Ответы на вопросы. 1. Влияние различных факторов на проходимость автомобиля
 Скачать 284.8 Kb. Скачать 284.8 Kb.
|

|
12) Назначение и классификация дорожных знаков Назначение и классификация дорожных знаков 1) ГОСТ Р 52289-2004 «Правила применения дорожных знаков, разметки, дорожных ограждений, светофоров и ограждающих устройств» 2) ГОСТ Р 52290-2004 «Знаки дорожные» На автомобильных дорогах и улицах для организации безопасности движения применяют дорожные знаки. Они устанавливают определенный порядок движения или информируют водителей и пешеходов об условиях движения на пути их следования. Все дорожные знаки классифицируют: 1. по информационно-смысловому содержанию. 2. по признакам конструктивного исполнения. В нашей стране применяют 8 групп дорожных знаков. 1. предупреждающие; 2. знаки приоритета; 3. запрещающие; 4. предписывающие; 5. знаки особых предписаний; 6. информационные знаки. 7. знаки сервиса 8. знаки дополнительной информации (таблички). В целях быстрого и надежного восприятия дорожные знаки характеризуются определенной формой, размером и цвета фона. По традиции предупреждающие знаки имеют форму треугольника, запрещающие и предписывающие имеют форму круга, знаки особых предписаний, указательные и знаки сервиса выполнены в форме квадрата или прямоугольника, знаки приоритета могут иметь одну из перечисленных форм. Качество восприятия информации зависит от времени, в течении которого водитель видит знак и его условию размера а.  Процесс восприятия знака водителем затрудняется: 1) с увеличением скорости движения; 2) с увеличением числа полос движения; 3) с увеличением интенсивности движения. С учетом порогового углового размера максимально разрешенной скорости движения и видимости (в светлое время суток) Vp – максимально разрешенная скорость (расчетная). Дорожные знаки изготавливают 4 типов размеров: 1) малого типоразмера; 2) нормального типоразмера; 3) большого типоразмера; 4) очень большого типорамера. 13. Виды поворачиваемости автомобилей Поворачиваемость бывает недостаточной, избыточной и нейтральной. 14. Основные принципы пофазного разъезда. 1. Стремиться к минимальному числу фаз в цикле регулирования. 2. Учитывать, что допускается совмещать в одной фазе левоповоротный поток, конфликтующий с определяющим длительность фазы встречным потоком прямого направления, если интенсивность левоповоротного потока не превышает 120 авт/ч. 3. Обеспечивать бесконфликтный пропуск пешеходов; в крайнем случае пешеходный поток и конфликтующие с ним поворачивающие транспортные потоки можно пропускать в одной фазе, если интенсивность пешеходного потока не превышает 900 чел/ч, а поворачивающих транспортных потоков - не превышают 120 авт/ч. 4. Не выпускать из одной и той же полосы транспортные средства, движение которых предусмотрено в разных фазах, т.е. полосы движения закрепляют за определенными фазами. 5. Стремится к равномерной загрузке полос. Интенсивность движения, в среднем приходящаяся на одну полосу, не должна превышать 700 ед/ч. 6. При широкой проезжей части (три полосы движения и более в одном направлении) и наличии островков безопасности следует рассматривать возможность поэтапного перехода пешеходами улицы в течении двух следующих друг за другом фаз регулирования. 15. Влияние различных факторов на управляемость автомобиля Установка управляемых колес. Правильная установка управляемых колес с развалом в вертикальной плоскости и со схождением в горизонтальной, а также регулировка углов развала и схождения колес существенно влияют на управляемость автомобиля. При их отклонении от требуемого положения возрастает сопротивление движению и может произойти изменение соотношения между углами поворота управляемых колес (внутреннего и наружного). В результате затрудняется управление автомобилем. При этом увеличивается износ шин и снижается топливная экономичность автомобиля. Поэтому в процессе эксплуатации необходимо правильно регулировать углы установки управляемых колес автомобиля. Стабилизация управляемых колес. Возмущающие силы, действующие на автомобиль при движении, стремятся нарушить нейтральное положение управляемых колес и вывести их из этого положения, отвечающего прямолинейному движению. Для того чтобы не произошел поворот управляемых колес под действием