дипломная работа вариант второй. 1 Обзор технологий, средств и платформ создание роботов манипуляторов
 Скачать 7.1 Mb. Скачать 7.1 Mb.
|

|
2.5 Общий алгоритм реализации робота манипулятора «Рука» Создание робота-манипулятора осуществлялось в десять этапов. На первом этапе необходимо было представить кинематику, механику, электронику и программное обеспечение, которое подойдет для создания ро-бота-манипулятора. Чтобы электроника была маленького размера и недоро-гой себестоимости и в случае поломки можно было легко заменить. Требова-ния к механической части тоже были основаны на простате, чтобы было как можно меньше сложных механических элементов. Было принято решение повторить принцип работа человеческой руки на сухожилиях. Для чего вме-сто сухожилий была использована капроновая нить, которая впоследствии была заменена леской. На втором этапе создавалась 3D модель руки и моделирование всех элементов электроники и механики. Для этого использовала специализиро-ванная программа SolidWorks, которая с легкостью позволила воплотить идеи и мысли в реальную модель и провести механический анализ движения всех элементов. Третий этап — этап разработки элементов дизайна проекта. Необходи-мо продумать внешний вид модели и функционал манипулятора. Также визу-ально понять, как будет выглядеть манипулятор с выбранными цветами эле-ментов. 34 На четвертом этапе происходит подготовка к печати деталей манипу-лятора руки на 3D принтере. Для этого был использован самодельный 3D принтер под управлением программой repetier host. Для перевода stl модели в g-code использовался слайсер simplify3d. Выбор этих программ был обуслов-лен тем что они являются лучшими для управления и обработки на данный момент из доступных. Печать деталей производилась ABS пластиком разных цветов слоем 0,2 мм и стало одним из самых продолжительных