дипломная работа вариант второй. 1 Обзор технологий, средств и платформ создание роботов манипуляторов
 Скачать 7.1 Mb. Скачать 7.1 Mb.
|

|
СОДЕРЖАНИЕ
3 2.6.9 Создание управляющей программы для микроконтроллера Arduino Nano v 3.0 49 2.6.10 Программирование и наладка 50 2.7 Калькуляция проекта 51 Заключение 52 Список использованных источников 54 Приложение 58 4 ВВЕДЕНИЕ На протяжении многих веков люди создают механизмы и машины, умеющие упростить нашу жизнь, и современный человек едва ли сможет по-казать собственную жизнь без них. Каждый день появляются новые устрой-ства и улучшаются имеющиеся. Подобных устройств уже огромное число, однако, бесспорно, наиболее значительным достижением человеческой идеи считаются роботы. Робот (чеш. robot, от robota — подневольный труд, rob — раб), машина антропоморфным (человекоподобным) действием, осуществляет функции человека (иногда животного) при взаимодействии с окружающим миром. формированием робототехники определились 3 типа роботов: с жёсткой программой действий; манипуляторы, управляемые человеком — оператором; с искусственным разумом (в некоторых случаях именуемые ин-тегральными), функционирующие целенаправленно («разумно») без вмеша-тельства человека. Большая часть нынешних роботов (абсолютно всех трёх видов) — роботы манипуляторы. Промышленный Робот манипулятор содержит «механическую руку» (одну или несколько) и вынесенный пульт управления либо встроенное устройство программного управления, реже электронно-вычислительная ма-шина (ЭВМ). Манипулятор — комплекс пространственного рычажного механизма и концепции приводов, исполняющая под управлением программируемого ав-томатического устройства либо человека — оператора воздействия (манипу-ляции), подобные операциям руки человека. Промышленные роботы преду-смотрены с целью замены человека. При этом решается важная обществен-ная цель — избавление человека от работ, сопряженных с опасностями для 5 здоровья или с тяжелым физическим трудом, а кроме того от простых моно-тонных действий, никак не спрашивающих значительной квалификации. Эластичные автоматизированные производства, формируемые на базе про-мышленных роботов, дают возможность решать задачи автоматизации на предприятиях с обширной номенклатурой продукции при мелкосерийном и штучном производстве. Компьютерное моделирование робототехнических концепций обладает колоссальной ролью в сферах науки и техники. Большое число трудоёмкой физической работы человека на сегодняшний день заме-нено роботами, а компьютерные приборы, системы компьютерной математи-ки существенно облегчили массивные расчеты и преображения, сведя их к минимуму. Компьютерные модели применяются с целью извлечения новых познаний о моделируемом объекте или для приближенной оценки поведения математических систем, очень сложных для аналитического исследования. Компьютерное моделирование считается одним из из-за, финансовых или физических препятствий, или могут предоставить непредвиденный итог. Актуальность выбора основания и использования интерактивного ма-нипулятора определена последующим: использование информационно-коммуникативных технологий в учебной деятельности; увеличение эффек-тивности и результативности учебного процесса, потребностью развития но-вейшего вида учащегося — грамотного пользователя информационных обра-зовательных услуг. Цель выпускной квалификационной работы — создать интерактивный манипулятор «Рука» с голосовым управлением. 6 Исходя из поставленной цели, определены задачи выпускной квалифи-кационной работы: Провести аналитический обзор, существующих разработок роботов манипуляторов. Повести обзор технологий, платформ и средств создания роботов манипуляторов для определения подходящих для реализации робототехнического манипулятора «Рука». Описать характеристики робототехнического манипулятора «Рука» и обосновать выбор оборудования для его реализации. Создать 3D модель, элементы и действующий прототип робототехнического манипулятора «Рука». Разработать программное обеспечение для дистанционного управления робототехническим манипулятором «Рука». 