|
|
дипломная работа вариант второй. 1 Обзор технологий, средств и платформ создание роботов манипуляторов
1.3 Обзор систем, платформ управления и разработки роботов-манипуляторов
1.3.1 Виды систем управления
Манипулятор может быть различных систем управления: гидравличе-ская, воздушная, электрическая. Пример гидравлических манипуляторов всем известные экскаваторы, краны и т.д. Промышленные роботы могут быть основаны на любом из выше перечисленных систем управления.
Пример игрушка — конструктор гидравлический робот — манипуля-тор (рисунок 5).

Рисунок 5 — Гидравлический манипулятор (Hydraulic Robot Arm)
Этот конструктор гидравлического робота-манипулятора в виде робо-тизированной клешни, которая способна поднимать и перемещать предметы весом до 50 грамм.
15
Роботы манипуляторы — укладчики, используется для складирования
перемещение разных деталей. Пример использования перемещения ради-одеталей при создании печатных плат (рисунок 6).

Рисунок 6 — Промышленные роботы
Из конструктора LEGO, можно создать робот-манипулятор. Используя блок управления Mindstorm NXT (рисунок 7).
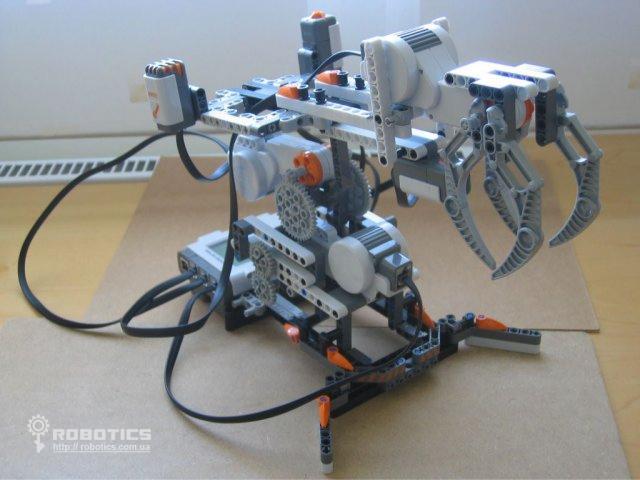
Рисунок 7 — Роботизированная рука на базе LEGO Mindstorm NXT
16
Манипулятор uArm — открытый проект манипулятора под управлени-ем Arduino. Это четырех-осевой механизм робота-манипулятора с параллель-ным механизмом, вдохновленный промышленным роботом ABB PalletPack IRB460 (рисунок 8).

Рисунок 8 — uArm манипулятора под управлением Arduino
Всех этих роботов — манипуляторов объединяет одно, они имеют си-стему управления. Для промышленных роботов используются специальные микроконтроллеры, процессоры и компьютеры, позволяющие обрабатывать информацию для движений. Для самоделок и любительских манипуляторов и роботов в основном используется недорогие платы управления Arduino, Stm32, Raspberry Pi.
1.3.2 Виды плат и платформ
Существует несколько версий платформ Arduino. Последняя версия Leonardo базируется на микроконтроллере ATmega32u4. Uno, как и преды-дущая версия Duemilanove построены на микроконтроллере Atmel ATmega328. Старые версии платформы Diecimila и первая рабочая Duemilanoves были разработаны на основе Atmel ATmega168, более ранние версии использовали ATmega8. Arduino Mega2560, в свою очередь, построе-на на микроконтроллере ATmega2560.
17
На сегодняшний день в мире присутствует много видов плат и плат-форм разной архитектурой (Advanced Virtual RISC (AVR), STM32, Raspberry Pi, компьютеров) (рисунок 9, рисунок 10 и рисунок 11) и стоимостью. AVR
— существует несколько трактовок данной аббревиатуры. Кто-то утвержда-ет, что это Advanced Virtual RISC, другие полагают, что не обошлось здесь без Alf Egil Bogen Vegard Wollan RISC.