этапов созда-ние манипулятора. На пятом этапе — сборка действующего прототипа. Для проверки ра-ботоспособности собрать часть манипулятора и проверить верность концеп-ции. На шестом этапе происходит обработка деталей. Доведение все деталей манипулятора до пригодного сборочного состоя. Доводка напильником, наждачной бумагой, обработка парами растворителя для придания гладкости и прочности. На седьмом этапе идет сборка и наладка механической части руки ма-нипулятора. Сборка деталей суставов пальцев (установка подшипников). Сборка и установка сервомоторов, сборка корпуса, подключение всех элек-трических компонентов: модули питания, управление (Bluetooth модуля), ак-кумуляторов, серводвигателей, доводка деталей при необходимости. Восьмой этап — этап создания Android-приложения для голосового управления рукой манипулятор. Приложение было разработано или реализо-вано в программе MIT App invertor2. На девятом этапе разработка и создание управляющие программы для микроконтроллера манипулятора (Arduino nano). Для этого использовалась среда разработки Arduino IDE (основанная на С/С++). Десятый этап — программирование и отладка руки манипулятора, те-стирование и отладка. Поиск богов и ошибок (подключения и настроек). Проверка работоспособности. 35 2.6 Описание этапов создания руки манипулятора 2.6.1 Этап эскизного проектирования Первый этап проекта — осмысление механики движения и управления, для использованных компонентов. Анализ и подбор модулей управления, движения и программного обеспечения для создания манипулятора, и про-граммного обеспечения. Создание эскизов (рисунок 22). Создания манипулятора был расчёт и осмысление кинематики, механи-ки, электроники и программного обеспечения которая подойдет для нашего проекта. Чтобы электроника была маленького размера и недорогой себестои-мости и в случае поломки