7 1 ОБЗОР ТЕХНОЛОГИЙ, СРЕДСТВ И ПЛАТФОРМ СОЗДАНИЕ РОБОТОВ МАНИПУЛЯТОРОВ 1.1 Основные понятия и определения зависимости от системы управления манипуляторы разделяются на биотехнические (с ручным управлением), интерактивные (со смешанным управлением) и автоматические. Манипуляционный робот (МР) предполагает собой перепрограммиру-емый многофункциональный манипулятор, рассчитанный с целью осуществ-ления конкретных, предварительно заданных перемещений материалов, де-талей, инструментов или специальных приспособлений с целью выполнения различных работ. Значимым компонентом МР считается сам манипулятор — прибор с целью исполнения двигательных функций, подобных функциям ру-ки человека при перемещении объектов в пространстве, оснащённое рабочим органом. Согласно собственной структуре манипулятор — многозвенная машина, между отдельными элементами которой существуют механические взаимосвязи. Большая часть имеющихся на сегодняшний день МР применя-ют электрические двигатели с целью исполнения перемещений. С целью управления рабочим органом могут использоваться пневматические и гид-равлические приводы. зависимости от области использования могут использоваться различ-ные схемы построения механической части манипулятора. Следует разделять структуру его «руки» и «запястья». Роботехнический манипулятор представляет собой автоматическую машину для воспроизведения двигательных и интеллектуальных функций человека. Основная конструкция «руки» представляет собой последовательность звеньев, соединённых между собой вращательными и поступательными свя-зями. По характеру и количеству связей можно выделить следующие катего-рии организации пространственных перемещений: • роботы с декартовой системой координат; 9 роботы с цилиндрической системой координат; роботы со сферической системой координат; роботы с вращательной системой координат. Интерактивные манипуляционные роботы отличаются активным уча-стием человека в процессе управления, которое выражается в различных формах взаимодействия его с ЭВМ. Здесь также различают три разновидно-сти управления: автоматизированное, супервизорное и диалоговое. При ав-томатизированном управлении простые операции робот осуществляет без управляющего воздействия со стороны оператора, а остальные при участии оператора в биотехническом режиме. Супервизорное управление различается тем, что весь оборот действий разбивается на части, выполняемые манипуля-ционным роботом автоматически, однако переход от одной части к другой исполняется оператором путем подачи определенных команд. При диалого-вом управлении оператору и ЭВМ является вероятность совместно осу-ществлять решения и руководить манипулятором в сложных ситуациях. Манипуляторы реализовывают непосредственный ввод информации, указывая курсором на экране монитора команду или место ввода данных. Манипуляторы, как правило, подключаются к последовательному порту. Применяются с целью облегчения управления компьютером (ПК). К манипу-ляторам относятся мышь, графический планшет (дигитайзер), световое перо, Tachpad сенсорный экран, Roller Mouse, pointing stick, джойстик и игровые манипуляторы. Манипуляционные роботы — основные рабочие органы многочислен-ных современных и перспективных промышленных и специальных робото-технических комплексов. MP различаются существенным многообразием. Для них характерно постоянное расширение области применения и спектра выполняемых операций, постоянное усложнение решаемых задач. Примером могут служить MP для работы на создаваемой в настоящее время Междуна-родной Космической Станции (МКС) (манипуляторы SSRMS, JEMRMS, ERA). Последний из них (ERA) предназначен для работы на Российском 10 Сегменте (PC) МКС. Космические роботы призваны решать самые разнооб-разные задачи сборки и обслуживания МКС, транспортировки полезных гру-зов и космонавтов, проведения ремонтных работ и экспериментов на поверх-ности МКС и т.д. Многочисленные примеры MP разных типов и для разных условий применения можно привести и по наземным MP, MP для экстре-мальных сред и т.