|
|
1. Порядок проектирования маг тдов
7. Машины циклического действия для разработки траншей и котлов Определение усилий копания. Определение производительности
Землеройные машины циклического действия – это одноковшовые экскаваторы, которые производят разработку грунта с погрузкой его в транспортные средства или навымет (выгрузку в отвал).
Одноковшовые строительные экскаваторы являются наиболее распространенным видом землеройных машин. Они служат для разработки грунта и перемещения его в отвал или для погрузки в транспортные средства. Разрабатывают они грунты I-IV групп и разрыхленные мерзлые или скальные грунты. Кроме того, экскаваторы применяют на сваебойных, погрузочно-разгрузочных, монтажных и других работах, используя различные виды сменного рабочего оборудования. По назначению одноковшовые экскаваторы подразделяют на универсальные и специальные.
Одноковшовые универсальные экскаваторы бывают одномоторные с приводом (механическим и гидромеханическим) и многомоторные с приводом (индивидуальные, групповые и индивидуально-групповые) с электрическим или гидравлическим приводами.
Передачи экскаваторов бывают механические (шестеренные, цепные, клиноременные, канатные), электрические (на переменном токе, на постоянном токе), гидравлические(объемные ,гидродинамические).смешанные(гидромеханические, электромеханические)
ПРОИЗВОДИТЕЛЬНОСТЬ И РЕЖИМЫ РАБОТЫ ОДНОКОВШОВЫХ ЭКСКАВАТОРОВ.
Различают производительность теоретическую (конструктивную), техническую и эксплуатационную.
Теоретическая производительность, м3/ч, определяется по формуле
п = q · n
где q - геометрическая вместимость ковша; n - конструктивно возможное (расчеrnое) число рабочих циклов в час.
Техническая производительность, м3/ч, определяется по формуле
П =q·n ·Кг
где n - наибольшее возможное число циклов в минуту при данных условиях работы; Кг - коэффициент влияния фунта,
Кг= Kн ·Kp где Кн - коэффициент наполнения; Кр - коэффициент разрыхления.
Эксплуатационная производительность в отличие от технической учитывается при использовании экскаватора в зависимости от времени и квалификации машиниста:
П=Пт·Кв·Км
где Кв - коэффициент, зависящий от использование экскаватора по времени; Км - коэффициент, зависящий от квалификации машиниста.
Базовая машина одноковшового экскаватора обеспечивает функционирование различного рабочего оборудования. Рабочее оборудование для копания грунта называют основным, а рабочее оборудование для выполнения других операций — дополнительным.
Основное рабочее оборудование
Прямая лопата — основное рабочее оборудование для разработки (копания) грунта выше уровня стоянки экскаватора. Обратная лопата — основное рабочее оборудование для разработки (копания) грунта ниже уровня стоянки экскаватора. Применяется при копании котлованов, траншей, при планировании откосов и отсыпке насыпей. Может применяться для погрузочных работ.
Струг. Представляет собой стрелу, по которой канатом перемещается тележка с закреплённым на ней ковшом. Драглайн — рабочее оборудование с ковшом, гибко подвешенным на канатах. Применяется для разработки грунта ниже уровня стоянки экскаватора. Грунт копают в направлении к экскаватору.
Грейфер используется для разработки узких глубоких котлованов (колодцев), выполнения погрузочно-разгрузочных работ..
Дополнительное рабочее оборудование
Рыхлитель. Сменное рабочее оборудование, предназначенное для рыхления твёрдого (мёрзлого) грунта, разрушения строительных конструкций, асфальто-бетонного покрытия.
Экскаватор с гидравлической дробилкой. Одноковшовые экскаваторы могут использоваться для корчевания пней.
Подъёмный кран. В связи с тем, что базовая машина экскаватора и подъёмного крана имеют сходную конструкцию, ряд моделей экскаваторов может комплектоваться крановым оборудованием. Манипулятор. Экскаватор с манипулятором осуществляет демонтажные работы с помощью ножниц для резки железобетона.