можно было легко заменить. Требования к меха-нической части тоже были основаны на простате, чтобы было как можно меньше сложных механических элементов. Было принято решение повторить принцип работы человеческой руки на сухожилиях. Для чего вместо сухожи-лий была использована капроновая нить, которая впоследствии была замене-на леской. 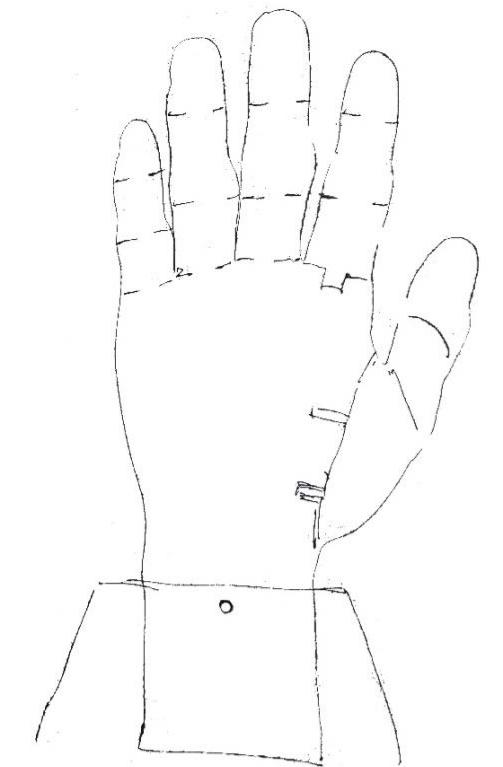 Рисунок 22 — Эскиз руки манипулятора 36 Разработка подключений электрической принципиальной схемы, под-ключение сервомоторов и Bluetooth модуля (рисунок 23). 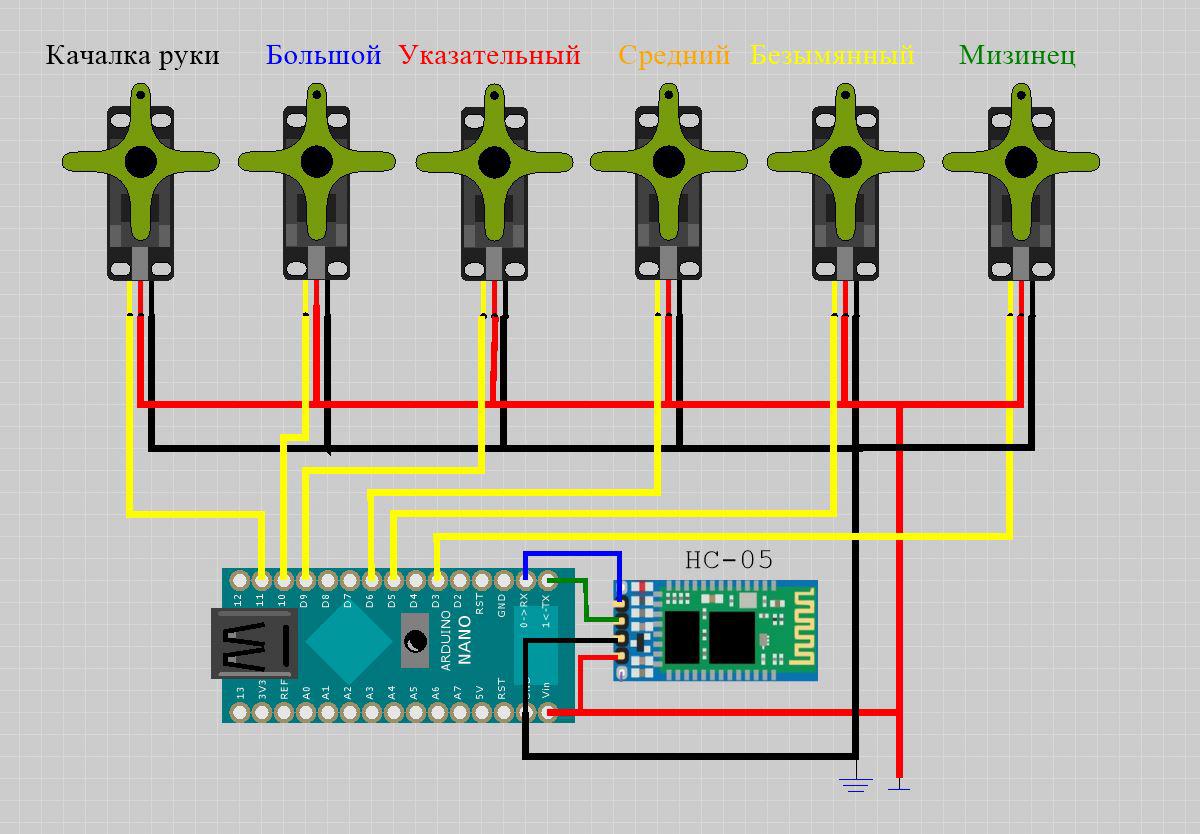 Рисунок 23 — Схема подключение сервомоторов и Bluetooth модуля На осмысление, расчёт примерный механики движения, создание эски-зов, разработку принципиальной электронной схемы для управления мани-пулятором примерно было затрачено около 30 часов. 2.6.2 Разработка 3D модели Вторым этапом задачи будет — создание 3D модели руки и всех ком-понентов, таких как подшипники, сервомоторы и элементы использованных проекте, в программе SolidWorks. Пример смоделированных элементов (рисунок 24, рисунок 25). Создана сборка из смоделированных элементов для осмысления внутренней компоновки и расположения внутри руки-манипулятора. 37 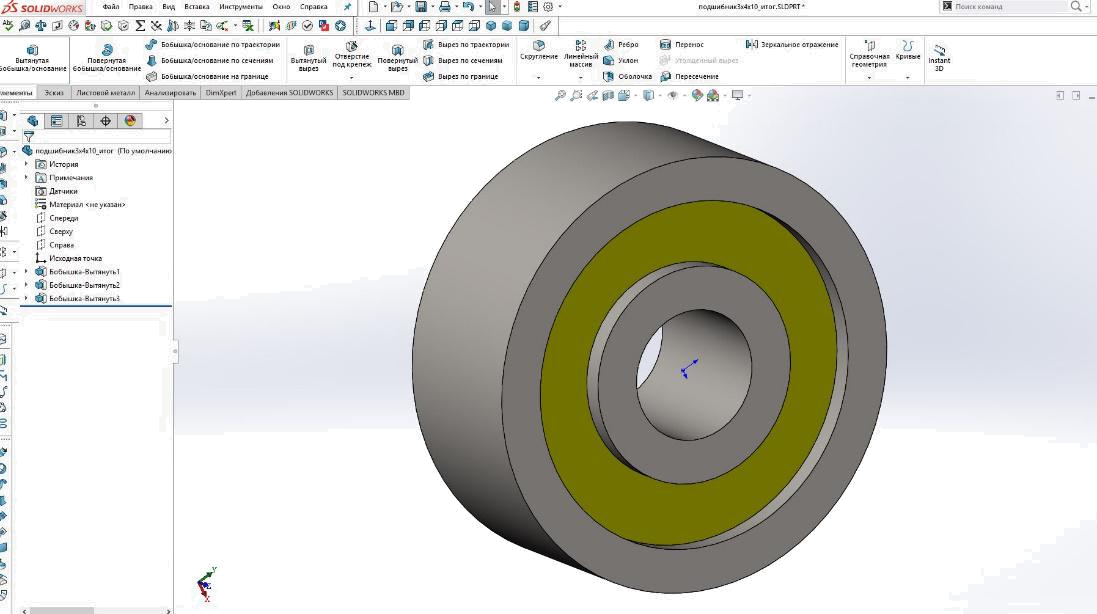 Рисунок 24 — Моделирование подшипника в программе SolidWorks 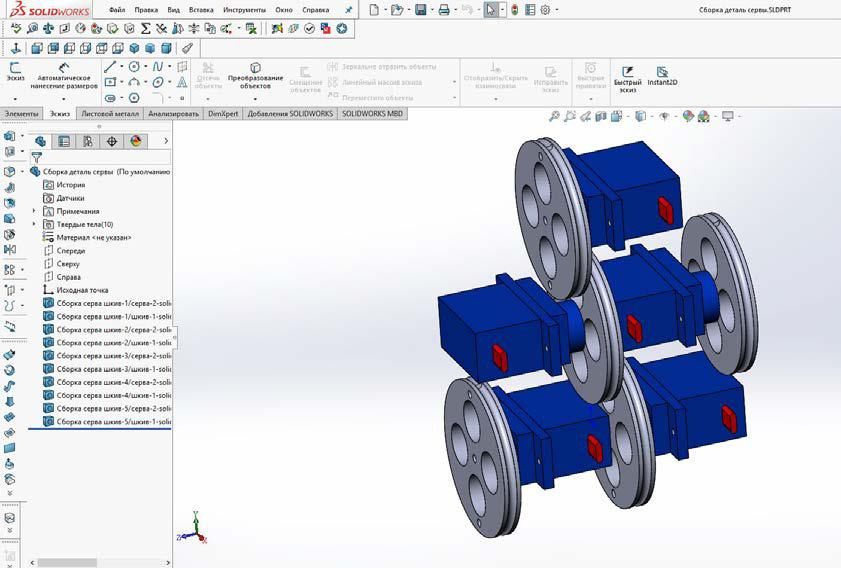 Рисунок 25 — Моделирование, сборка сервомоторов SolidWorks 2.6.3 Этап разработки элементов дизайна проекта Была осмыслена цветовая гамма элементов и конструкции запястья (рисунок 26). 38 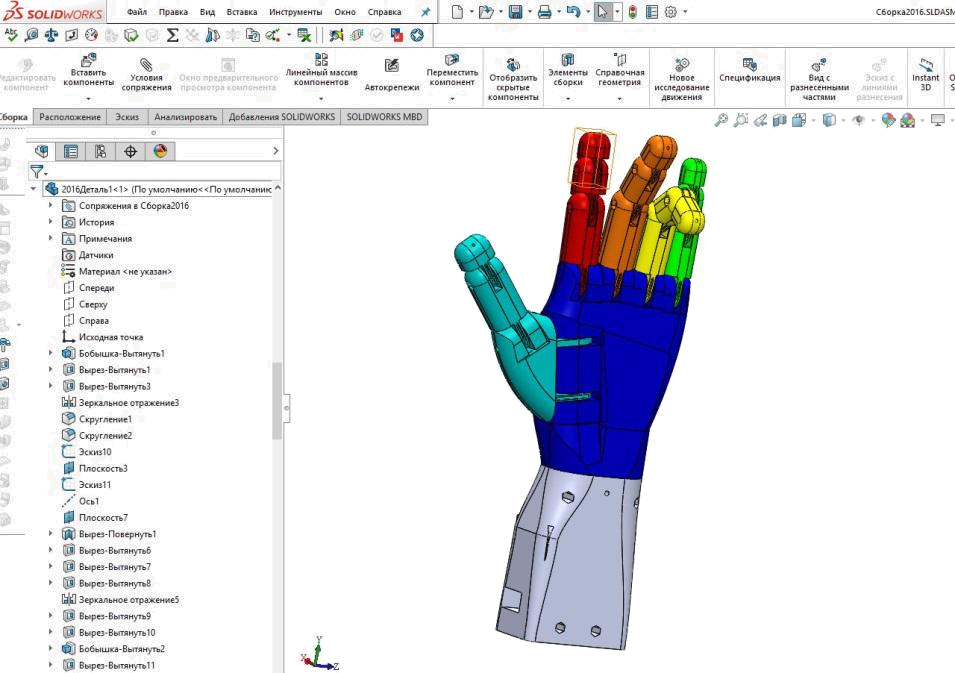 Рисунок 26 — Первоначальный вариант 3D модель руки Внесение изменений в конструкцию запястья и выбор другого цвета детали (рисунок 27). 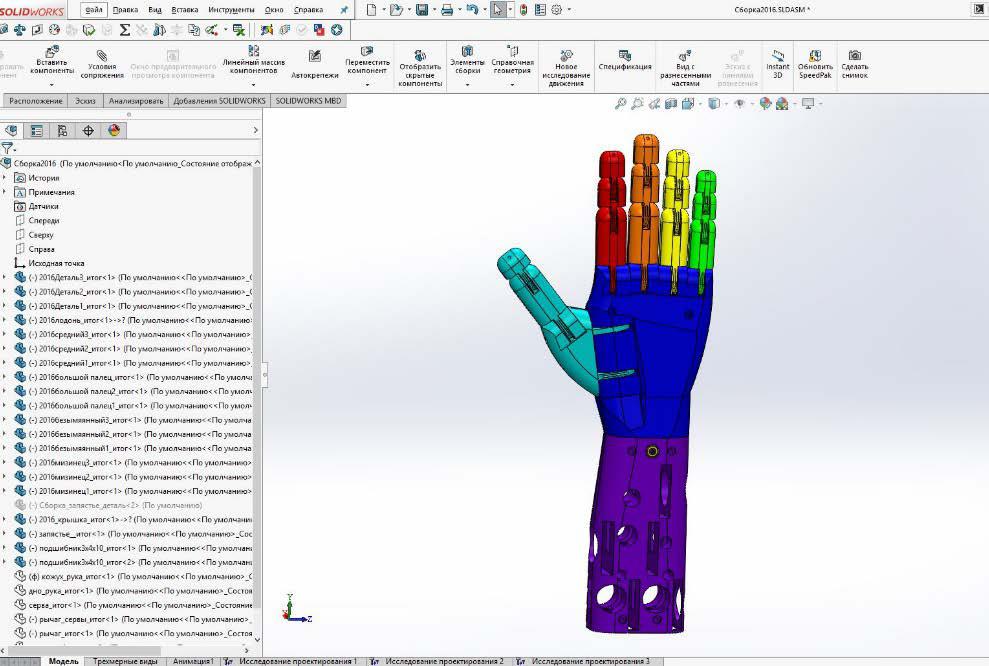 Рисунок 27 — Доработанная 3D модель руки При разработке кожух (рукав) руки-манипулятора (рисунок 28), при рассмотрении движения в SolidWorks, оказался не работоспособным. 