курсовая ЛСАР — копия. Анализ линейной сау
 Скачать 1.81 Mb. Скачать 1.81 Mb.
|

|
Некоммерческое акционерное общество «АЛМАТИНСКИЙ УНИВЕРСИТЕТ ЭНЕРГЕТИКИ И СВЯЗИ» Кафедра «Автоматизация и управление» ПОЯСНИТЕЛЬНАЯ ЗАПИСКА к курсовой работе по дисциплине «Линейные системы автоматического регулирования» Тема: Анализ линейной САУ Вариант:66 Специальность: «Автоматизацияиуправление» Выполнил: Султанов Адиль Группа: АИСУ-20-12 Принял: к.т.н., доцент ЮничеваН.Р. Работа защищена с оценкой  «»2022 г. Алматы 2022 Оглавление1.Структурная схема 4 2.ЛЧХ разомкнутой системы и устойчивость 6 3.Критический коэффициент усиления системы. АФЧХ и АЧХ системы. 7 4.ЛЧХ замкнутой системы. Амплитудно-фазовые искажения. 9 5.Полюса и нули замкнутой системы. Корневые показатели качества. 11 6.Переходная характеристика системы. Прямые показатели качества. 13 7.Коэффициенты ошибок. График ошибки системы при обработке линейного сигнала. 15 8.Реакция системы на гармонический сигнал. Амплитудно-фазовые искажения. 17 Заключение 21 Библиографический список 22 Введение В данной работе проводится анализ системы управления углом поворота. Такие системы очень распространены в наше время, т.к. имеют широкую область применения. Цель работы: приобретение навыков по анализу систем управления. Структурная схемаЗадана следующая функциональная схема системы: 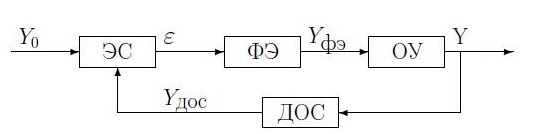 Рисунок 1 - Функциональная схема системы Таблица параметров для варианта 26:  Рисунок 2 - Таблица параметров для варианта 26 Тогда передаточные функции блоков будут иметь вид:  ; ; ; ; ; ;Составим структурную схему системы: 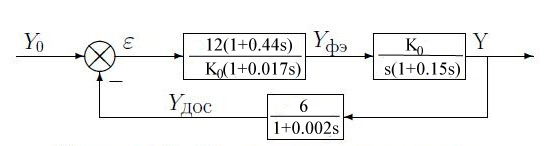 Рисунок 3 - Структурная схема системы Определим размерность управляемой величины: 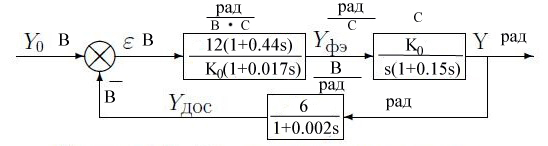 Рисунок 4 - Схема для определения размерности выходной величины Управляемая величина измеряется в радианах. Запишем передаточные функции системы (разомкнутой системы, замкнутой системы по выходу ОУ и передаточную функцию системы по ошибке). Передаточная функция разомкнутой системы:  ; ; ; ;Передаточная функция замкнутой системы по выходу ОУ:  ; ; ; ; ; ;Передаточная функция системы по ошибке:  ; ; ; ; ; ;ЛЧХ разомкнутой системы и устойчивостьДля построения ЛЧХ разомкнутой системы запишем передаточную функцию разомкнутой системы:  , ,где  , ,  , ,  , ,  . .