Рисунок 9 — Платы Arduino
STM32 — семейство 32-битных микроконтроллеров производства STMicroelectronics. Чипы STM32 группируются в серии, в рамках каждой из которых используется одно и то же 32-битное ядро Advanced RISC Machine (ARM); иногда — Acorn RISC Machine (ARM) — семейство лицензируемых 32-битных и 64-битных микропроцессорных ядер разработки компании ARM Limited. например, Cortex-M7F, Cortex-M4F, Cortex-M3, Cortex-M0+ или Cortex-M0.
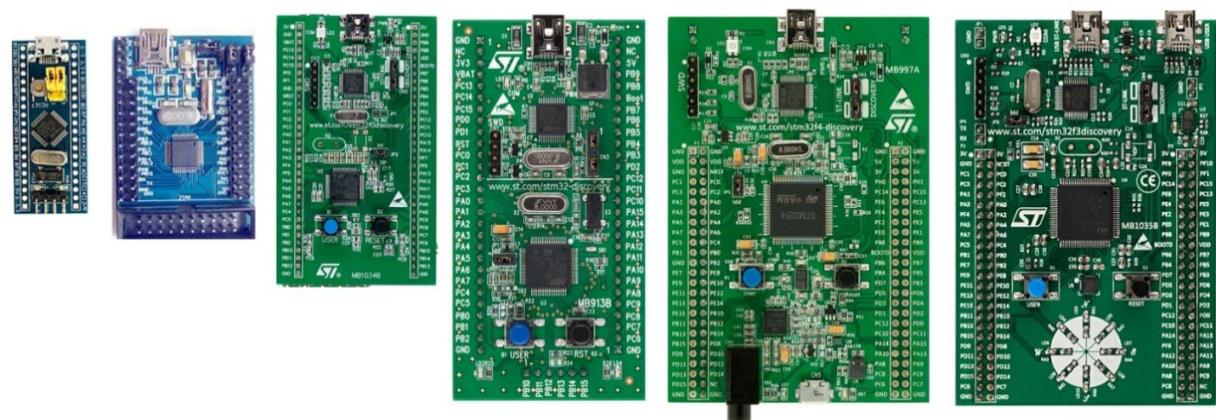
Рисунок 10 — Платы STM32
18
Ведь даже самый слабый процессор STM32 всё равно во много раз мощнее привычных AVR (Arduino) и Programmable Interrupt Controller (PIC),
стоит даже дешевле. Более того, здесь есть модули CRC, аналоговые ком-параторы и контроллер сенсорных кнопок.
Raspberry Pi — миниатюрный одноплатный компьютер в формате кре-дитной карты с возможностями большого ПК, изначально созданный для обучения базовым компьютерным наукам в школах. Может делать все, что умеет большой персональный компьютер, но помещается в 4 спичечных ко-робка.
Для разработки и создания различных роботов, манипуляторов, умных устройств. Все они обладают разными достоинствами и недостатками начи-ная от размеров и заканчивая сложностью программирования. Также суще-ствует большое количество программ для разработки и программирования этих плат. Чтобы преобразовать исходный текст программы в файл прошив-ки микроконтроллера, применяют компиляторы.
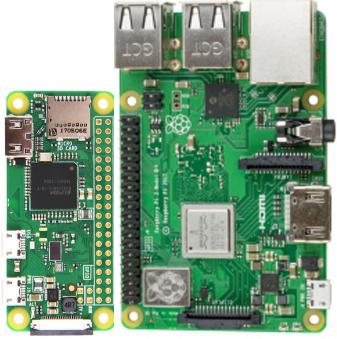
Рисунок 11 — Платы Raspberry Pi
Фирма Atmel поставляет мощный компилятор ассемблера, который входит в среду разработки Atmel Studio, работающую под Windows. Наряду с компилятором, среда разработки содержит эмулятор и отладчик.
Atmel Studio совершенно бесплатна и доступна на сайте Atmel.