39 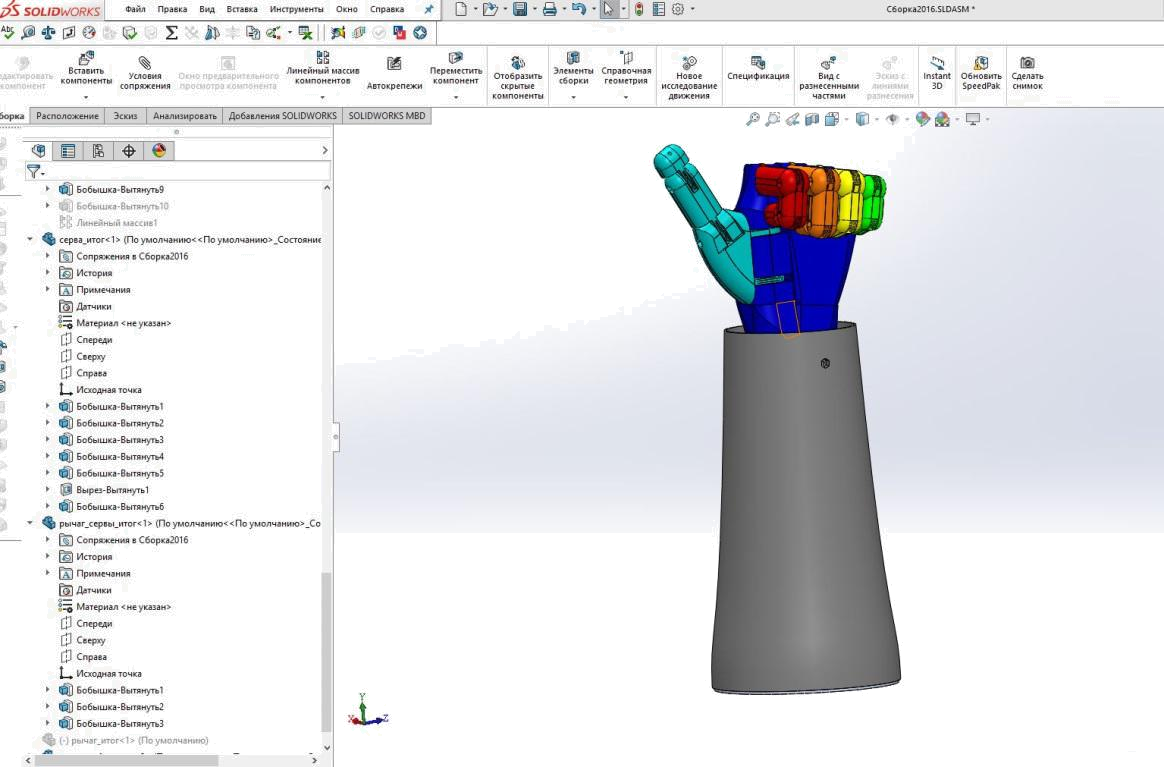 Рисунок 28 — Промежуточный дизайн Для этого был пересмотрен дизайн создания кожуха, была изменена высота и ширина нижней части модели (рисунок 29). 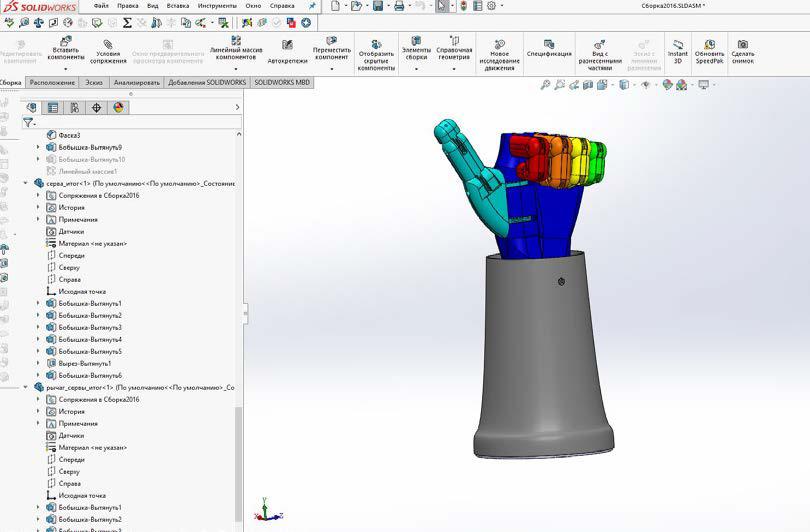 Рисунок 29 — Окончательный дизайн Проверка движения «руки» модели в программе SolidWorks в кожухе (рукаве) в различных направлениях (рисунок 30, рисунок 31). 40 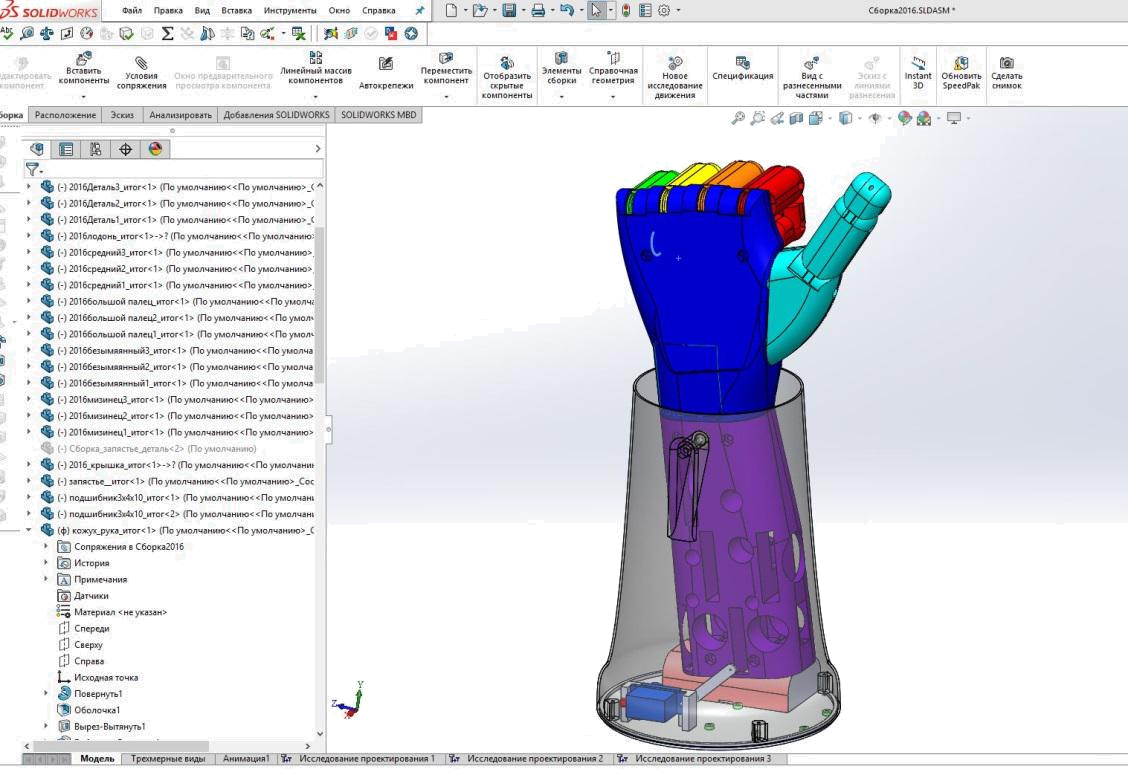 Рисунок 30 — Анализ движения ладони вправо 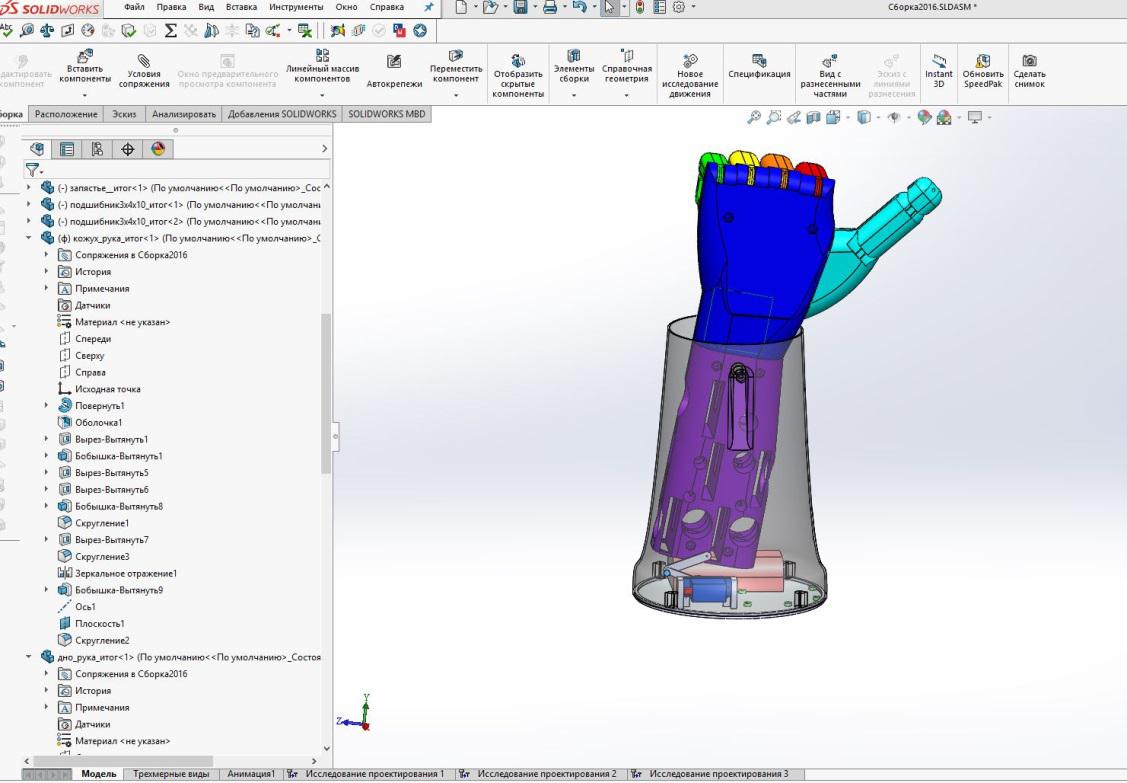 Рисунок 31 — Анализ движения ладони влево Создание 3D модели руки и моделирование всех элементов электрони-ки и механики. Для этого была использована специализированная программа SolidWorks, которая с легкостью позволила воплотить идеи и мысли в реаль-ную модель и провести механический анализ движения всех элементов. Так-же визуально понять, как будет выглядеть манипулятор с выбранными цве-тами элементов. 41 На анализ и разработку 3D модели, выбор цветов, отработка движений исправление ошибок модели примерно было затрачено 240 часов. Выбор цветов был основан на палитре радуги, для возможности перечисление цве-тов радуги по пальцам и так как они являются одними из основных цветов в нашей жизни. 2.6.4 Этап подготовки и печати моделей на 3D принтере Изготовление манипулятора руки производилось на 3D принтере (ри-сунок 32). Печать производится пластиком ABS разных цветов. 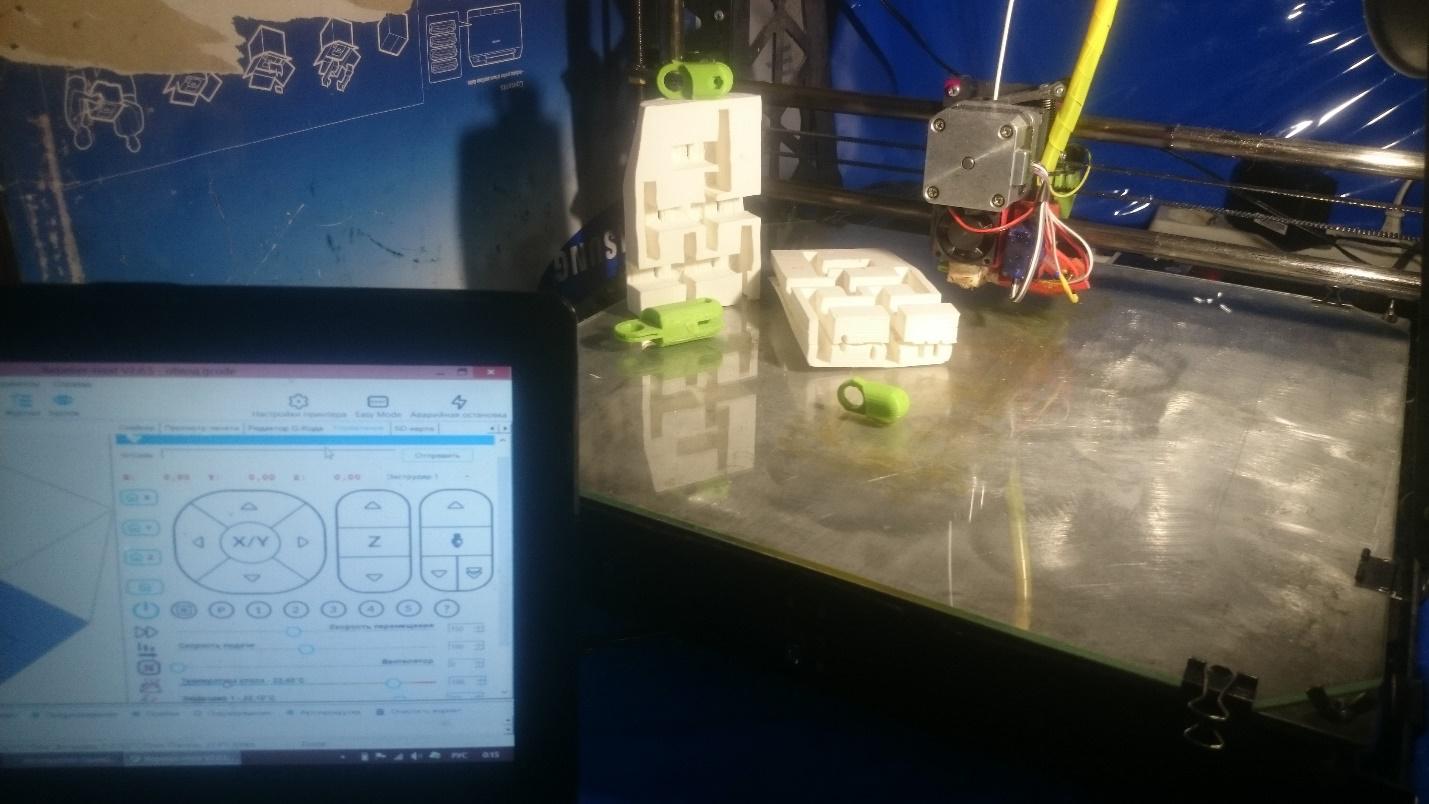 Рисунок 32 — 3D принтер Подготовка модели к печати производилось в программе Simplify3d (рисунок 33). Параметры печати; толщина слоя 0.2мм, скорость перемещения 5 000 мм/мин., температура сопла 240 градусов, нагрев стола 100 градусов. Simplify3 — программное обеспечение 3D печати позволяет управлять всеми аспектами 3D печати, оно преобразует 3D модели в инструкции, которые по-нимает принтер. 