Частоты сопряжений:   ; ; дек; дек; ; ; дек; дек; ; ; дек; дек; ; ; дек; дек;На нулевой частоте ЛАЧХ пересекает ось L, в точке (0; 37.1), где 37.1 – значение полученное как  . .Построим асимптотические логарифмические амплитудные и фазовые характеристики По построенным ЛАЧХ и ЛФЧХ найдем запасы устойчивости системы.  дБ; дБ; град; град;Проверим полученные запасы устойчивости с помощью программного пакета Matlab, функцией margin (рисунок 5). 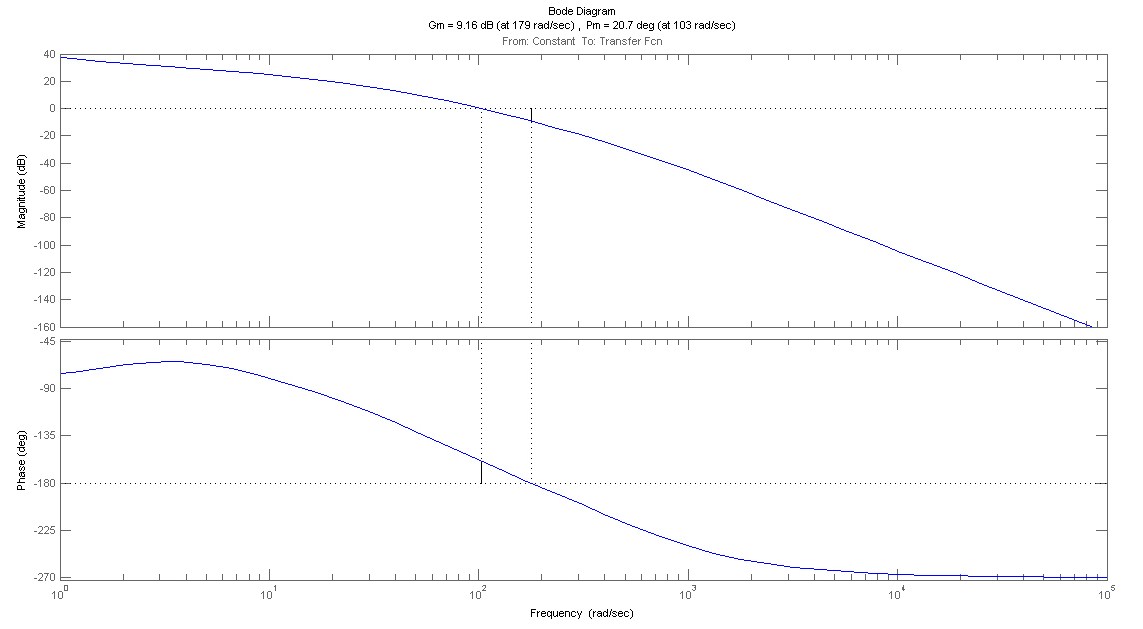 Рисунок 5 − Результаты функции margin в Matlab Как видно из рисунка 5, запасы устойчивости:  дБ; дБ; град; град;Расхождение данных с графиков асимптотических ЛЧХ и данных функции margin объясняется неточностью построения графиков ЛЧХ. При расчетах будем использовать более точные данные функции margin. Критический коэффициент усиления системы. АФЧХ и АЧХ системы.Найдем критический коэффициент усиления системы из графика ЛАЧХ разомкнутой системы. Из графика следует формула  ; ;Тогда  ; ;Построим АФЧХ разомкнутой системы. Для этого от передаточной функции разомкнутой системы перейдем к частотной передаточной функции разомкнутой системы и выделим действительную и мнимую часть. ; ; ; ; ; ; ; ; ; ; ;Найдем частоту, при которой Р равно 0:  рад/с ; рад/с ;Найдем частоту, при которой Q равно 0:  ; ;Из всех корней данного уравнения, нам подходит только  рад/с. рад/с.Приведем расчетную таблицу для построения АФЧХ: Таблица 3.1 Расчетные значения для АФЧХ
