|
Аэронавигация Будяк 1 семестр (шпора). 1 Географическая система координат. Одна ось это меридиан, вторая экватор, координаты (широта и долгота ). Экватор (equator
1 Географическая система координат.
Одна ось это меридиан, вторая экватор, координаты (широта и долгота ).
Экватор (equator)- большой круг, плоскость которого перпендикулярна оси вращения Земли.
Меридиан(meridian) – большой круг, плоскость которого проходит через ось вращения Земли.
Параллель(parallel) – малый круг, плоскость которого перпендикулярна оси вращения (параллельна экватору).
Широтой (сферической широтой) называется угол, заключенный между плоскостью экватора и направлением из центра сферы в данную точку.
Долготой (сферической долготой) называется двугранный угол, заключенный между плоскостями начального меридиана и меридиана данной точки.
1,2 ортодромическая.
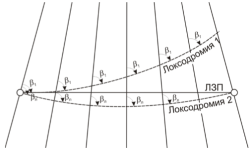
Ортодромией называют дугу большого круга, проходящую через две заданные точки.
Ортодромия является линией кратчайшего расстояния между двумя точками на поверхности сферы
Локсодромией называется кривая, пересекающая меридианы под постоянным углом. Путевой угол у локсодромии одинаковый.
Осями являются две ортодромии, перпендикулярные друг другу в начале системы координат. В зависимости от того, как направлены эти оси и где расположено начало системы координат, различают две их группы.
а) Главноортодромические. Начало размещается в ИПМ, а одну из осей, называемую главной ортодромией, направляют вдоль маршрута. Вторая ось направляется вправо от направления полета. Координаты выражены как в линейной мере (в километрах), так и в угловой мере.
На практике не используется т.к не т информации о фактическом местонахождении ВС относительно ЛЗП.
б) Частноортодромическая . Одна из осей (S) направляется по ЛЗП а вторая перпендикулярно к ней вправо .
координатами являются - S пройденное или S оставшееся и линейно боковое уклонение (ЛБУ).
3. Полярная система координат.
оси : северное направление меридиана и направление на ртс.
Координатами в полярной системе являются пеленг и дальность .
Дальность D – расстояние от начала системы координат до объекта (точки).
Пеленг (П) – угол в горизонтальной плоскости между направлением, принятым за начало отсчета и направлением на объект.
|
2меридианы
За северное направление магнитного меридиана в данной точке принимается направление горизонтальной составляющей вектора напряженности магнитного поля Земли в данной точке.
Дугу большого круга проходящую через полюсы называют истинным меридианом, а измеренные от него направления истинными.
Опорный меридиан - это абсолютно любой меридиан ( направление ) но на практике стараются чтобы оно совпадало с северным направлением истинного или магнитного меридиана какой-либо точки на маршруте – аэродрома вылета.
Магнитное склонение ΔМ – угол, заключенный между северным направлением истинного и магнитного меридианов в данной точке
Азимутальная поправка ( ΔА) – это угол заключенный между северными направлениями опорного и истинного меридианов.

Условное магнитное склонение (ΔМу) – это угол между северными направлениями опорного и магнитного меридианов. Оно может быть использовано для прямого перехода от магнитного курса к ортодромическому и обратно, минуя истинный.
ΔМу = ΔМ + ΔА.
Углом схождения меридианов называется разность путевых углов ортодромии, проходящей через эти точки.
 δсх=ПУ2 – ПУ1 δсх=ПУ2 – ПУ1
В северном полушарии, когда вторая точка восточнее первой, он положителен. Если же, наоборот, ортодромия идет на запад, то отрицателен. В южном полушарии картина обратная, поскольку широта имеет отрицательный знак.
|
3.Заданная траектория полета является пространственной линией. Она задается отдельно в горизонтальной плоскости в виде маршрута полета и в вертикальной плоскости в виде профиля полета.
Маршрут полета – это ЛЗП, заданная с помощью опорных точек, над которыми должно пролететь ВС.