42 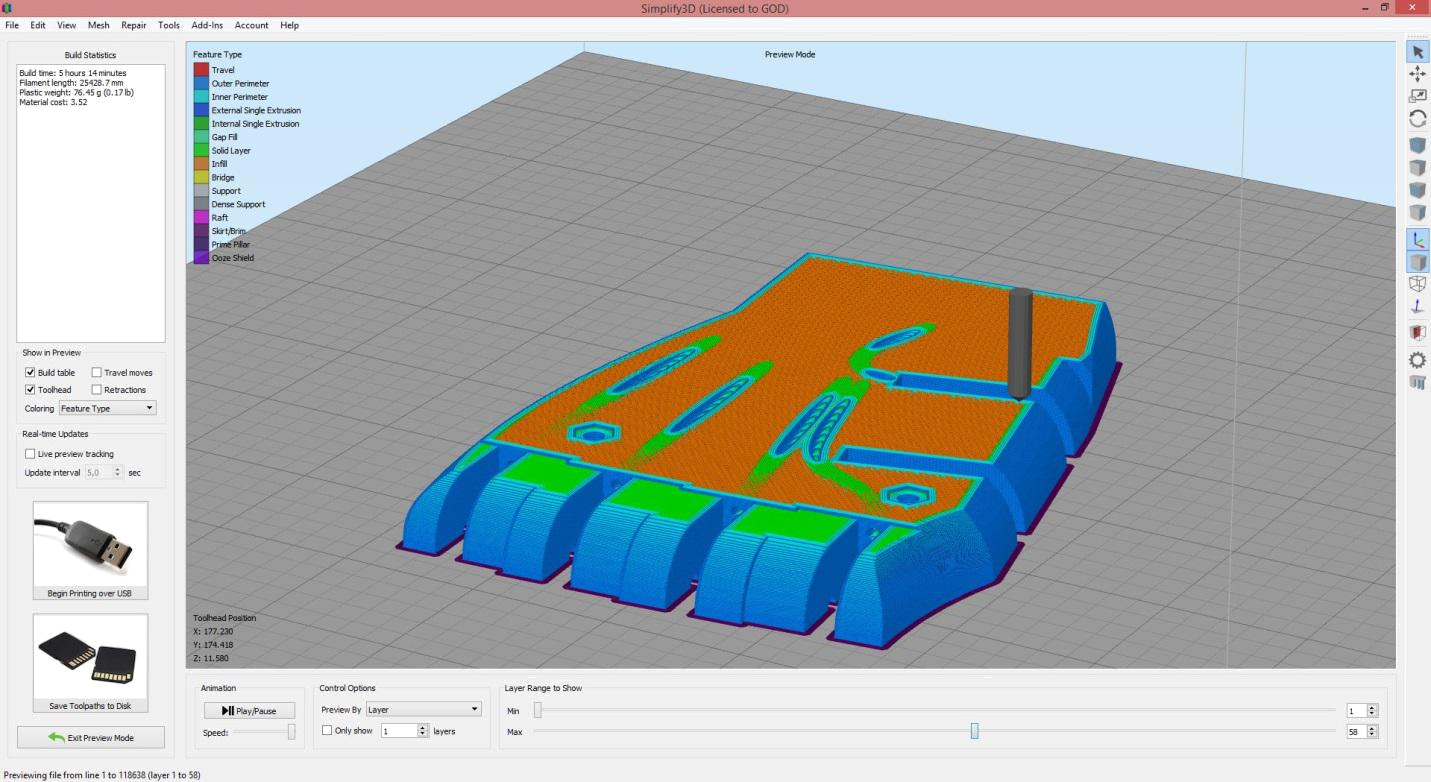 Рисунок 33 — Слайсинг в Simplify3d. Печать производилась с помощью программного обеспечения Repetier Host для управления 3D принтером, это получился один из самых продолжи-тельных этапов производства и изготовления манипулятора, около 50 часов (рисунок 34, рисунок 35, рисунок 36).  Рисунок 34 — Печать детали ладони 43 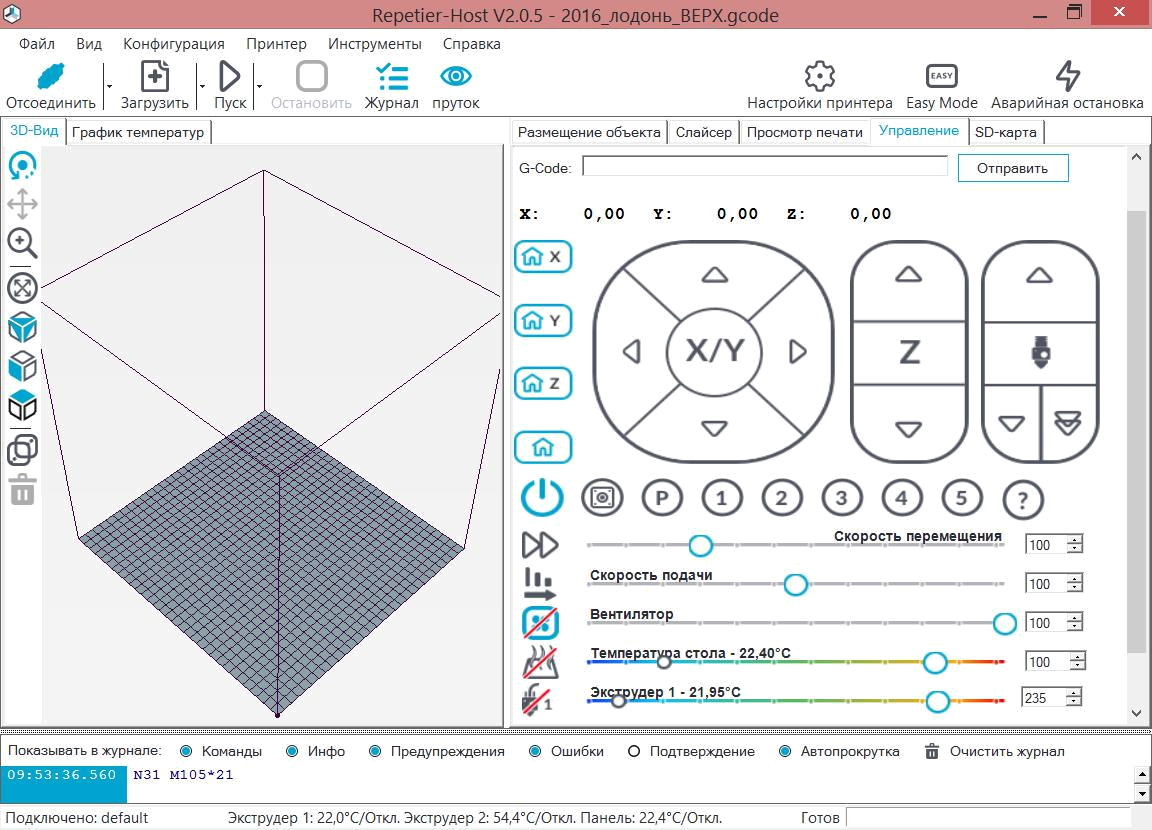 Рисунок 35 — Панель управления принтером программы Repetier Host Выбор этих программ был обусловлен тем что они являются лучшими для управления и обработки на данный момент из доступных (бесплатных). Печать деталей производилась послойно ABS пластиком слоем 0,2 мм и ста-ло одним из самых продолжительных этапов создание манипулятора. 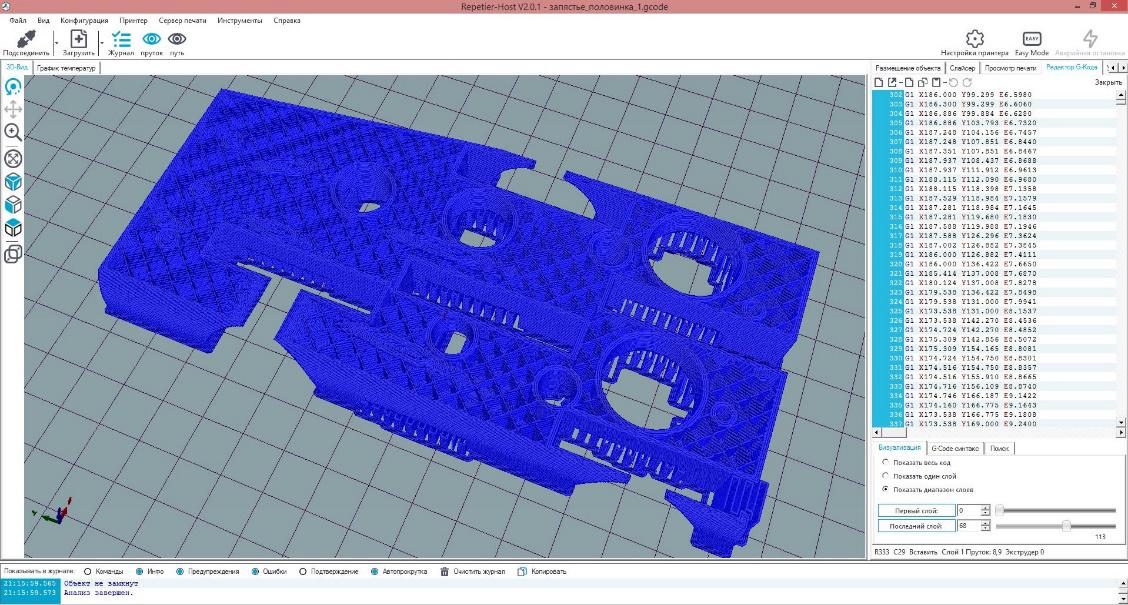 Рисунок 36 — Печать детали запястья под управлением программы Repetier Host 44 2.6.5 Сборка действующего прототипа (пальца) Модуль роботизированной руки-манипулятора и проверка его работо-способности представлены на (рисунок 37). 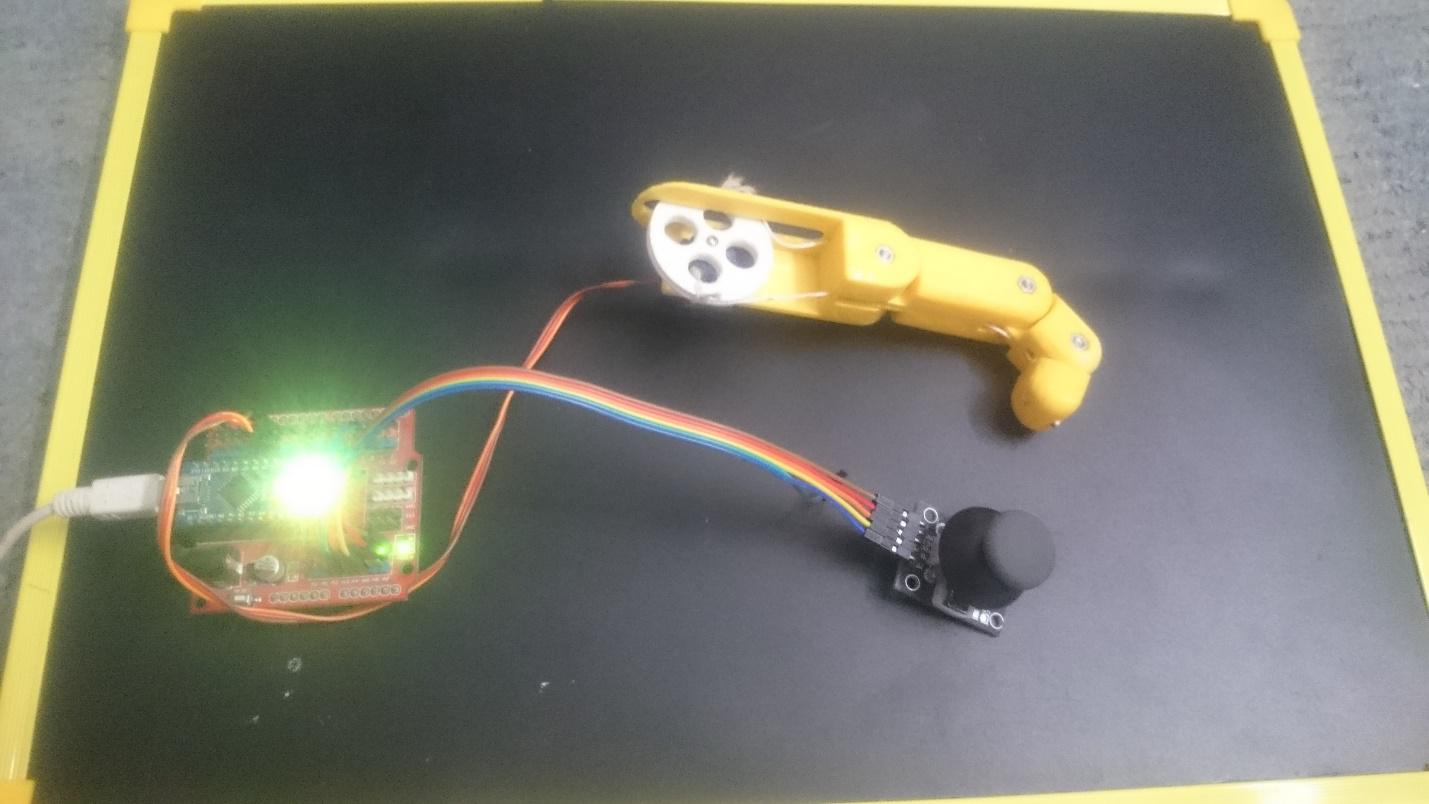 Рисунок 37 — Прототип (палец) Прототип интерактивного манипулятора «Рука» — это частичная или возможная реализация предлагаемого нового продукта. Прототипы позволя-ют решать 3 основные задачи: Прояснение и завершение процесса формулировки требований. Ис-пользуемый в качестве формулировки требований прототип представляет со-бой предварительную версию части системы, понимание которой вызывает затруднения. Оценка прототипа пользователями указывает на ошибки в фор-мулировке требований, которые можно исправить без больших затрат до со-здания реального продукта. Исследование альтернативных решений. Прототип, как инструмент конструирования, позволяет заинтересованным в проекте