возмущающих сил (толчки от наезда на неровности дороги, порывы ветра и др.), колеса должны обладать соответствующей стабилизацией. При нарушении стабилизации управляемых колес затрудняется управление автомобилем, ухудшается безопасность движения, увеличивается износ шин и рулевого управления. В процессе эксплуатации стабилизация колес ухудшается при увеличении зазоров в подшипниках ступиц управляемых колес и шкворневых соединениях, а также из-за неправильной регулировки рулевого управления. Так, например, чрезмерная затяжка шаровых пальцев продольной рулевой тяги, конических подшипников и рабочей пары рулевого механизма увеличивает сопротивление в рулевом управлении, затрудняет возвращение рулевого колеса в нейтральное положение и усложняет управление автомобилем. В процессе эксплуатации необходимая стабилизация управляемых колес достигается регулировкой углов наклона шкворней или оси поворота колес в поперечной и продольной плоскостях. Подвеска и шины. У легковых автомобилей ухудшение управляемости при эксплуатации может быть вызвано остаточной деформацией пружин передней независимой подвески. В результате осадки пружин рычаги подвески при перемещениях изменяют углы развала колес и поперечного наклона шкворней, нарушая при этом установку и стабилизацию управляемых колес. К тому же при осадке одной из пружин подвески указанные углы изменяются только с одной стороны автомобиля. Вследствие этого стабилизирующие моменты на управляемых колесах не будут уравновешиваться при прямолинейном движении и автомобиль начнет уводить в сторону. При уменьшении давления воздуха в одной из шин колес автомобиля увеличивается ее сопротивление качению и снижается боковая жесткость шины. В связи с этим автомобиль при движении постоянно отклоняется в сторону шины с уменьшенным давлением воздуха. Блокировка колес при торможении. При торможении автомобиля одновременная блокировка (доведение до юза) передних и задних колес может произойти только на дорогах с определенным оптимальным коэффициентом сцепления φопт = 0,4...0,45. На дорогах с другими значениями коэффициента сцепления происходит блокировка сначала либо передних, либо задних колес. Так, при торможении на дорогах с коэффициентом сцепления меньше оптимального (φх < φопт) у автомобиля первыми блокируются передние управляемые колеса. Это может привести к потере управляемости автомобиля. При торможении на дорогах с коэффициентом сцепления больше оптимального (φх> φопт) у автомобиля первыми доводятся до юза задние ведущие колеса, что может привести к заносу. Колебания управляемых колес. При движении возникающие колебания управляемых колес вокруг шкворней (осей поворота) в горизонтальной плоскости происходят с высокой и низкой частотами. Колебания колес с высокой частотой (более 10 Гц) совершаются в пределах упругости рулевого привода и шин. Они поглощаются в рулевом управлении, не передаются на рулевое колесо и не нарушают управляемости автомобиля. Однако колебания высокой частоты вызывают дополнительный износ шин и деталей рулевого привода, возрастание сопротивления движению и снижение топливной экономичности автомобиля. Колебания колес с низкой частотой (менее 1 Гц) нарушают управляемость автомобиля и безопасность движения. Для устранения их влияния следует снижать скорость движения автомобиля. Колебания управляемых колес вокруг шкворней полностью устранить невозможно, их можно только уменьшить. Это достигается различными конструктивными мерами: применением независимой подвески управляемых колес, их балансировкой и др. В результате уменьшается гироскопическая связь между колесами и устраняется их неуравновешенность, вызывающие колебания колес вокруг шкворней. Усилители рулевого управления. В рулевых управлениях автомобилей применяют гидравлические, пневматические и электрические усилители. Среди них наибольшее распространение получили гидроусилители. Так, 90 % всех автомобилей с усилителями рулевого управления оборудованы гидравлическими усилителями. Гидроусилитель значительно облегчает работу водителя, который при его наличии прикладывает к рулевому колесу в 2 — 3 раза меньшее усилие, чем без гидроусилителя. Так, например, для поворота автомобиля средней и большой грузоподъемности и автобусов без рулевых усилителей требуется усилие водителя до 400 Н и более. Это очень существенно, так как из всей затрачиваемой водителем энергии на управление автомобилем 50 % приходится на рулевое управление. Кроме того, гидроусилитель смягчает толчки и удары от дорожных неровностей, передаваемые от управляемых колес на рулевое колесо. Гидроусилитель также повышает безопасность движения при повреждении шин управляемых колес (прокол, разрыв и т.