8. Машины непрерывного действия для разработки траншей и котлованов. Их принципиальное устройство и сравнительные технико-эксплуатационные показатели
Цепные траншейные экс.(продольного капания)(ЭТЦ,ЭТУ,ЭТН)
Роторные трнш.экск. (ЭТР,ЭР)
Шнекороторные экск(ЭТР)
Двухроторные(двухфрезерные)экс(каналокопатели)(ЭТР. КФН)
Плужно-роторные каналокопатели (МК)
Цепные карьерные экскаваторы поперечного капания (ЭМ)
Мелиоративные экс.каналоочистители (ЭМ,МР)
Роторные карьрные стреловые экскаваторы радиального капания
Землеройные машины непрерывного действия – это цепные и роторные экскаваторы, которые применяются для разработки грунта линейных выемок (траншей, канав) большой протяженности.
Одноковшовые строительные экскаваторы являются наиболее распространенным видом землеройных машин. Они служат для разработки грунта и перемещения его в отвал или для погрузки в транспортные средства. Разрабатывают они грунты I-IV групп и разрыхленные мерзлые или скальные грунты. Кроме того, экскаваторы применяют на сваебойных, погрузочно-разгрузочных, монтажных и других работах, используя различные виды сменного рабочего оборудования. По назначению одноковшовые экскаваторы подразделяют на универсальные и специальные.
Наряду с этим роторные экскаваторы имеют большие габариты и Macc Габариты и масса ротора значительно растут с увеличением глубины отрываемой траншеи.
Для обеспечения непрерывной работы машины рабочий орган должен постоянно вращаться. Характер этого вращения в сочетании с типом рабочего органа является основным признаком, по которому классифицируют эти экскаваторы (табл. 5.1). У экскаваторов продольного копания плоскости перемещения рабочего органа и движения ковшей или скребков совпадают: поперечного копания - плоскость движения ковшей перпендикулярна плоскости движения рабочего органа; радиального копания - ковши движутся в вертикальной плоскости. а сам рабочий орган совершает поворотные движения относительно вертикальной оси.
Экскаваторы продольного копания, цепные и роторные, имеют основное исполнение траншейное - и разновидности с дополнительным оборудованием для укладки дрен и прокладки каналов. Двухроторные, плужно-роторные и шнекороторные экскаваторы предназначены для рытья каналов.
Экскаваторы поперечного копания имеют два основных исполнения - карьерное и мелиоративное.
Экскаваторы радиального копания, или, как их часто называют, роторные стреловые, предназначены для карьерных работ:
Многоковшовые экскаваторы классифицируют также по типу при вода - с механическим, гидравлическим, электрическим и комбинированным (наибольшее распространение получили экскаваторы с комбинированным приводом); типу ходового устройства - на гусеничном и пневмоколесном ходу (в основном распространены экскаваторы на гусеничном ходу, отличающиеся лучшей проходимостью); способу соединения рабочего оборудования с тягачом - навесные (рабочий орган без задней дополнительной опоры), полуприцепные (рабочий орган опирается спереди на тягач,- а сзади - на дополнительную тележку) и прицепные.
ПРОИЗВОДИТЕЛЬНОСТЬ МНОГОКОВШОВЫХ ЭКСКАВАТОРОВ
Различают теоретическую, техническую и эксплуатационную производительность экскаваторов непрерывного действия.
Теоретической считается производительность экскаватора в условиях непрерывной работы при максимально возможной скорости рабочего органа и 1OO% наполнении экскавационных емкостей за 1 ч работы.
Теоретическая производительность мноroковшового экскаватора с цепным и роторным рабочим органом, М3/Ч, определяется по формуле
Птр=3,6 * Vц qк/Tк=0,06 qк*z1
rде Vц - скорость движения ковшовой цепи, м/с; q - вместимость ковша, л; Тк( - шаг ковшей (расстояние между ковшами), м; z - число разгрузок ковша в мину
Теоретическая производительность экскаваторов с бесковшовым (скребковым) рабочим opгaном, м3/ч, определяется по формуле
Птр=3600* bc* hc* Vц”
где bc - ширина скребка, м; hc - высота скребка, v.
Техническая производительность - это производительность за 1 ч чистой работы, под которой понимают работу экскаватора без простоев.