лицам исследовать различные варианты реализации взаимодействия пользователей, оптимизи-ровать удобство работы и оценить возможные технические приемы. Прото- 45 типы позволяют на рабочих образцах показать, насколько осуществимы тре-бования. Создание конечного продукта. Используя в качестве инструмента разработки прототип — не что иное, как функциональная реализация пер-вичных элементов системы, которую можно превратить в готовый продукт, осуществляя последовательную цепочку небольших циклов разработки. Основная цель создания прототипа — устранение неясностей на ран-них стадиях процесса разработки. Прототипы, особенно наглядные, легче понять, чем технический жаргон разработчиков. 2.6.6 Обработка деталей Для создания деталей руки применялись аддитивные технологии. В ка-честве материала использовал разноцветный прочный пластик ABC. Он пол-ностью безопасен и нетоксичен. Поверхность деталей манипулятора немного шероховатая, но сделать ее более гладкой и прочной, приятной на ощупь, позволило применение ацетоновой бани (рисунок 38).  Рисунок 38 — Ацетоновая баня (обработка деталей парами ацетона) 46 2.6.7 Сборка руки манипулятора Сборка и наладка механической части руки манипулятора. Сборка де-талей суставов пальцев (установка подшипников). Сборка и установка сер-вомоторов (рисунок 39).  Рисунок 39 — Сборка запястья и ладони Подключение электроники, установка платы Arduino и установка сер-вомоторов, сборка корпуса, подключение всех электрических компонентов: модули питания, управление (Bluetooth модуля), аккумуляторов, серводвига-телей, доводка деталей при необходимости (Рисунок 39). 