Заданный профиль полета – проекция заданной траектории на вертикальную плоскость, проходящую через развернутый в прямую линию маршрут полета

Профиль полета задается указанием, на какой высоте необходимо пролететь тот или иной пункт маршрута. Изображается профиль полета, как правило, на схемах захода на посадку в документах аэронавигационной информации.
|
5. навигационные элементы
Навигационные элементы – скалярные величины, характеризующие положение и перемещение ВС в пространстве
Навигационные элементы положения – это величины, которые показывают, в какой точке пространства находится ВС. (Навигационные элементы положения это координаты ВС – в любой системе координат).
ЛБУ – это расстояние от МС до ЛЗП, измеренное, по перпендикуляру к ЛЗП. Измеряется ЛБУ в километрах и считается положительным при уклонении вправо и отрицательным при уклонении влево, то есть знак ЛБУ соответствует знаку координаты Z.
Пройденным расстоянием Sпр называется расстояние между ППМ, от которого летит ВС, и проекцией МС на ЛЗП. Sпр измеряется вдоль ЛЗП и не является длиной пути ВС от ППМ до текущего МС.
|
6.Навигационные элементы движения
Навигационные элементы движения характеризуют, как перемещается ВС в пространстве. Это величины, описывающие скорость и ускорение ПМС.
Скорость перемещения ВС относительно воздушной массы называется истинной воздушной скоростью ( Vи ) .
Вектор полной скорости принято раскладывать на вертикальную и горизонтальную составляющие. Вертикальная составляющая называется вертикальной скоростью и обозначается V в или V у.
Курс– угол в горизонтальной плоскости, заключенный между направлением, принятым за начало отсчета и проекцией на эту плоскость продольной оси ВС.
ФПУ называется направление вектора путевой скорости относительно меридиана.
|
4.Ортодромией называют дугу большого круга, проходящую через две заданные точки.
Ортодромия является линией кратчайшего расстояния между двумя точками на поверхности сферы. Ортодромия пересекает меридианы под разными углами. Исключениями являются экватор и сами меридианы.

Локсодромией называется кривая, пересекающая меридианы под постоянным углом. Путевой угол у локсодромии одинаковый.

В ортодромических системах осями являются две ортодромии, перпендикулярные друг другу в начале системы координат. В зависимости от того, как направлены эти оси и где расположено начало системы координат, различают две их группы
|
7. горизонтальное маневрирование

При отсутствии ветра и при постоянном крене курс во время разворота меняется равномерно (угловая скорость разворота постоянна) и ВС выполняет полет по дуге окружности с радиусом, называемым радиусом разворота.
 χ – угол крена. χ – угол крена.
Время разворота зависит от разности начального и конечного курсов.
|
8. Ветер и его характеристики
Ветер(wind) – это горизонтальное перемещение воздушных масс. В каждой точке пространства в данный момент времени имеется определенное направление и скорость ветра, которые образуют вектор ветра, обозначаемый U .
Навигационное направление ветра (δн или НВ) – угол, заключенный между северным направлением меридиана и направлением перемещения воздушной массы (куда дует ветер).
Метеорологическое направление ветра δ - угол, заключенный между северным направлением истинного меридиана и направлением, откуда перемещается воздушная масса (откуда дует ветер).

δ = δн ± 180˚ + ΔМ 
δн = δ ± 180˚ - ΔМ
Скорость ветра - это скорость движения воздушных масс относительно земли
|
9. Навигационный треугольник скоростей.
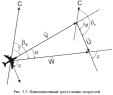
- магнитный курс γ – угол между северным направлением меридиана и вектором
- фактический путевой угол βФ - угол между северным направлением меридиана и вектором W;
- навигационное направление ветра δн– угол между северным направлением меридиана и направлением вектора U .
Угол ветра (УВ, ε) – угол, заключенный между вектором путевой скорости W и вектором ветра U
Курсовой угол ветра (КУВ, ψ ) – угол заключенный между вектором истинной скорости V и вектором ветра U.
Угол сноса (УС,α) – угол, заключенный между векторами истинной V и путевой W скоростей.

|
11 основные сведения о магнитном поле земли.
.Как и у большинства других планет у Земли имеется магнитное поле. Предполагается, что оно вызвано конвективным перемещением в ядре планеты расплавленных металлических масс. Если эти массы имеют электрический заряд, то их движение представляет собой электрический ток, который, в соответствии с законами физики, и вызывает магнитное поле. Магнитные силовые линии выходят и входят в поверхность Земли в точках, называемых геомагнитными полюсами . В любой точке пространства магнитное поле можно характеризовать вектором его напряженности Т. Магнитное наклонение- угол на который магнитная стрелка отклоняются относительно плоскости горизонта .
|
12.понятие о девиации магнитного компаса.
Девиация – означает отклонение.
Девиация ΔК – угол, заключенный между северными направлениями магнитного и компасного меридианов.