19
настоящее время представлено достаточно много компиляторов Си для AVR. Самым мощным из них считается компилятор фирмы IAR Systems из Стокгольма. И множество других таких как Американской фирмой Image Craft выпускается компилятор языка Си, получивший достаточно широкую популярность. JumpStart C for AVR имеет приемлемую оптимизацию кода и демократичную цену (начиная от $50 до $499 в зависимости от версии). По-истине, культовой стала интегрированная среда разработки WinAVR. Она включает мощные компиляторы Си и ассемблера, программатор AVRDUDE, отладчик, симулятор и множество других вспомогательных программ и ути-лит. WinAVR прекрасно интегрируется со средой разработки AVR Studio от
Atmel.
Наибольшую популярность получила среда разработки и отладки Arduino IDE. За свою простоту и неприхотливость в использовании, ещё главным достоинством является ее абсолютная бесплатность и большое ко-личество плата. Разработанных для неё и поддерживаемых этой средой раз-работки в том числе STM32.
1.3.3 Программы для создания и разработки моделей
3D-моделирование представляет собой процесс использования про-граммного обеспечения для создания и представления математического трехмерного объекта или формы. Созданный объект называется 3D моделью. Для этого используются различные программы. Такие трехмерные модели используются в различных отраслях. В настоящий момент представлено большое количество специализированных программ В архитектурной, строи-тельной, кинопроизводстве, телевидении, в видеоиграх, научной и медицин-ской отраслях, а также при проектировании изделий 3D модели используют-ся для визуализации и моделирования графики. 3D Max, Blender 3D, SketchUp, AutoCAD , Inventor, SolidWorks. Только с появлением современ-ных средств трехмерного параметрического моделирования возникли реаль-
20
ные предпосылки для построения единой интегрированной системы, в кото-рой могли бы полноценно работать как конструкторы, так и дизайнеры. САПР (Система автоматизированного проектирования) SolidWorks предлага-ет пользователю полноценные инструменты для гибридного параметрическо-го моделирования, которые в сочетании с удобным пользовательским интер-фейсом делают работу в системе творческим занятием. В SolidWorks одина-ково удачно реализованы инструменты и конструктора, и дизайнера. Объем-ные построения можно выполнять самыми разными способами, сочетая твердотельное и поверхностное моделирование, указывая точные размеры или изменяя форму объектов на глаз. Убедительным примером могут послу-жить изделия, спроектированные в системе автоматизированного проектиро-вания (САПР) SolidWorks, которые были представлены на выставках SolidWorks World и промо-роликов.
Программа SolidWorks — для конструкторского твердотельного и по-верхностного параметрического моделирования. создание параметрической модели, генерация чертежей, создание сборок, использование стандартных библиотек элементов.
21
РАЗРАБОТКА РОБОТОТЕХНИЧЕСКОГО МАНИПУЛЯТОРА «РУКА»
2.1 Характеристики манипулятора
Манипулятор должен представлять вид руки человека с подвижными суставами пальцев и кисти. Выполнен из легких материалов. Быть энергоавтономным, с возможностью дистанционного управления и программирования с ПК. Быть ремонтопригодным и состоять из недорогих комплектующих.
Дистанционное управление будет осуществляться при помощи перчатки со встроенными датчиками изгиба.
2.2 Структура и назначение модулей манипулятора
Интерактивный манипулятор состоит из двух блоков: собственно, сам манипулятор «Рука» (движение ладони, сгибание разгибание пальцев в за-данном диапазоне (реагирование на голосовые команды))
.