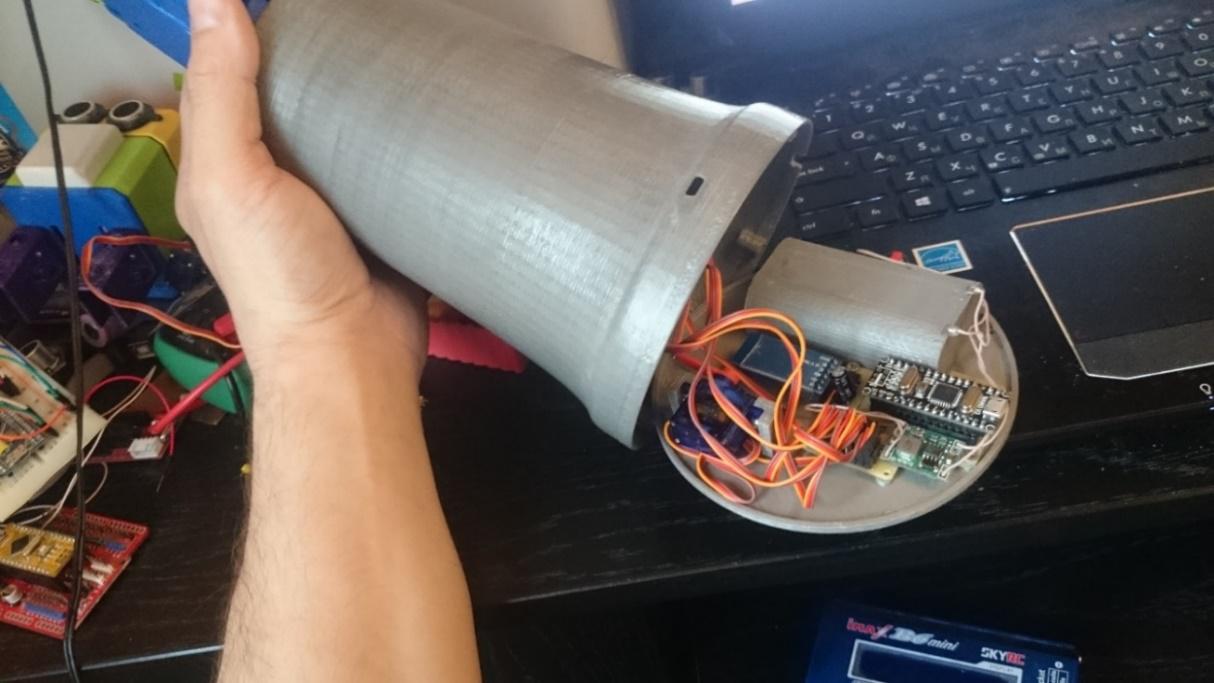 Рисунок 40 — Сборка, подключение электроники 47 2.6.8 Создание модуля голосового управления Следующий этап представляет собой создание модуля голосового управления на базе сотовые телефоны на операционной системе (ОС) Android. Приложение было разработано в программе MIT App inventor2. App Inventor — среда визуальной разработки Android-приложений, требую-щая от пользователя минимальных знаний программирования. Первоначаль-но разработана в Google Labs, после закрытия этой лаборатории была пере-дана Массачусетскому технологическому институту. Для программирования в App Inventor используется графический ин-терфейс, визуальный язык программирования, очень похожий на языке Scratch и StarLogo TNG (рисунок 41).  Рисунок 41 — App Inventor Block Editor Компилятор, переводящий визуальный блочный язык App Inventor в байт — код Android, основан на фреймворке GNU для реализации динамиче-ских языков Kawa, реализующего (в числе прочего) Scheme (диалект лиспа) для java платформы (и Android). Данный программный продукт разработан в компании Google с ис-пользованием Java библиотеки Open Blocks, разработанной в MIT [31]. После решения о закрытии Google Labs компания объявила и о прекращении рабо-ты над проектом. Вместе с тем было объявлено о намерении сделать данное приложение открытым, с возможным последующим использованием его в образовании. Вслед за этим массачусетский технологический институт со-общил об открытии нового центра мобильного обучения на базе данного 48 программного продукта, одним из профессоров которого станет создатель скретча Митчелл Резник. начале марта 2011 года Массачусетский институт запустил публич-ную бета — версию проекта, доступную на сайте appinventor.mit.edu. 2.6.9 Создание управляющей программы для микроконтроллера Arduino Nano v 3.0 Для создания управляющей программы микроконтроллера использова-лась программное обеспечение Arduino IDE. При написании кода создание управляющей программы для микроконтроллера манипуля-тора (Arduino nano). Для этого использовалась среда разработки Arduino IDE (основанная на С/С++). Интерфейс Arduino IDE представлен на (Рисунок 42). Для создания управляющей программы использовалась библиотека Servo.h и VarSpeedServo.h. 