п.) и маневренность автомобиля. Маневренность автомобиля возрастает при быстром и точном действии гидроусилителя. Так, время срабатывания гидроусилителей составляет 0,2...2,4 с (у пневмоусилителей оно в 5—10 раз больше). Это приводит к высокой точности при управлении автомобилем в процессе поворота на закруглениях дорог. Кузов автомобиля.Форма кузова легковых автомобилей оказывает существенное влияние на их управляемость, так как она определяет метацентр автомобиля — точку приложения боковой аэродинамической силы Рб (силы ветра). У автомобилей метацентр обычно не совпадает с их центром тяжести. Так, у одних автомобилей метацентр расположен перед центром тяжести, а у других — за ним. Если метацентр находится перед центром тяжести автомобиля, то при действии бокового ветра двигавшийся прямолинейно автомобиль начнет поворачиваться в направлении действия силы ветра. Это вызовет появление центробежной силы Рц, под влиянием которой увеличится склонность автомобиля к повороту. Если метацентр находится за центром тяжести автомобиля, то при действии бокового ветра Рб' автомобиль будет стремиться повернуть против ветра. Возникающая при этом центробежная сила Рц' будет способствовать уменьшению поворота автомобиля. Таким образом, для обеспечения лучшей управляемости автомобиля при действии бокового ветра необходимо, чтобы метацентр располагался за центром тяжести автомобиля. Это может быть достигнуто соответствующей формой кузова автомобиля, например с пониженным капотом двигателя, высокими задними крыльями и др. Квалификация водителя. Управляемость автомобиля и точность выполнения маневра во многом зависят от квалификации водителя. Управление автомобилем на повороте представляет собой сложный процесс, состоящий из нескольких фаз: вход автомобиля в поворот, его поворот и выход из поворота. При управлении автомобилем водители, не имеющие достаточного опыта, часто допускают ошибки: выводят автомобиль за осевую линию дороги, за пределы занимаемого ряда и срезают углы при маневрировании. Все подобные действия приводят к нарушению не только управляемости автомобиля, но и безопасности движения. 16. Назначение и виды дорожной разметки Разметкой называются линии, надписи и другие обозначения на проезжей части и элементах дорожных сооружений, устанавливающие порядок движения или информирующие водителей и пешеходов об условиях движения. Разметка — маркировка на покрытии автомобильных дорог, служащая для сообщения определённой информации участникам дорожного движения. Разметка делится на горизонтальную и вертикальную. К вертикальной разметке относятся линии, наносимые на элементы дорожных сооружений, обстановки дорог и различных предметов, которые представляют опасность для движения, с целью предупреждения наезда на них транспортных средств. К горизонтальной разметке относятся продольные сплошные, продольные прерывистые, поперечные линии; надписи; указательные стрелы; символы ДЗ. При этом важной характеристикой продольных прерывистых линий является отношение длин штриха и разрыва, а также их общая длина. 17. Силы, действующие на автомобиль при повороте Процесс движения автомобиля на повороте включает в себя три фазы (рисунок 1.3, а): вход в поворот (участок АБ), поворот (БВ) и выход из него (ВГ). При входе в поворот управляемые колеса двигавшегося прямолинейно автомобиля поворачиваются, и он движется по кривой уменьшающегося радиуса. При повороте управляемые колеса повернуты на определенный угол, и движение происходит по кривой постоянного радиуса. При выходе из поворота управляемые колеса возвращаются в нейтральное положение, и автомобиль движется по кривой увеличивающегося радиуса, а затем — прямолинейно. Во время движения на повороте на автомобиль (рисунок 1.3, б) действуют следующие силы: центробежная рц и ее поперечная ру и продольная рх составляющие, а также поперечные