Целью данной работы является разработка кинематической схемы трехстепенного манипулятора и построение трёхмерной модели его кон-струкции, моделирование компьютерной динамической модели манипулято-ра, выполнить анализ движения модели робота при различных условиях, определить некоторые характеристики робота на основе моделирования, проектирование отдельных деталей и изготовление их при помощи 3D печа-ти, сборка робота, разработка системы управления манипулятором на основе Arduino. Функционал манипулятор заключается в отображение различных жестов (приветствия, прощания, отображение разжатием или сжатием названных цветов или название пальцев и показывание различных жестов, запрограммированных в микроконтроллере). Пальцы и ладонь манипулятора выполнены цветами радуги, начиная с указательного пальца; красный — ука-зательный, средний — оранжевый, безымянный — жёлтый, мизинец — зелё-ный, большой палец — голубой, ладонь — синяя, запястье — фиолетовое, корпус руки — выполнен в виде рукава костюма серого цвета (рисунок 12).

Рисунок 12 — Рука манипулятор
23
Функционал интерфейс Android-приложения заключается в двух кноп-ках на экране устройства. Первая кнопка предназначена для создания соеди-нения устройства по Bluetooth с микроконтроллером манипулятора, вторая кнопка на экране устройства предназначена для ввода голосовых команд (ри-сунок 13).
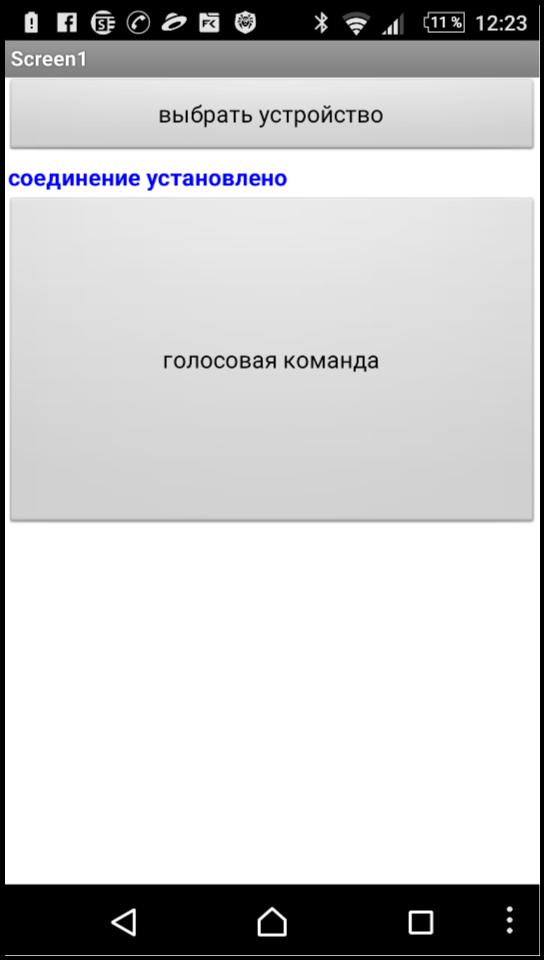
Рисунок 13 — Интерфейс Android-приложения
Интерфейс приложение выполнен в простом классическом стиле, так как основная функция его заключается в распознавание команд. Для эргоно-мичности кнопка распознавания голосовых команд выполнена в довольно большом размере.
2.3 Обоснование выбора технологии проектирования для всех элементов проекта
Для создания и разработки манипулятора была выбрана программа SolidWorks.
24
настоящее время существует много программ которые позволяют разрабатывать и проектировать любые модели, например, AutoCAD, SolidWorks, 3D Max, существует много онлайн программа для разработки и проектирования моделей. Выбор остановился на SolidWorks, так как она яв-ляется программа для твердотельного моделирования и позволяет сохранять модель детали в любом нужном формате подходящих для 3D печати, также в SolidWorks можно посмотреть механику движения всех частей модели и про-считать нужные элементы и взаимодействия их.
Для изготовления манипулятора использовался самодельный 3D прин-тер, который был разработан в SolidWorks. Программное обеспечение для принтера было выбрано Repetier-Host, так как она является в первую очередь бесплатным и с открытым кодом, что очень удобно для модернизации и до-бавление нужных функции и настроек. Для обработки 3D моделей и перевода
формат для 3D принтера пользовалась программой слайсер simplify3d, ко-торая является платной данный момент и считается одной из лучших для слайсинга программ. За время эксплуатации она показала себя как самая кор-ректная программа для обработки 3D моделей и подготовки модели для 3D печати.