д. Манипуляционные роботы содержат многозвенные пространственные исполнительные механизмы (ИМ) со многими степенями подвижности, си-стемы следящих приводов, системы управления приводами и представляют собой сложные многомерные динамические системы. Эффективность MP в существенной степени зависит от качества управ-ления ими. Обеспечить высококачественное управление возможно только лишь при адекватном учете динамических свойств MP как на этапах проек-тирования, так и при эксплуатации MP. 1.2 Обзор моделей роботов-манипуляторов настоящее время существует много различных разработок манипуля-тор подражающих человеческой руке. Они нашли широкое применение в жизни для протезирования, управление различными агрегатами и перемеще-ния объектов. Не перестают удивлять исследования в области новых протезов, под-ключенных к нейронным сетям человека и управляемых с помощью сигналов мозга. В недалеком будущем возможно, что очень скоро механические руки ноги с нейроинтерфейсом, упростят жизнь многим людям, с отсутствую-щими конечностями (рисунок 1). 11 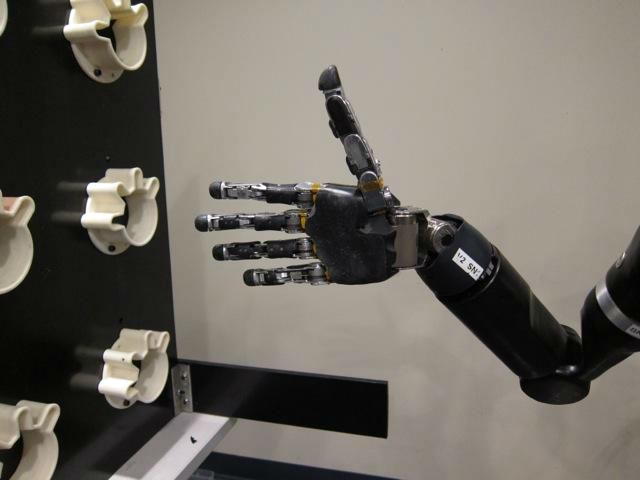 Рисунок 1 — Новый манипулятор с нейроинтерфейсом обладает десятью степенями свободы (фото Journal of Neural Engineering) Пример движений и возможности манипулятора с нейроинтерфейсов приведён ниже на (рисунок 2). 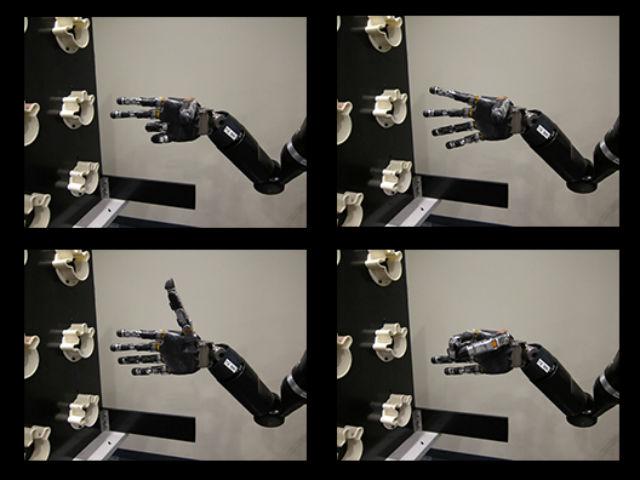 Рисунок 2 — Демонстрация возможностей манипулятор с нейроинтерфейсом (фото Journal of Neural Engineering) 12 Человек всегда хотел создать механическую замену себе. Для этого сейчас разрабатываются и придумываются различные экзо скелеты, роботы, манипуляторы. В различных областях человеческой жизни широко исполь-зуются манипуляционные роботы (МР). Их применение позволяет повысить производительность технологических процессов, устранить присутствие лю-дей на опасных участках, проводить операции в агрессивных средах. Мани-пуляционный робот представляет собой перепрограммируемый многофунк-циональный манипулятор, предназначенный для осуществления определен-ных, заранее заданных перемещений материалов, деталей, инструментов или специальных приспособлений с целью выполнения различных работ. Важ-ным компонентом МР является сам манипулятор — устройство для выпол-нения двигательных функций, аналогичных функциям руки человека при пе-ремещении объектов в пространстве, оснащённое рабочим органом. По своей структуре манипулятор — многозвенная машина, между отдельными эле-ментами которой существуют механические связи. Большинство существу-ющих в настоящее время МР используют электрические двигатели для вы-полнения перемещений. Для управления рабочим органом могут использо-ваться пневматические и гидравлические приводы. В зависимости от области применения могут использоваться различные схемы построения механиче-ской части манипулятора. Следует разделять структуру его «руки» и «запя-стья». Основная конструкция «руки» представляет собой последовательность звеньев, соединённых между собой вращательными и поступательными свя-зями. По характеру и количеству связей можно выделить следующие катего-рии организации пространственных перемещений: роботы с декартовой си-стемой координат, роботы с цилиндрической системой координат, роботы со сферической системой координат, роботы с вращательной системой коорди-нат. Также существует много более простых модели манипуляторов, в виде руки которым можно отнести к игрушкам или комплектующим для создания роботов (рисунок 3). 13  Рисунок 3 — Металлическая рука манипулятор Работы по созданию руки манипулятора, которые представлены в ин-тернете. Много существует моделей для 3D печати с механическим управле-нием, а также есть модели с управлением при помощи электроники. Пример телеуправляемый манипулятор, повторяющий жесты руки человека (рису-нок 4). 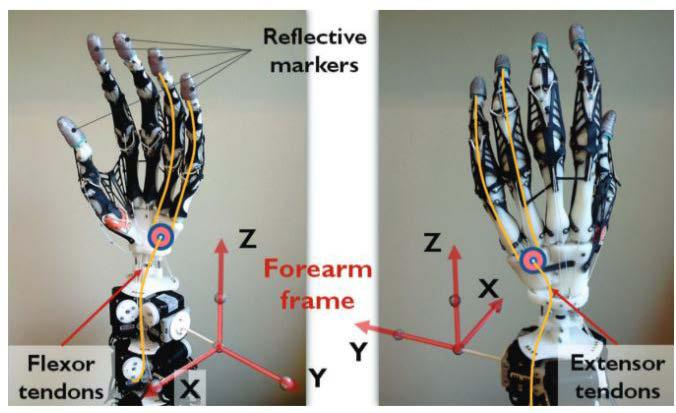 Рисунок 4 — Телеуправляемый манипулятор Недостатками всех этих манипуляторов является их сложность произ-водства и большая стоимость. 14 Достоинством же является большая степень возможных движений (ма-нипуляций) и применений в разных проектах. | |||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||