реакции дороги: Ry1 — на передний и Ry2 — на задний мосты. Основной действующей силой при повороте является поперечная составляющая Pу центробежной силы, которая направлена перпендикулярно продольной оси автомобиля и представляет собой сумму трех сил:  Сила P’у всегда возникает при криволинейном движении. Она пропорциональна квадрату скорости и действует в процессе всего поворота. Сила P’’у появляется в результате изменения угла поворота управляемых колес и действует при входе и выходе из поворота. Сила Pу возникает вследствие изменения скорости движения и действует только при неравномерном движении на повороте. Из трех указанных составляющих наибольшее значение имеет сила P’у, на долю которой приходится 90 % силы Pу. Поэтому для автомобилей общего назначения и специализированных автомобилей силами P’у и P’’у пренебрегают. 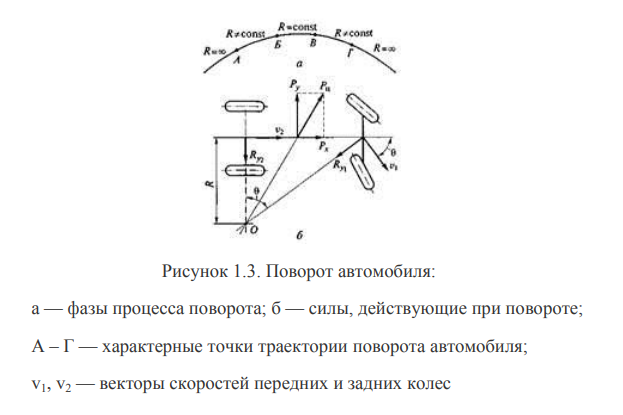 Поворот автомобиля: а — фазы процесса поворота; б — силы, действующие при повороте; А – Г — характерные точки траектории поворота автомобиля; v1, v2 — векторы скоростей передних и задних колес Их учитывают только для специальных автомобилей (пожарные, автомобили «скорой помощи» и др.), движущихся на поворотах с более высокими скоростями. При равномерном движении на повороте поперечная составляющая центробежной силы  Она пропорциональна квадрату скорости движения, поэтому быстро возрастает при увеличении скорости. Поперечные реакции дороги на передний и задний мосты при равномерном движении на повороте  Из этих выражений следует, что центробежные силы, действующие на передний и задний мосты, можно считать пропорциональными приходящемуся на них весу G1, и G2 18. Структура светофорного цикла и потерянное время в цикле регулирования Структура светофорного цикла. Поочередное предоставление права на движение предполагает периодичность или цикличность работы светофорного объекта. Для количественной и качественной характеристики его работы существуют понятия такта, фазы и цикла регулирования. Тактом регулирования называется период действия определенной комбинации светофорных сигналов. Такты бывают основные и промежуточные. В период основного такта разрешено движение определенной группы транспортных и пешеходных потоков. Во время промежуточного такта выезд на перекресток запрещен, за исключением транспортных средств, водители которых не смогли своевременно остановиться у стоп-линии. Фазой регулирования называется совокупность основного и следующего за ним промежуточного такта. Минимальное число фаз равно двум. Обычно число фаз регулирования соответствует числу наиболее загруженных конфликтных направлений движения на перекрестке. Циклом регулирования называется периодически повторяющаяся совокупность всех фаз. Под режимом светофорного регулирования (светофорной сигнализации) понимаются длительность цикла, а также число, порядок чередования и длительность составляющих цикл тактов и фаз. где ТП— длительность цикла регулирования, с; tO1, ..., tOn — длительности основного такта, с; tПn— длительность промежуточного такта, с; n — число фаз. Потерянное время в цикле регулирования. В течение фазы регулирования транспортные средства движутся в направлении, в котором включен разрешающий сигнал, в период основного такта tO. В период промежуточного такта tП интенсивность движения в сечении стоп-линии постепенно падает до нуля. Вместе с тем в начале основного такта ожидающие разрешающего сигнала транспортные средства начинают движение с некоторой задержкой, которая связана с реакцией водителя на разрешающий сигнал и с разгоном транспортных средств. При этом интенсивность движения N в сечении стоп-линии постепенно нарастает и достигает через некоторое время приблизительно постоянного значения МН, равного пропускной способности данного направления. Задержка в движении в начале такта tO, называется стартовой задержкой (tст,). Это потерянное время в фазе, так как практически движение в этот период отсутствует. К потерянному времени следует отнести и промежуточный такт за вычетом времени tр — «прорыва» на желтый сигнал транспортных средств, которые не смогли своевременно остановиться у стоп-линии. Таким образом, движение начинается позже момента включения разрешающего сигнала и заканчивается позже момента его окончания |