Для создания Android-приложения использовалась программа MIT App inventor, её выбор был обоснован тем, что она является средой визуальной разработки Аndroid приложений, требующая от пользователя минимальных знаний программирования и не надо знать синтаксис языка Java для создания приложения. Любой даже ребёнок сможет создать или изменить приложение созданная для Android телефона в MIT App inventor.
Для управления манипулятором был использован микроконтроллер Arduino nano. Его выбор был обоснован маленькими размерами и простотой программирования. Для его программировали была использована среда раз-работки Arduino IDE. Язык программирования устройств Arduino основан на C/C++. Он прост в освоении и на данный момент Arduino — это, пожалуй, самый удобный способ программирования устройств на микроконтроллерах.
25
среда разработки Arduino IDE присутствует много различных библиотек, которые помогают при создании программа для программирования микро-контроллеров.
2.4 Характеристики оборудования для реализации интерактивного манипулятора
проекте использовалось оборудование: понижающий модуль питания для питания микроконтроллера (рисунок 14).

Рисунок 14 — Модуль питания, понижающий преобразователь на LM2596
основным характеристикам модуля питания direct current (DC) — DC (постоянный ток) понижающего преобразователя на LM2596:
• входное напряжение 4,5–28 В;
• выходное регулируемое напряжение 0.8–20 В;
• выходной ток 3 А;
• рабочая частота 1 МГц;
• эффективность 96 %;
• рабочая температура –40 C – +85 C;
• размер: 22 х 17 х 4 мм.
26
Для питания манипулятора используются аккумуляторные батареи Sanyo NCR18650BF 3400 мАч 3.6 В (рисунок 15).

Рисунок 15 — Аккумулятор Sanyo NCR18650BF 3400 мАч 3.6 В
Аккумулятор Sanyo NCR18650BF 3400 мАч 3.6 В обладают следую-щими техническими характеристиками:
производитель Sanyo (Япония);
номинальная емкость 3350 мАч (при токе 0,3 C);
минимальная емкость 3250 мАч;
напряжение номинальное 3,6 В;
максимальное напряжение 4,2 В;
минимальное напряжение 2,5 В;
максимальный ток заряда 1,6 А;
максимальный ток разряда 6,8 А;
плата защиты присутствует;
диаметр (+–0,2 мм) 18,6 мм;
длина (+–0,2 мм) 69,2 мм;
27
Для управления сервомоторами манипулятора был выбран микро-контроллер Arduino (рисунок 16).