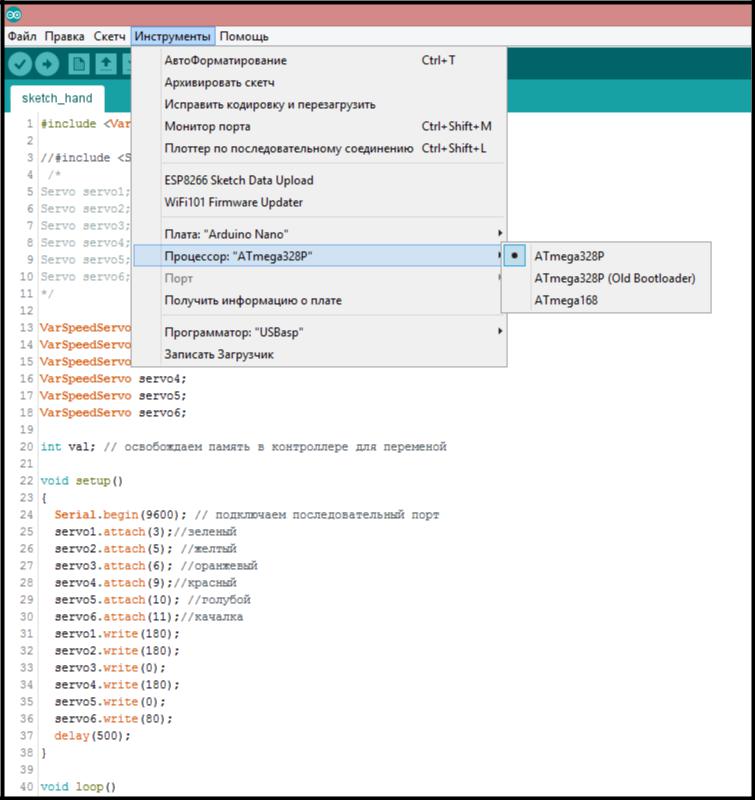 Рисунок 42 — Arduino Software 49 2.6.10 Программирование и наладка Программирование микроконтроллера Arduino Nano было произведено помощью компьютера (Рисунок 43). При подключении манипулятора по USB проводу и установленной среды разработки Arduino IDE. Для этого бы-ла разработана программа управления микроконтроллером, для получения команд от Andro IDE устройства через Bluetooth модуль и отправки команд сервомоторам. Отладка также производилась по USB проводу. 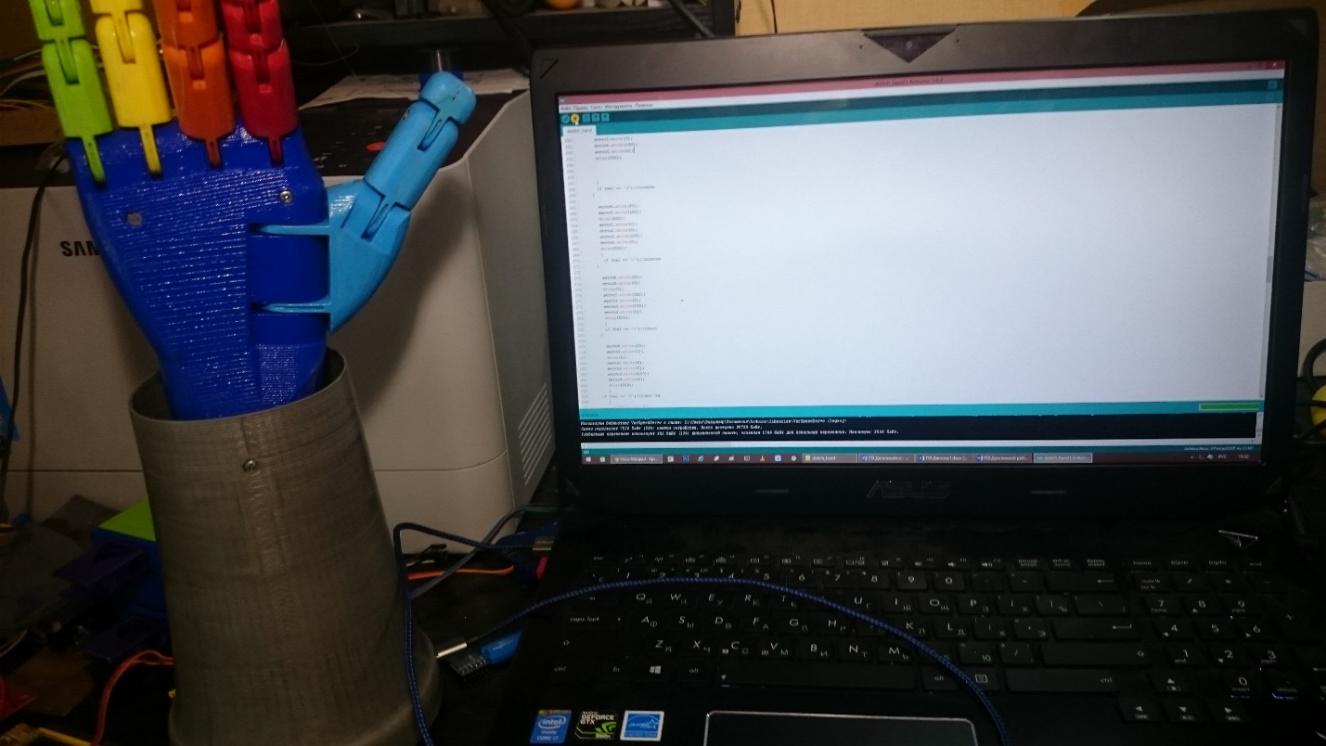 Рисунок 43 — Программирование руки манипулятора Наладка заключалась в правильности подключения серводвигателей или программного присвоения пинов к сервам (нужным пальцем). Также надо было программно определить рабочие диапазоны углов вращения для каждого сервомотора. Для правильной работы пальцев и всех движений ма-нипулятора. Для этого был использован терминал, встроенный в программу Arduino IDE (рисунок 44). Программно задавались углы работы сервомото-ров и смотрелись максимальные и минимальные значения. Которые потом были прописаны в скетче. 50 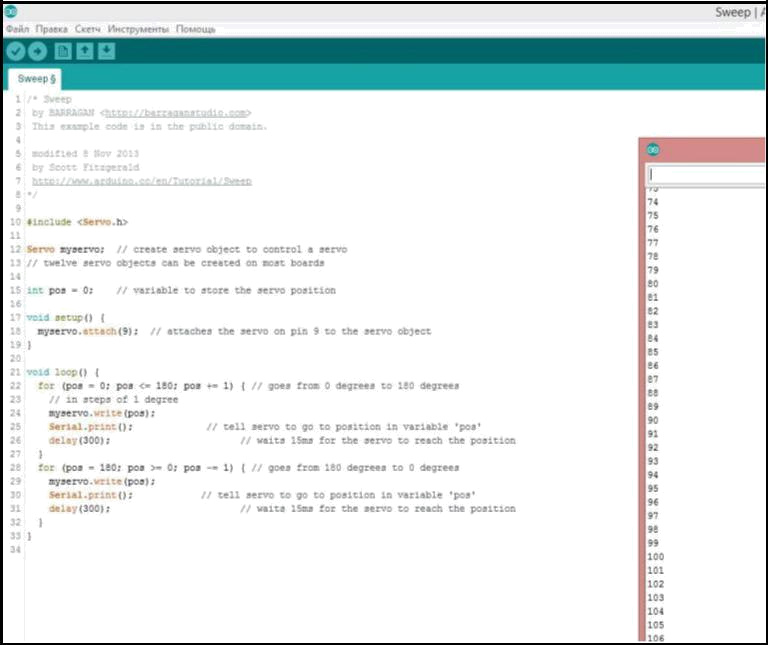 Рисунок 44 — Serial Monitor настройка углов сервомоторов 2.7 Калькуляция проекта В рамках проекта было создано: 28 3D моделей элементов манипулятора в программе SOLIDWORKS в форматах SLDPRT и SLDASM; напечатано на 3D принтере 27 деталей манипулятора при помощи программного обеспечения Repetier Host, общее время печати составило 36 часов; создана управляющая программа микроконтроллера в среде Arduino IDE из 492 строк кода; создано мобильное Android-приложение в визуальной среде MIT App inventor2. 51 |