Техническая производительность, м3/ч,
Пт= Птр* Кн/ Кр
где Кн - коэффициент наполнения экскавационных емкостей, зависящий от характера гpунтa, толщины срезаемой стружки, длины и формы забоя; Кр - коэффициент разрыхления грунта в процессе разработки
Процесс экскавации у скребковых экскаваторов отличается от ковшовых. Скорость груновoгo потока между скребками несколько ниже скорости цепи, а объемная масса потока меньше объемной массы грунта в ковшах. Эти особенности работы скребковых экскаваторов учитываются коэффициентом наполнения.
Эксплуатационной является производительность экскаватора с учетом простоев, перерывов и задержек. Она определяется по формуле
Пэ= Пт* Кн
где Кн - коэффициент использования рабочего времени, равный 0,4-0,6.
Многоковшо́вый экскава́тор — землеройная машина непрерывного действия для копания и перемещения грунта. Рабочим органом являются непрерывно движущиеся ковши, закреплённые на бесконечной цепи, ленте или роторе.
Цепные экскаваторы
Ковши закреплены на бесконечной цепи. Отвал грунта производится непосредственно из ковшей. Форма направляющей цепи обычно задаёт профиль копания.
Роторный экскаватор — самоходная выемочно-погрузочная машина непрерывного действия на гусеничном или шагающе-рельсовом ходовом оборудовании с выдвижной или невыдвижной стрелой, выбирающая горную породу ковшами, укреплёнными на роторном колесе.
9. Роторный траншейный экскаватор. Принцип работы.
Экскаваторы траншейные роторные (ЭТР) предназначены для разработки траншей прямоугольного или трапецеидального профиля в однородных талых грунтах I—IV категорий, не содержащих крупные каменистые включения, а также в мерзлых грунтах при глубине промерзания верхнего слоя до 1,1—1,5 м.
Роторный траншейный экскаватор состоит из гусеничного тягача, обеспечивающего поступательное движение (подачу) машины, и навесного или полуприцепного рабочего органа для рытья траншей и отброса грунта, шарнирно соединенных между собой в вертикальной плоскости. Гусеничные тягачи ЭТР выполняют на базе переоборудованных серийных гусеничных тракторов, у которых уширен и удлинен гусеничный ход, в трансмиссию включен ходоуменьшитель для получения рабочих скоростей передвижения машины, имеются дополнительная рама для монтажа рабочего оборудования и механизмы для подъема и привода рабочего органа. Рабочий орган ЭТР представляет собой жесткий ковшовый ротор (с числом ковшей 10—16), внутри которого помещен поперечный ленточный конвейер. При поступательном движении гусеничного тягача укрепленные на вращающемся роторе ковши с зубьями непрерывно разрабатывают траншею, поднимают разрыхленный грунт на поверхность и высыпают его на ленту поперечного отвального конвейера, отбрасывающего грунт в сторону параллельно траншее в отвал. Глубина отрываемой траншеи регулируется гидравлическим механизмом подъема-опускания рабочего органа. Для рытья траншей с различными параметрами на один и тот же базовый тягач могут навешиваться сменные рабочие органы с различными шириной, диаметром и числом ковшей ротора.
Усилие копания грунта складывается из окружного (касательного) усилия на роторе, создаваемого его приводом, и усилия продольной подачи ротора, создаваемого при движении тягача. Скорость движения тягача и частота вращения ротора определяют толщину срезаемой ковшами стружки и степень их наполнения. Размеры траншеи определяются шириной ковшей и степенью заглубления в грунт ротора, подвешенного на тягах подъемного механизма.
10.Конструкция режущего инструмента. Назначение, принцип действия
Конструкция режущего инструмента и его расположение на ковшах экскаваторов в значительной степени определяют их производительность, надежность и долговечность.
Первым моделям отечественных экскаваторов была присуща расстановка рабочего инструмента по схеме /, называемой шахматной расстановкой. При этом в забое одновременно находится большое число зубьев, в результате чего доля общего окружного усилия на роторе, приходящегося на зуб, незначительна и не позволяет ему разрабатывать плотные грунты. При разработке траншеи таким ротором каждый зуб срезает тонкую стружку, и при ее отделении преобладают деформации лобового сжатия и смятия грунта со значительными потерями мощности на трение контактирующей поверхности зубьев с забоем, поэтому такой способ разработки грунта является наиболее энергоемким.