ΔК =МК-КК.

Вариация (Δ) – угол между северными направлениями истинного и компасного меридианов.
Δ = ΔК + ΔМ .
|
13.компас КИ-13.
КИ-13 состоит из герметичного корпуса, с лицевой стороны которого имеется прозрачное «окошко». За окошком располагается курсовая нить, служащая для отсчета курса. Чувствительным элементом компаса служит расположенная внутри корпуса так называемая картушка в форме цилиндра или усеченного конуса, по окружности которой нанесена шкала курсов. Цена делений 5°, а оцифровка сделана через 30° . Следует отметить, что практически на всех типах шкал курсовых приборов оцифровка приведена в десятках градусов, то есть, например, надпись 27 означает 270 . На картушке закреплен поплавок и два намагниченных стержня. Закрепленной в центре картушки шпилькой она опирается на подпятник, установленный на дне корпуса.
Герметичный корпус прибора заполнен лигроином, который сглаживает колебания картушки и, уменьшает ее вес, а, следовательно, трение между шпилькой и подпятником.
В основании корпуса установлен девиационный прибор, который представляет собой просто два постоянных магнита, которые позволяют уменьшить девиацию компаса.
достоинствами являются: - высокая надежность; - отсутствие необходимости в электрическом питании для его работы
недостатки:
- низкая точность;
- большие погрешности при разворотах самолета
- невозможность сразу отсчитать курс после завершения разворота из- за колебательных движений картушки
- неустойчивая работа в полярных районах, где мала горизонтальная составляющая магнитного поля Земли
|
14.нормальная статическая девиация
Девиация, которая имеет место на горизонтально расположенном неподвижном самолете, называется нормальной статической девиацией.
Различные источники на борту, вызывающие магнитное поле самолета, условно называют «железом». «Железо» делится на «твердое» и «мягкое». Твердость и мягкость имеется в виду с точки зрения магнитных свойств.
К «твердому железу» относят сталь легированную кобальтом или вольфрамом которую трудно намагнитить и трудно размагнитить. Примером «твердого железа» является обычный магнит.
при развороте ВС на 360° величина девиации ΔК будет изменяться по синусоиде. При этом ΔК дважды примет нулевое значение, как бы через каждый полукруг. Поэтому девиацию, вызываемую «твердым железом», называют полукруговой девиацией.
Примером «мягкого железа» является обычное железо.
При развороте самолета на 360° девиация будет меняться по синусоиде. Она четыре раза будет проходить через ноль, поэтому ее называют четвертной девиацией
|
15.креновая девиация
Креновая девиация. Вызывается вертикальной составляющей магнитного поля самолета.
Если самолет, даже неподвижный, имеет поперечный крен или крен продольный (тангаж), то появляются силы, вызывающие дополнительную девиацию. Такая девиация и называется креновой.
Если ВС имеет крен а чувствительный элемент остается горизонтальным то появляется проекция магнитного поля самолета на эту плоскость.
При длительном тангаже девиация достигает значения величины тонгажа
На курсах 0° и 180° креновая девиация равна нулю при любом крене.

ускорительная девиация вызывается вертикальной составляющей магнитного поля Земли .
при разгоне и торможении ВС на чувств. элемент компаса действуют силы и устанавливают его в мнимую горизонтальную плоскость не совпадающую с фактической.