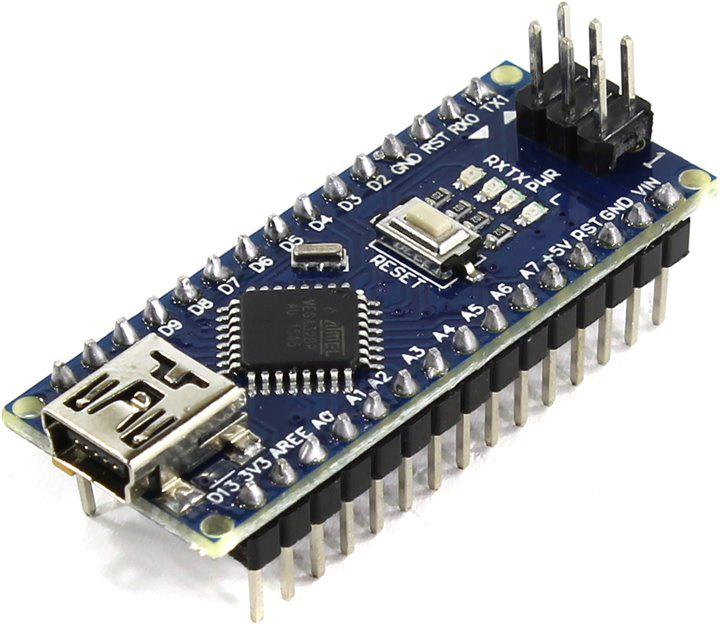
Рисунок 16 — ATmega328 (Arduino Nano V3.0)
С характеристиками:
микроконтроллер Atmel ATmega328;
рабочее напряжение (логический уровень) 5 В;
входное напряжение (рекомендуемое) 7–12 В;
входное напряжение (предельное) 6–20 В;
цифровые Входы/Выходы 14 (6 из которых могут использоваться как выходы Широтно-Импульсной Модуляции (ШИМ));
постоянный ток через вход/выход 40 мА;
флеш — память 32 Кб (ATmega328) при этом 2 Кб используются для загрузчика;
оперативное запоминающее устройство (ОЗУ) 2 Кб (AT-mega328);
Electrically Erasable Programmable Read-Only Memory (EEPROM)
Кб (ATmega328);
Для передачи данных от Android устройства к микроконтроллеру Arduino был выбран Bluetooth модуль (рисунок 17).
28
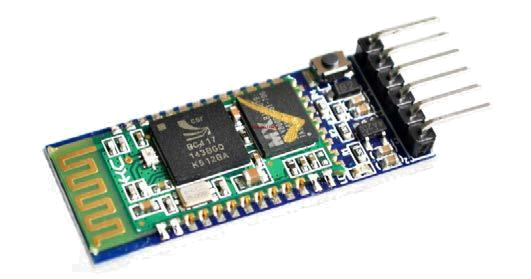
Рисунок 17 — Bluetooth модуля HC-05
техническими характеристиками Bluetooth модуля HC-05:
• протокол связи bluetooth specification v2.0+edr;
• частота GFSK (Gaussian Frequency Shift Keying);
• мощность отправки ≤4 dBm, Class 2;
• мощность приема ≤–84 dBm at 0.1% BER;
• скорость асинхронная 2.1 Mbps(Max) / 160 kbps, синхронная 1 Mbps/1 Mbps;
безопасность Authentication and encryption;
профиль Bluetooth serial port;
+75 C;
размеры 26.9 мм х 13 мм х 2.2 мм. Подключение Bluetooth модуля HC-05 к Arduino:
RXD — на этом пине модуль принимает данные (то есть в вашем скетче сюда надо отсылать данные);
TXD — сюда модуль отправляет данные;
29
EN — вкл/выкл, если подать сюда логическую единицу (или просто 5 В), то модуль выключится, если логический ноль (или просто не подклю-чать этот пин) будет работать.
Для движения пальцев ладони руки манипулятора выбраны серводви-гатели (рисунок 18).

Рисунок 18 — Серводвигатель SG90
Серводвигатель SG90 analog servo — это аналоговый серводвигатель с крутящим моментом 1.8 кг. см при напряжении 4.8 В и диапазонов вращения 180°, идеально подходит для робототехники. Характеристики серводвигателя SG90:
напряжение питания: 4.8…6 В;
крутящий момент: 1.8 кг. см при 4.8 В;
скорость вращения: 60 за 0.12 сек при 4.8 В;
внутренний интерфейс: аналоговый;
направление: CCW (против часовой стрелки);
материал шестерней: нейлон;
материал корпуса: пластик;
30
габариты: 23 × 12.2 × 29 мм;
Для съемки видео-, фото- материала и управления манипулятором с помощью мобильного приложения использовался телефон с операционной системы Android (рисунок 19).

Рисунок 19 — Sony Xperia Z2
Основные технические характеристики Sony Xperia Z2:
операционная система — Android;
Процессор Qualcomm Snapdragon 801:
оперативная память — 3072 МБ;
флэш-память — 16384 МБ. Экран:
диагональ — 5.2;
разрешение — 1920 x 1080;
цветопередача — 16 млн. цветов;
фотокамера — 20.7 млн. пикс. Питание:
время в режиме работы — 13.5 ч;
время в режиме ожидания — 880 ч.