Схеме 2, называется ступенчато-шахматной расстановкой. Согласно этой схеме, ковши на роторе разделяются на.две или три группы (в зависимости от диаметра ротора), причем в пределах каждой из них зубья на ковшах устанавливаются в определенном порядке, одинаковом с другой группой. При этом вся ширина забоя траншеи распределяется между зубьями каждой группы таким образом, что каждый зуб разрабатывает определенный, предназначенный только ему участок ширины забоя. В настоящее время рабочими органами такого типа оснащены все отечественные роторные траншейные экскаваторы, разрабатывающие грунты I—IV категорий. Однако разработка более прочных грунтов (например, мерзлых) ротором с расстановкой зубьев по схеме 2 все же затруднительна. Для этой цели приме-
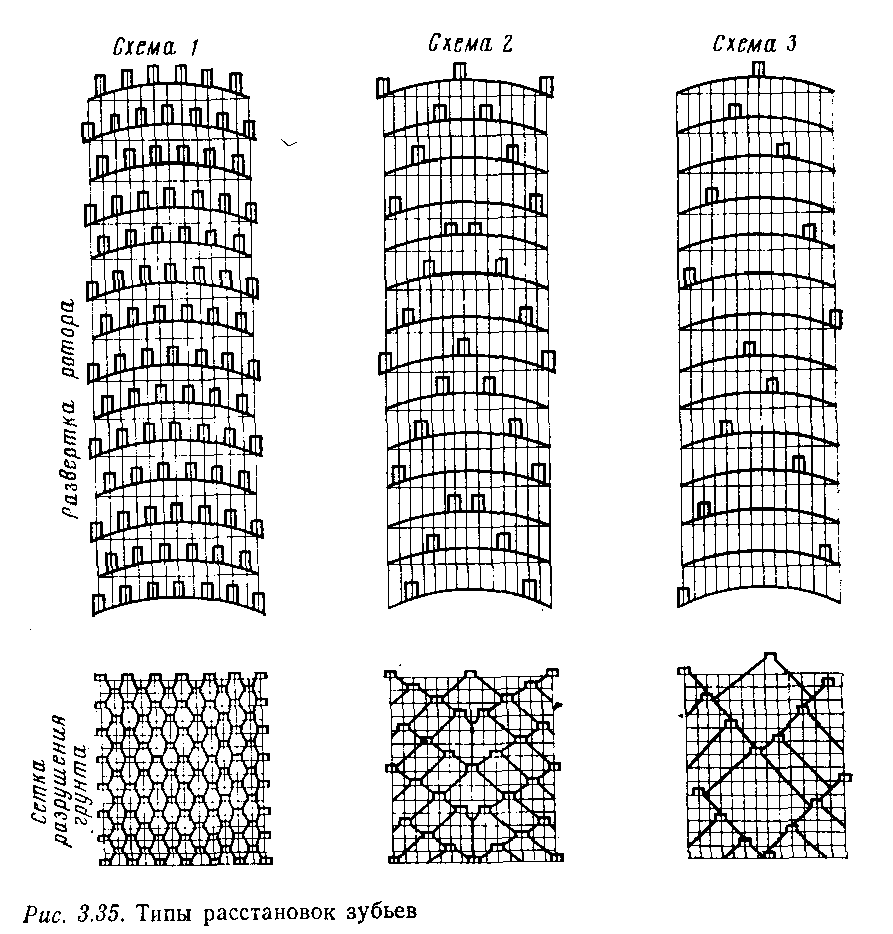 
няется сменный ротор, предназначенный для разрушения прочных и мерзлых грунтов методом «крупного скола», иллюстрируемый схемой 3. По этой схеме расстановка зубьев на ковшах ротора осуществляется в ступенчато-шахматном порядке с той лишь разницей, что ковши на роторе составляют только одну группу и в каждой линии реза (ряду) работает только один зуб, срезающий стружку большого сечения.
