. Отсчеты вначале берут на связующие точки по двум сторонам рейки. Вершины квадратов и плюсовые точки нивелируют как промежуточные по черной (основной) стороне рейки. 3 случай: при нивелировании всех квадратов с одной станции нивелир устанавливают приблизительно в середине участка и берут отсчеты на все вершины и плюсовые точки по одной стороне рейки. Вершина, с которой начинают нивелирование, должна быть хорошо закреплена и сохранена до окончания работ.После производства нивелирования и привязки сети квадратов к опорной геодезической разбивки квадратов и съемки ситуации и журнал нивелирования. В камеральных условиях после контроля полевых документов обрабатывают журнал нивелирования. Составляют план местности, вычерчивают ситуацию и рельеф. Оформляют план в соответствии с условными знаками. 27.Продольное нивелирование трассы: Полевые работы Трассирование – комплекс работ для получения оптимального варианта трассы по отношению к ландшафту местности, рельефу, в экономическом отношении. Полевые работы. 1.Рекогносцировка – осмотр местности и закрепление главных точек трассы начала трассы (НТ), конца трассы (КТ), створных точек (СТ), вершин углов поворота трассы (ВУ)деревянными или бетонными столбами высотой около одного метра. На столбах подписывают названия и номера точек. 2.Измерение углов поворота трассы – угла между предыдущим и последующим направлением трассы. Теодолитом измеряют правые по ходу горизонтальные углы и вычисляют углы поворота трассы. Если трасса поворачивает вправо, то φ1 = 180º- β1, угол поворота трассы влево вычисляют φ2 = β2 – 180º. 3.Разбивка трассы: расчистка и закрепление главных точек кривых, пикетов, плюсовых точек, поперечников. После вычисления углов поворота трассы выбирают из «Таблиц для разбивки круговых кривых» или вычисляют по формулам элементы кривых: тангенс (касательная к кривой, Т), биссектрису (Б), длину кривой (К), домер (Д).   R – радиус кривой; Т = R·tg(φ/2); β =  ; ; По пикетажным значениям находят на местности главные точки кривых и закрепляют их деревянными колышками. На трассе закрепляют плюсовые точки – точки пересечения с характерными элементами ситуации и рельефа, определяют их пикетаж от предыдущего пикета. Нивелирование трассы. Выполняют методом геометрического нивелирования способом «из середины». Нивелирование технической точности, при котором применяются технические нивелиры,. Километровые пикеты, реперы нивелируют как связующие точки, а плюсовые точки и точки поперечников – как промежуточные, только по черной стороне рейки. По окончании полевых работ получают следующие документы: пикетажный журнал и журналы нивелирования трассы. Камеральные работы Ежедневный контроль разбивки пикетов и вычисления углов поворота трассы. Математическая обработка результатов измерений заключается в вычислении допустимых и полученных невязок в теодолитных и нивелирных ходах и уравнивании этих ходов. Допустимая невязка в теодолитных ходах fβ = 3'√n, где n – количество сторон в ходе, для хода нивелирования fh = ±50 мм √L, где L – длина хода в километрах или fh = ± 10мм√n, где n – число станций в ходе. Графические работы заключаются в составлении плана трассы в масштабах 1:5000 и высотой сечения рельефа 2м в горной местности и 1:10000 и высотой сечения рельефа 5метров в равнинной. Кроме плана, вычерчивают продольный профиль трассы и профили поперечников. Профили поперечников строят в одинаковом масштабе по горизонтали и вертикали. 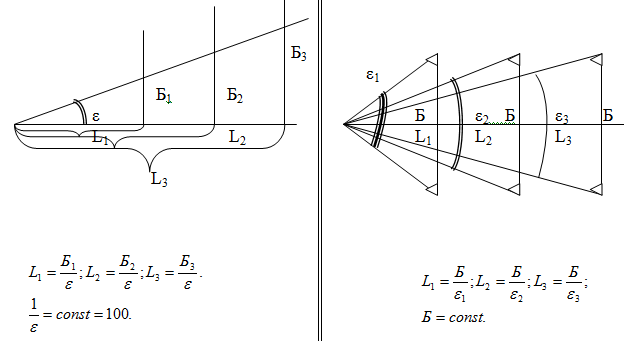 С постоянным углом С постоянной базой 29.Содержание и порядок производства аэрофотосъемки Этот вид съемки выполняется путем фотографирования местности с самолета (вертолета и т.