Шпоры по военке 4 курс VII семестр. 1. Назначение и задачи иас
 Скачать 0.74 Mb. Скачать 0.74 Mb.
|

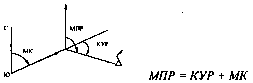
23. APK-19: Назначение, комплект и ТТД радиокомпасов.Радиопеленгаторы широко используются в авиационной навигации. С помощью наземных радиопеленгаторов определяется направление на самолетную радиостанцию (пеленг), а с помощью самолетных радиопеленгаторов (радиокомпасов) - направление на наземную радиостанцию (курсовой угол радиостанции - КУР).
магнитного меридиана и направлением на ПРС, проходящим через центр самолета. Зная МПР двух радиостанций, можно определить местонахождение самолета. Комплект АРК-19. В комплект АРК-19 входят: приемник; пульт управления; блок гониометра; пульт настройки. Радиокомпас выдает информацию о курсовом угле радиостанции на прибор НПП из комплекта САУ (системе автоматического управления). В качестве ненаправленной антенны используется антенна командной радиостанции. Пульт управления размещен в кабине летчика, пульт настройки и приемник с блоком гониометра - в радио отсеке. ТТД радиокомпасов. ТТД АРК-19. Диапазон частот, кГц: 150 - 1299,5 Количество поддиапазонов: 5: 150 - 189,5; 190 - 269,5; 270 - 389,5; 390 - 559,5; 560 - 799,5; 800 - 1 159,5; 1160-1750 Чувствительность в режиме «Антенна», мкВ: Tперест: 2,5. Анализ таблицы показывает, что современные радиокомпасы АРК-19, АРК-15М имеют большую чувствительность, что повышает помехоустойчивость, надежность работы на больших удалениях от пеленгуемой станции; меньшую погрешность определения курсового угла, что обеспечивает навигацию ЛА с меньшими погрешностями; меньший вес и габариты, что улучшило эксплутационную технологичность и в целом характеристике ЛА, кроме итого применение интегральных микросхем и микромодулей увеличило, надежность работы радиокомпаса, эксплутационную технологичность. |
приемник; пульт управления; блок гониометра; пульт управления; антенно-согласующее устройство; блок рамочных антенн; ненаправленная антенна; пульт настройки. | ||||||||||||||||||||
24. АРК-19: Принцип работы гониометрической системыГониометрическая система - это бесконтактный преобразователь сигнала. Состоит из двух взаимно-перпендикулярных рамочных антенн, плоскость одной из которых совпадает с продольной осью самолета, а плоскость второй перпендикулярна первой, и гониометра состоящего из двух взаимно-перпендикулярных полевых, соединенных с рамочными антеннами, и искательных катушек. На каждой из двух взаимно-перпендикулярных обмоток рамочной антенны наводятся напряжения, амплитуды которых определяются по формулам: где Е - максимальное значение наводимых ЭДС, равное напряженности поля в точке приема; | При изменении направления прихода волны меняется соотношение между векторами Блок гониометра представляет из себя исполнительный орган следящей системы. В его состав входят, бесконтактный гониометр ПСГ-2 (индукционный преобразователь сигналов); компенсатор радиодевиации Система из двух взаимно перпендикулярных рамок, соединенных с гониометром, эквивалентна вращающейся рамочной антенне. Сигнал принимаемый рамкой, через высокочастотный кабель передается на полевые катушки. Поле полевых катушек наводит ЭДС в искательной катушке Сигнал с искательной катушки через индуктивный токосъем поступает на вход высокочастотного тракта АРК. Для вращения искательной катушки гониометра применяется асинхронный двигатель-генератор ДГМ-0.4Н. Вращение осуществляется через редуктор до тех пор пока искательная катушка не займет положение пеленга на принимаемую АРК радиостанцию. Для обеспечения плавного подхода искательной катушки к положению пеленга используется напряжение отрицательной обратной связи с тахогенератора. Напряжение на улравлящую обмотку двигателя подается с усилителя компасного канала с фазовым сдвигом на 90° между напряжением управляющим и возбуждения. | ||||||||||||||||||||
| |