Доведение общего числа зубьев на роторе и в забое до минимально возможного обусловливает снижение потерь на трение и снятие грунта, повышает долю общего усилия, приходящегося на зуб, и обеспечивает таким образом эффективную работу экскаваторов в тяжелых грунтовых условиях при полной глубине промерзания в траншее.
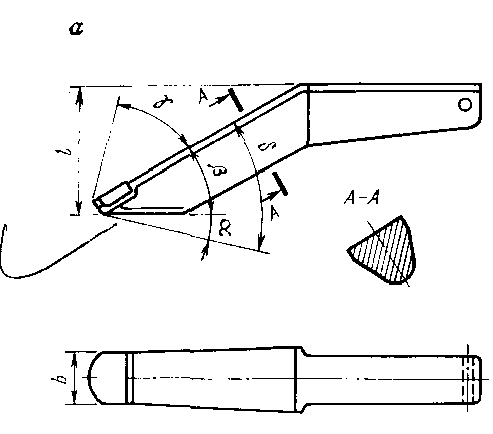
Применявшийся прежде зуб представлял собой изогнутую пластину из пружинной стали марки 60С2, расширенную в рабочей части и крепящуюся к ковшу двумя болтами. При этом замена изношенного зуба была затруднительна ввиду деформации и коррозии болтового соединения. Для предотвращения выпадения зуба при транспортном ходе экскаватора в отверстия на ковше его хвостовой части вставляется шплинт.
Эффективность работы роторного траншейного экскаватора зависит от геометрии режущего инструмента. Геометрия зуба-резца определяется углами, образованными его профильными плоскостями с линией реза, а также его шириной и вылетом. Линия реза является касательной к траектории движения инструмента. Угол резания для зубьев роторного траншейного экскаватора выбирается в пределах 6 = 40-5-45°, а задний угол а=8ч-15°. Прочность зуба определяется углом заострения р, шириной режущей кромки bи вылетом зуба. Увеличение вылета приводит к нарастанию изгибающего момента на зубе, а уменьшение — к возможности разработки грунта кромкой ковша. Распределение напряжений на режущей кромке зубьев определяет характер износа их в плане.
11.Машины для разработки траншей на заболоченных и обводненных
участках трассы
Для рытья траншей на заболоченных и обводненных участках трассы применяются машины, специально оборудованные для работы в этих условиях. Их можно разделить на две основные группы. К первой группе относятся машины, располагающиеся при работе вне заболоченного участка (или внутри его, но поставленные на специальный настил из бревен, понтон и т. д.) и оснащенные рабочим органом, вынесенным в зону этого участка. Эту группу представляют канатно-скреперные установки различной конструкции. Ко второй группе относятся машины, оказывающие на грунт малое удельное давление и вследствие этого свободно перемещающиеся в процессе работы по заболоченному участку. Эту группу представляют экскаваторы с сильно развитой опорной поверхностью (типа ЭПГ-1 и ЭКБ-1).
КАНАТНО-СКРЕПЕРНЫЕ УСТАНОВКИ
Примером канатно-скреперной установки служит установка КСУ-1.
Самоходная канатно-скреперная установка КСУ-1 (рис. 83) предназначена для рытья траншей на болотах, строительстве переходов через небольшие реки и водоемы, а также в горной местности на уклонах более 20°.
Установка состоит из тягача (трактор Т-100), двухбарабанной лебедки (Л51), смонтированной на заднем мосту и прицепном устройстве трактора, комплекта скреперных ковшей и якорного приспособления с блоком. В качестве такого приспособления могут применяться крюковой анкер, прилагаемый к установке, закопанные в грунт или уложенные поперек траншеи бревна, или трубы, а также трактор. Для пневматического управления включением барабанов и тормозов лебедки на дизеле трактора установлен компрессор автомобиля ЗИЛ-164 с приводом от шкива тракторного вентилятора. При работе трактор с лебедкой располагается по одну сторону заболоченной зоны (или водоема), а якорь устраивают на другой ее стороне (рис. 84). На якоре имеется обойма с неподвижным блоком, через который пропускают канат. Канатов два. Каждый из них крепится одним концом к своему барабану лебедки, а вторым - к ковшу. Канат, прикрепленный к передней части ковша, называется тяговым, ак задней — холостым. Как правило, тяговый канат непосредственно соединен с барабаном лебедки и подтягивает ковш к трактору, а холостой сначала перекинут через неподвижный блок якоря, а потом идет на барабан и подтягивает ковш к якорю. Попеременно включая барабаны лебедки на наматывание и сматывание каната, перемещают ковш к трактору — рабочий ход (скреперование) или к якорю — холостой ход.