д.) специальным фотоаппаратом . Прикладная рамка его ограничивает формат аэроснимка, а имеющиеся на ней координатные метки определяют начало и направление координатной системы аэроснимка. Пересечение оптической оси фотокамеры с плоскостью называется главной точкой снимка, которая характеризуется отсутствием искажений в ней и обычно совпадает с началом координат х0=0; у0=0. В случае ровной местности масштаб аэроснимка выражается 1:N=l:z=fк:H =  , где Н – высота фотографирования, ав – расстояние между двумя какими – либо точками на снимке, АВ – расстояние между этими же точками на местности, М – знаменатель масштаба карты (если масштаб снимка определяют по топографической карте). Фотографирование осуществляется при вертикальном положении оптической оси аэрофотоаппарата (±3º). , где Н – высота фотографирования, ав – расстояние между двумя какими – либо точками на снимке, АВ – расстояние между этими же точками на местности, М – знаменатель масштаба карты (если масштаб снимка определяют по топографической карте). Фотографирование осуществляется при вертикальном положении оптической оси аэрофотоаппарата (±3º).После фотографирования для измерения аэроснимков и дальнейшего их преобразования в план или карту используют два способа: комбинированный (фотограмметрический) и стереофотограмметрический. При первом способе контуры на плане получают по аэроснимкам, а рельеф снимают в поле способом мензульной съемки. Стереофотограмметрический метод основан на измерении пары снимков, взаимно перекрывающихся и полученных с конечных точек некоторого базиса. Базисом воздушного фотографирования называется расстояние, пролетаемое самолетом между двумя экспозициями аэрофотоаппарата (расстояние, пролетаемое между двумя фотографированиями). Его можно вычислить по следующей формуле: В=N·в, где N – знаменатель масштаба снимка, в – расстояние в мм между главными точками двух снимков. Самолет выполняет параллельные залеты. При этом пара соседних снимков имеет продольное и поперечное перекрытие. Продольное перекрытие снимков – общая часть фотографируемой местности на предыдущем и последующем снимках .Вычисляют продольное перекрытие по следующей формуле: Р=  %.., где ℓп – общая перекрывающаяся часть снимков, ℓ - длина стороны снимка. Величина его не должна быть менее 60% - в этом случае снимки образуют стереопару, по которой в дальнейшем получают план или карту местности. %.., где ℓп – общая перекрывающаяся часть снимков, ℓ - длина стороны снимка. Величина его не должна быть менее 60% - в этом случае снимки образуют стереопару, по которой в дальнейшем получают план или карту местности.Совместное измерение пары снимков позволяет получать пространственное расположение точек рельефа или объекта. Стереофотограмметрический метод съемки включает три этапа. 1.Летно-съемочные и фотолабораторные работы. 2.Полевые геодезические работы. 3.Камеральные работы Трансформирование – это преобразование полученных аэроснимков к заданному масштабу, постоянному по всей поверхности снимка. Оно производится по полученным после привязки снимков опорным точкам сгущения плановой основы и выполняется на фототранс-форматорах. Для трансформирования негатив помещают в кассету ФТ, на экране укрепляют чертеж с изображением в заданном масштабе опорных точек плановой геодезической основы, экран смещают и поворачивают так, одноименные опорные точки на чертеже и спроектированные с негатива совпали, заменяют чертеж фотобумагой, экспонируют ее, проявляют, фиксируют и получают плановый снимок в ортогональной проекции. Из таких снимков можно монтировать фотоплан Стереофотограмметрическую обработку аэроснимков можно выполнить двумя способами – универсальным и дифференциальным. При универсальном методе по двум аэроснимкам, составляющим стереопару, на специальных стереофотограмметрических приборах создается пространственная геометрическая модель местности. С помощью неё можно осуществить визирование на любую точку ее поверхности и отсчитать или зафиксировать все пространственные координаты точки х, у, z. При дифференциальном методе процесс создания плана делится на два основных этапа. Первый этап – определение превышений точек аэроснимков или изображение на них рельефа горизонталями. Второй этап – получение контурной части карты в виде фотоплана или графического плана. 31.Геодезическая сеть.Методы построения гс. |