31
Компьютер с операционной системой Windows 8.1 (рисунок 20) ис-пользовался для создания 3D модели манипулятора в SolidWorks 2016. Напи-сание приложения для Android телефона и программирование микроконтрол-лера Arduino Nano. Также на компьютере производилась подготовка моделей в программе Simplify3d для печати на 3D принтере.

Рисунок 20 — ASUS ROG G750JM
Краткие характеристики:
операционная система — Microsoft Windows 8.1;
o производитель — Intel;
o модель — Core i7-4700HQ;
o тактовая частота (МГц) — 2400;
память — объем (МБ): 16384.
Для печати 3D моделей доля руки манипулятор был использован 3D принтер, разработанный и изготовленный самостоятельно (рисунок 21).
32
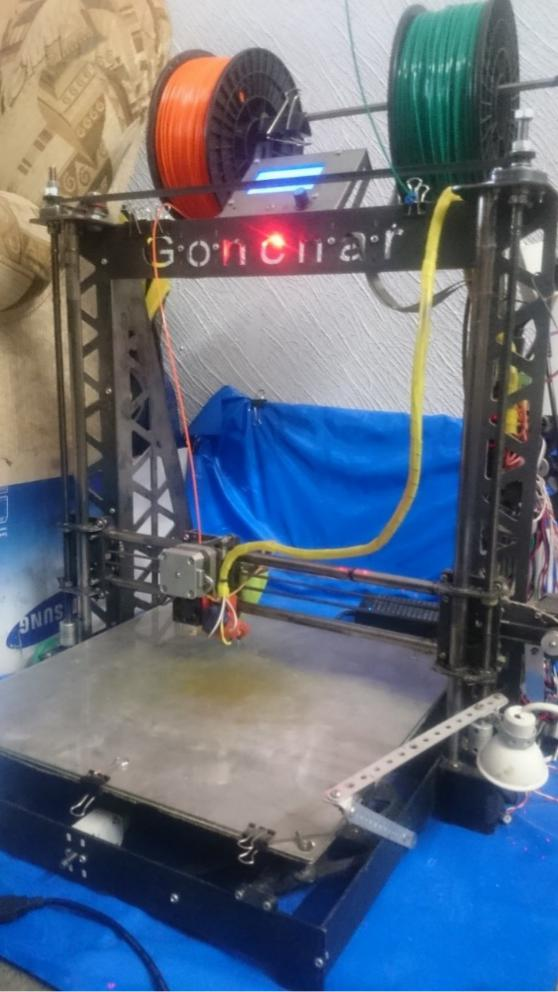
Рисунок 21 — 3D принтер
Технические характеристики 3D принтера PRUSA I3 GONCHAR:
технология печати: моделирование моделирование методом наплавления fused deposition modeling (FDM);
количество печатающих головок — 1;
диаметр сопла (мм) — 0,4;
область построения, мм:320x320x300;
толщина слоя (мм) — 0,06–0,3;
скорость печати — 40–60 мм/сек;
платформа — подогреваемая;
интерфейсы — Card Reader, USB;
Габариты:
размеры (мм): 550 x 500 x 650;
33
Расходные материалы для 3D принтера PRUSA I3 GONCHAR:
типы материалов — пластик;
материалы: акрилонитрилбутадиенстирол — Acrylonitrile butadiene styrene (ABS) — пластик, полилактид — polylactide (PLA) — пластик;
диаметр нити (мм) — 1,75.
Программное обеспечение для работы 3D принтера PRUSA I3 GON-CHAR: Simplify3d, Cura Software, Slic3r, Repetier, Kisslicer. |
|
|
 Скачать 7.1 Mb.
Скачать 7.1 Mb.