Ковши, которыми снабжается установка, — волокушного типа. Они отличаются от ковшей других типов тем, что не имеют дна. Это необходимо для разгрузки ковша в начале холостого хода без его подъема и опрокидывания.
Нижняя режущая кромка ковша снабжена зубьями, которые предназначены для разрушения (резания) грунта. В задней части ковша сверху имеется стойка с роликами, между которыми проходит холостой канат. Ролики предохраняют канат от трения о ковш, снижая тем самым его износ и уменьшая возникающее при этом дополнительное сопротивление перемещению ковша. Внизу задней части ковша иногда делают откидной зуб, служащий для рыхления грунта во время холостого хода.
В процессе рабочего хода ковш врезается зубьями в грунт, разрушает его, перемещаясь вперед, наполняется разрушенным грунтом и транспортирует его к трактору (подобно отвалу бульдозера). На некотором расстоянии от трактора ковш останавливается и начинает перемещаться назад — холостой ход. При этом он опорожняется от грунта, который остается перед трактором. По мере накопления грунт периодически сдвигается в сторону бульдозером. В результате таких перемещений ковша вдоль траектории его движения постепенно образуется траншея (см. рис. 84, а).
Для того чтобы при работе канатно-скреперных установок использовать холостой ход ковшей в качестве рабочего, иногда применяют два ковша, скрепленные друг с другом своей задней частью. Тогда оба ковша работают попеременно: когда у одного из них рабочий ход — у другого холостой, и наоборот (см. рис. 84, б). Канатно-скреперные установки просты, дешевы, удобны в транспортировке, но обладают малой производительностью и неспособны разрабатывать плотные и мерзлые грунты. Ввиду этого они получили ограниченное применение.
ЭКСКАВАТОРЫ С СИЛЬНО РАЗВИТОЙ ОПОРНОЙ ПОВЕРХНОСТЬЮ
Разработка траншей на заболоченной местности часто производится при помощи одноковшовых экскаваторов, под гусеницы которых подкладывают бревенчатые щиты, последовательно перекладываемые в*процессе копания. Щиты являются, таким образом, дополнением к ходовой части землеройных машин, увеличивая их опорную поверхность и снижая тем самым удельное давление на грунт. Однако применение щитов сильно усложняет производство работ и снижает производительность экскаваторов. Для увеличения производительности и маневренности землеройных машин, работающих на грунтах с низкой несущей способностью, необходимо значительно увеличить опорную поверхность их собственной ходовой части, отказавшись от применения дополнительных громоздких приспособлений в виде щитов. Выполнение этой задачи осложнено тем, что экскаваторы должны перемещаться не только по ровной, но и пересеченной местности как с мягким, так и с твердым поверхностным слоем.
Первым опытом в этой области было создание экскаватора на понтонно-гусеничном ходу модели ЭПГ-1 (рис. 85, а). При этом поворотная часть и рабочее оборудование было целиком заимствовано у серийно выпускающегося экскаватора Э-302, а его пневмо-колвсрый ход заменен специально спроектированным понтонно-гусеничным, состоящим из ходовой рамы и двух гусеничных тележек. Каждая гусеничная тележка имела пять полых катков понтонов, придававших экскаватору плавучесть.
Катки-понтоны охватывались специальной широкой и легкой гусеницей (ширина 1,5 м), обеспечивающей экскаватору малое удельное давление на грунт (0,1 кгс/см2при весе экскаватора 19 т). Гусеница выполнена из четырех рядов пластинчатых втулочно-роликовых цепей, на которые опирались бандажи катков. К цепям приклепаны башмаки — дюралюминиевые, скрепляюшие швеллеры.