Ускорительная девиация при изменении курса также меняется по синусоиде и равна нулю на курсах 0° и 180° при любом ускорении. Максимальные значения (на курсах 90° и 270°) зависят от величины ускорения ВС и магнитного наклонения тета. Чем больше наклонение (а оно больше в полярных районах), тем больше ускорительная девиация.
При кренах, превышающих критический, девиация уже не носит характер синусоиды, а монотонно неограниченно возрастает при развороте самолета, составляя уже десятки градусов.
Если ВС движется с креном по окружности ускорительная девиация будет равна нулю 900 и 2700 а максимальное 00 и 1800.
|
16. Гирополукомпас ГПК-52
Основной частью прибора является гироузел массой около 2 кг, представляющий собой ротор гироскопа вместе с электродвигателем, приводящим его во вращение со скоростью 22-23 тыс. оборотов в минуту.
Гироскоп помещен в карданов подвес из двух рамок. Во внутренней рамке на подшипниках закреплена ось гироскопа в горизонтальном положении. Ось внутренней рамки закреплена в подшипниках во внешней рамке, которая может вращаться вокруг вертикальной оси. Эта внешняя ось жестко закреплена в корпусе ГПК-52, который размещен в кабине самолета и, естественно, поворачивается вместе с самолетом.
На оси внешней рамы карданова подвеса закреплена шкала отсчета курсов, плоскость шкалы совпадает с плоскостью самолета.
Рядом со шкалой на корпусе прибора нанесен треугольный индекс, напротив которого по шкале и отсчитывается курс.
При развороте ВС корпус прибора поворачивается вместе с ним, а гироскоп внутри карданова подвеса сохраняет направление своей оси.
Угол между осью курсового гироскопа и продольной осью самолета называют гироскопическим курсом.
|
17 горизонтальная коррекция азимутальная коррекция.
горизонтальная коррекция
Чтобы ось гироскопа оставалась горизонтальной в приборах предусмотрена горизонтальная коррекция ее механизм постоянно удерживает ось курсового гироскопа в горизонтальном положении. Для этого используется механизм горизонтальной коррекции который представляет собой жидкостной переключатель ( маятник).
Это небольшая емкость с токопроводящей жидкостью, закрепленная на нижней части гироузла. В жидкости имеется пузырек воздуха, а по краям емкости – электрические контакты. При отклонении от горизонта контакты замыкаются и электродвигатель поворачивает гиро узел в горизонтальное положение .
Азимутальная коррекция.
скорость азимутального ухода гироскопа за счет суточного вращения Земли зависит от широты места самолета.
В южном полушарии Земли широта отрицательна, поэтому противоположен и знак (сторона) ухода
ГПК снабжен механизмом азимутальной коррекции. Он представляет собой небольшой электромотор, скорость вращения которого можно регулировать. На пульте управления ГПК имеется кремальера установки широты пролетаемой местности, которая и регулирует скорость электромотора. Механизм азимутальной коррекции на практике часто называют «широтным потенциометром»
21. Собственный уход гироскопа.
1) Дисбаланс ротора гироскопа.
2) Трение в осях карданова подвеса.
3) Неточность механизма азимутальной коррекции.
22. Определение заданных путевых углов
Зипу – это угол между истинным меридианом и ЛЗП.
при использовании локсодромических курсовых приборов заданный истинный путевой угол следует измерять относительно среднего меридиана участка маршрута.
Определение ЗПУ для полета с использованием ортодромических курсовых приборов.
На практике путевые углы для каждого участка по ортодромии измеряются с помощью транспортира на полетной карте.
|
18. Опорный меридиан и ортодромический курс.
серверным направлением опорного меридиана называется произвольное направление, выбранное пилотом в качестве начала отсчета курса, и которое сохраняет ось идеального гироскопа. Таким образом физически направление опорного меридиана - направление оси гироскопа, который выставлен по выбранному направлению. Принято выбирать начало отсчета,чтобы оно совпадало с северным направлением истинного или магнитного меридиана какой-либо точки на маршруте. Курс, измеренный от этого направления принято называть ортодромическим.
19.
ΔА0 =-ΔM0.
ΔА =(λ0-λ) sin φср - ΔM0
ΔMу = ΔА+ ΔM =(λ0-λ) sin φср + ΔM – ΔM0
|
19
Азимутальная поправка ( ΔА) – это угол заключенный между северными направлениями опорного и истинного меридианов.

Условное магнитное склонение (ΔМу) – это угол между северными направлениями опорного и магнитного меридианов.

Очевидно, что ΔА будет настолько отличаться от ΔА0, насколько изменился путевой угол ортодромии. Но разность путевых углов ортодромии в двух точках это по определению угол схождения меридианов δсх .
δсх=(λ2-λ1) sinφср.
ΔА = ΔА0+(λ0-λ) sin φср.
1) Опорный меридиан – истинный, то есть ось гироскопа выставлена по направлению истинного меридиана точки с долготой λ0 . Очевидно, что в этом случае ΔА0=0 и формула для азимутальной поправки примет вид
Δa =(λ0-λ) sin φср.
ΔMу = ΔА+ ΔM =(λ0-λ) sin φср + ΔM
2) Опорный меридиан – магнитный, то есть ось гироскопа выставлена по направлению магнитного меридиана точки с
|
20. Погрешности гироскопических курсовых приборов
1) Методическая погрешность из-за отклонения ЛФП от ортодромии.