Гусеница приводилась в действие четырьмя звездочками (до числу втулочно-роликовых цепей), сидящими на одном валу, получающем вращение от ходового механизма при помощи цепной передачи. G противоположной звездочкам стороны на раме каждой тележки был укреплен натяжной механизм гусеничной цепи. При движении по воде нижние ветви гусениц выполняли роль гребных лопаток, благодаря чему экскаватор перемещался вплавь со скоростью до 2,2 км/ч. Скорость передвижения машины по суше составляла 0,7—3,1 км/ч.
Вследствие сильно развитой опорной поверхности и при наличии полых катков-понтонов экскаватор ЭПГ-1 был способен передвигаться по любым болотам и даже открытым водоемам, обладал хорошей устойчивостью и мог работать в сильно заболоченной местности и даже на плаву (в расчаленном состоянии), т. е. в условиях, в которых любой другой экскаватор (даже с применением щитов) неработоспособен.
Однако недостаточная прочность гусениц и катков-понтонов в сочетании с жесткой подвеской, широкой и длинной ходовой частью не позволяла перегонять экскаватор своим ходом по твердому грунту и пересеченной местности, требовала разборку экскаватора при транспортировке его другими средствами, не обеспечивала отрытие широких траншей и разработку перемычек.
В силу этих обстоятельств экскаватор ЭПГ-1 не получил широкого распространения на строительстве магистральных трубопроводов. Нужен был другой, имеющий все преимущества экскаватора ЭПГ-1, но лишенный большинства его недостатков.
С этой целью СКВ «Газстроймашина» был разработан проект нового экскаватора ЭКБ-1 (рис. 85, б).
Экскаватор-кран болотный ЭКБ-1 является одноковшовым полноповоротным экскаватором, предназначенным, как и ЭПГ-1, для земляных и погрузочных работ на сильно заболоченных участках трассы.
Снабженный различными видами сменного оборудования экскаватор может выполнять следующие виды работ:
1) драглайном — отрытие траншей и котлованов на болотах, заболоченных поймах рек, а также реках и водоемах глубиной не более 0,9 м;
2) грейфером — разработка траншей и котлованов в болотах, реках и водоемах с высотой уровня воды более 0,9 м. Экскаватор при этом находится на плаву, удерживаясь от произвольного перемещения или сноса течением с помощью канатной расчалки;
3) обратной лопатой — отрытие траншей и котлованов в обычных грунтовых условиях;
4) краном — навеска утяжеляющих грузов на трубу, производство погрузочно-разгрузочных и монтажных работ на болотах, а также поймах рек и реках с высотой уровня воды не более 0,9 м.
Поворотная часть экскаватора ЭКБ-1, кроме пульта управления, заимствована от того же экскаватора Э-302. Основное его отличие от экскаватора ЭПГ-1 заключается в конструкции ходовой части, представляющей собой ходовую раму сварной конструкции, опирающуюся на правую и левую ходовые тележки. Шины имеют размер 1500 X 840 мм, имеющие централизованную подкачку.
Развитая опорная поверхность катков-понтонов и наличие плавучести обеспечивает проходимость и работу экскаватора на болотах всех типов.
Централизованная система подкачки шин с пультом управления в кабине машиниста обеспечивает необходимое увеличение давления в шинах при передвижении и работе на твердых грунтах и снижение его на болотистых и мягких грунтах.
При движении по болоту избыточное давление в шинах устанавливается в интервале 0,2—0,3 кгс/см2, а при движении по дорогам и твердым грунтам — 0,7—0,8 кгс/см2.
Машинист экскаватора устанавливает и контролирует давление в шинах по показаниям манометра, расположенного в кабине.
Пневматический ход экскаватора обеспечивает перегон его своим ходом на расстоянии до 200 км без заметного износа узлов ходовой части (в отличие от гусеничных экскаваторов).
Конструкция ходовой части в сочетании с применением специального дышла делают возможным транспортировку экскаватора на большие расстояния на седельном тягаче или за ним со скоростью 20—25 км/ч. При этом дышло устанавливается вместо передних катков экскаватора. |
|
|
 Скачать 12.69 Mb.
Скачать 12.69 Mb.