зависит от площади уклонения от лфп.
2) Карданная погрешность.
Связана с особенностью некоторых курсовых приборов . Возникает у таких приборов у которых ось внешней рамки карданового подвеса жёстко связана с ВС.
эта погрешность обычно не превышает 2-3°
3) Виражная.
Этот вид погрешности также связан с конструкцией прибора и вызван наличием в современных гироскопических компасах механизма горизонтальной коррекции.
Если ВС находится в развороте, то на него действует центробежная сила, направленная по радиусу разворота в сторону от центра. Следовательно появляется мнимая вертикаль.
Для исключения виражной погрешности в каждом современном гироскопическом курсовом приборе, в том числе и в ГПК-52, имеется выключатель коррекции. Это устройство, которое работает автоматически и представляет собой небольшой гироскоп с двумя степенями свободы.
он срабатывает при угловой скорости 0,3°/с. Если данная величина длится от 3 до 15 сек. прерывается электрическая цепь питания электродвигателя механизма горизонтальной коррекции.
23. Общие сведения о курсовых системах
Курсовыми системами называют комплексные измерители курса ВС, объединяющие датчики, основанные на различных физических принципах.
1) Индукционный датчик (ИД). Является чувствительным элементом современного магнитного компаса, реагирующим на магнитное поле Земли.
Это электрическое устройство, на выходе которого снимается напряжение, зависящее от величины магнитного курса которое по проводам передается на указатели.
ИД имеет круглый корпус , внутри которого находятся три расположенных в горизонтальной плоскости и соединенных в форме треугольника стержня, изготовленных из пермалоя (сплава железа и никеля). Все три стержня имеют две общие обмотки. На одну из них (намагничивающую) подается переменное напряжение, а с другой (сигнальной) напряжение снимается. В зависимости от того, как ориентирован ИД относительно магнитного меридиана (силовых линий магнитного поля Земли), с сигнальной обмотки снимается разная величина напряжения (ЭДС) что соответствует величине магнитного курса.
На крышке ИД может быть размещен девиационный прибор. Так же как девиационный прибор в КИ-13, он предназначен для компенсации полукруговой девиации и представляет собой систему из двух постоянных магнитов.
2) Коррекционный механизм ( КМ). Предназначен для связи индукционного датчика с другими устройствами курсовой системы. В нем может быть компенсирована четвертная девиация.
На КМ имеется шкала, по которой можно отсчитать поступающий от ИД компасный курс. с помощью кремальеры можно ввести магнитное склонение и получить ИК.
Вокруг шкалы через каждые 15 градусов имеются винты лекального устройства, при вращении которых и устраняется четвертная девиация на соответствующем курсе.
3) Гироагрегат (ГА). Представляет собой заключенный в корпус курсовой гироскоп в кардановом подвесе и снабженный необходимыми для его работы устройствами (электродвигателями, механизмами коррекции, реле отключения коррекции и т.д.).
4) Указатели курса- это любые индикаторы, на которых можно отсчитать курс, измеренный курсовой системой.
5) Выключатель коррекции (ВК). Это уже упоминавшееся небольшое устройство с двухстепенным гироскопом, которое автоматически выключает коррекцию во время разворота.
6) Пульт управления- это устройство, с помощью которого пилот управляет курсовой системой.
- переключатель режимов работы;
- задатчик курса;
- рукоятка установки широты («широтный потенциометр»);
- переключатель «Север-Юг»;
- кнопка быстрого согласования.
Курсовая система может иметь два или три режима работы.
1) «ГПК» - режим гирополукомпаса. В этом режиме курсовая система работает аналогично ГПК-52.ИД и КМ в работе не участвуют .
2) «МК» - режим магнитной коррекции- работает вся цепочка КС.
3) «АК» - режим астрономической коррекции не используется так как нет оборудования .
| |
|
|
 Скачать 391.24 Kb.
Скачать 391.24 Kb.