Значения P и Q получены с помощью программного пакета MathCAD 15 (рисунок 6). АФЧХ построим на миллиметровой бумаге. 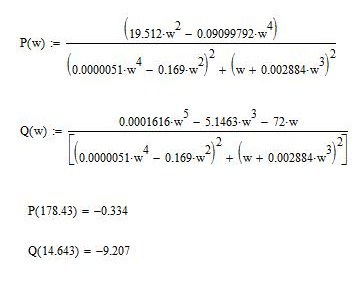 Рисунок 6 − Получение P и Q c помощью пакета MathCAD Запишем характеристическое уравнение разомкнутой системы:  ; ;Разомкнутая система находится на границе устойчивости, т.к. имеет место нулевой корень. Для анализа замкнутой системы по критерию Найквиста применяется вторая формулировка. Если разомкнутая система на границе устойчивости, то для устойчивости замкнутой системы необходимо и достаточно, чтобы годограф Найквиста, дополненный на участке разрыва дугой бесконечно большого радиуса, не охватывал особую точку (-1;0). Годограф Найквиста не охватывает особую точку (-1;0), значит, замкнутая система устойчива. Построим АЧХ замкнутой системы. Запишем частотную передаточную функцию замкнутой системы.  ; ; ; ;Рассуждения по получению ЧПФ из ПФ аналогичны тем, что были проведены при получении ЧПФ разомкнутой системы. АЧХ построим с помощью пакета MathCAD 15 (рисунок 7). Также с его помощью в режиме трассировки графика и некоторых вычислений были найдены полоса пропускания, частота амплитудного резонанса и показатель колебательности (рисунок 8). 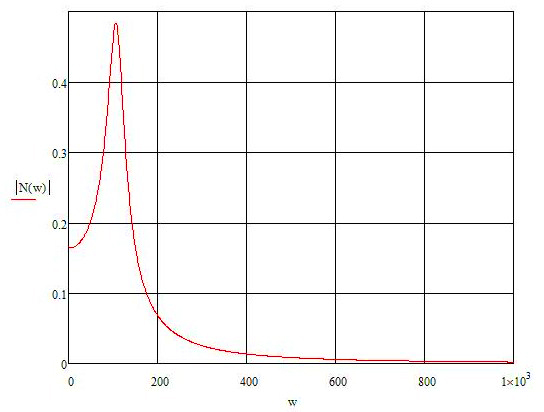 Рисунок 7 − АЧХ замкнутой системы 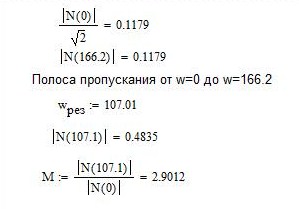 Рисунок 8 - Нахождение частоты резонанса, полосы пропускания и показателя колебательности в MathCAD Из рисунков 7 и 8: Полоса пропускания системы – 0..166.2 рад/с; Частота амплитудного резонанса  рад/с; рад/с;Показатель колебательности  . .ЛЧХ замкнутой системы. Амплитудно-фазовые искажения.Запишем частотную передаточную функцию замкнутой системы: ;Запишем действительную и мнимую часть ЧПФ:  ; ; ; ;Для расчета ЛЧХ используем формулы:  ; ; ; ; ; ;Построим ЛЧХ с помощью программного пакета Matlab, в среде Simulink (рисунок 10). Для построения используем модель (рисунок 9). 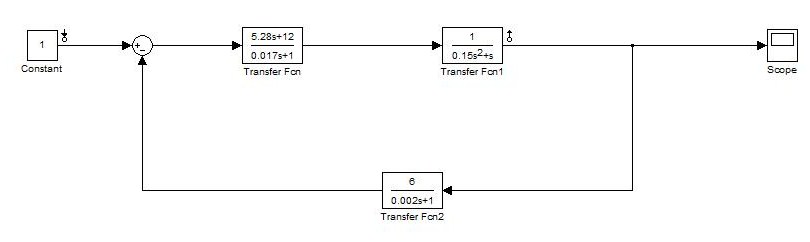 Рисунок 9 − Модель в среде Simulink для построения ЛЧХ замкнутой системы Определим величину амплитудно-фазовых искажений. По графикам ЛЧХ видно, что  дБ, дБ,  град. град.  ; ; ; ;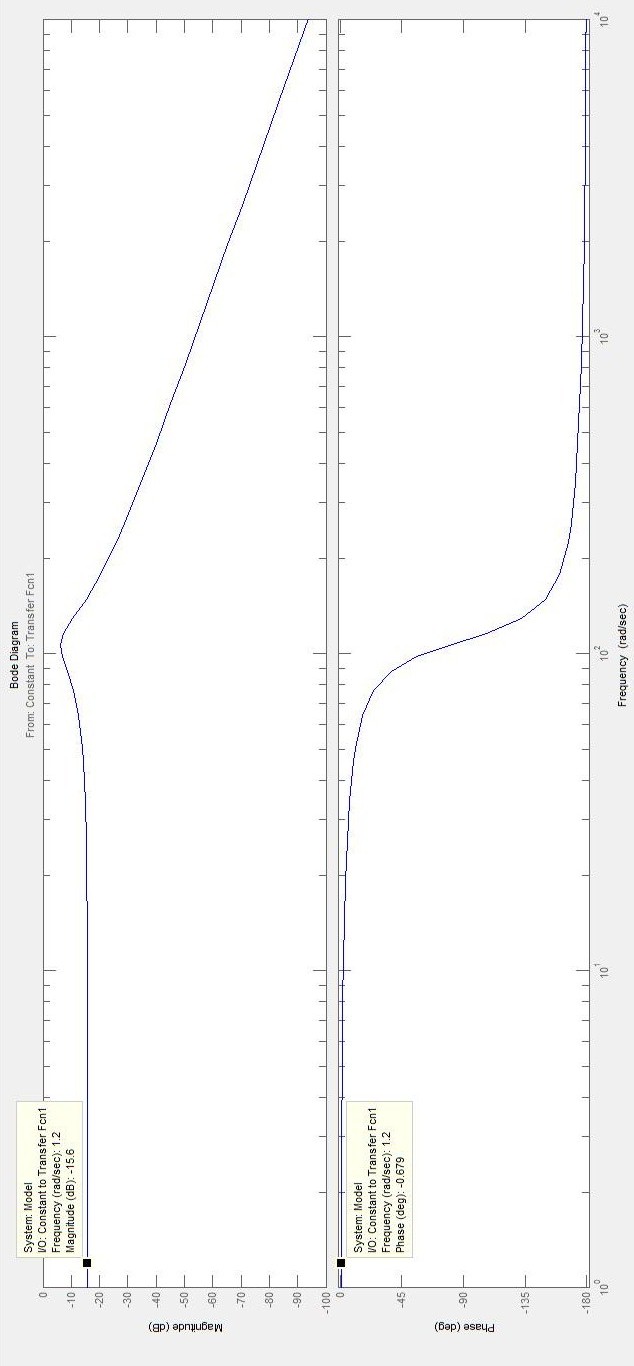    Рисунок 10 − ЛЧХ замкнутой системы [Введите цитату из документа или краткое описание интересного события. Надпись можно поместить в любое место документа. Для изменения форматирования надписи, содержащей броские цитаты, используйте вкладку "Работа с надписями".] [Введите цитату из документа или краткое описание интересного события. Надпись можно поместить в любое место документа. Для изменения форматирования надписи, содержащей броские цитаты, используйте вкладку "Работа с надписями".] Полюса и нули замкнутой системы. Корневые показатели качества.Найдем нули и полюса замкнутой системы, приравняв числитель и знаменатель передаточной функции к нулю. Числитель:  ; ; ; ; ; ; ; ;Знаменатель:  ; ;Найдем корни этого уравнения с помощью программного пакета MathCAD 15 (рисунок 11). 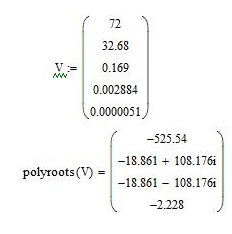 Рисунок 11 − Нахождение полюсов в MathCAD 15 Из рисунка 11:  ; ; ; ; ; ; ; ; - нули замкнутой системы, - нули замкнутой системы,  - полюса замкнутой системы. - полюса замкнутой системы.Изобразим нули и полюса на комплексной плоскости (рисунок 12) 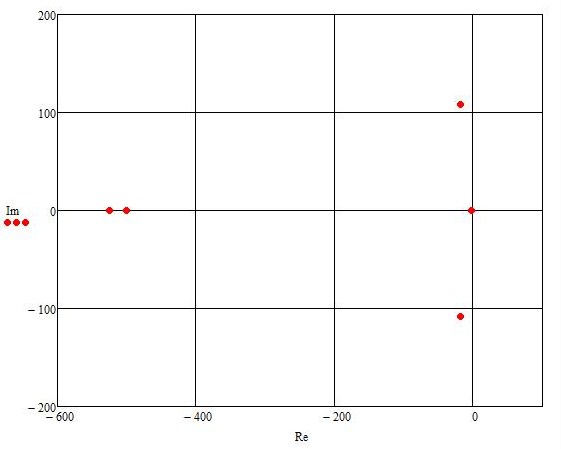 Рисунок 12 − Нули и полюса на комплексной плоскости Из-за разности порядка величин масштаб графика завышен, вследствие чего точки  и и  практически слились. Так как практически слились. Так как  это ноль, а это ноль, а  - полюс, проверим, не компенсируют ли они друг друга. Условие компенсации: - полюс, проверим, не компенсируют ли они друг друга. Условие компенсации:  , где , где  - полюс, а - полюс, а - ноль. - ноль.Подставим и в данное условие. − выполняется. Значит полюс и ноль взаимно компенсируются. − выполняется. Значит полюс и ноль взаимно компенсируются.Определим корневые показатели качества:  − показатель колебательности (отношение мнимой части ближайшего к оси Im комплексного корня, к его действительной части); − показатель колебательности (отношение мнимой части ближайшего к оси Im комплексного корня, к его действительной части);Оценим перерегулирование:   − степень устойчивости (расстояние от оси Im до ближайшего корня); − степень устойчивости (расстояние от оси Im до ближайшего корня);Оценим быстродействие системы. Примем  . . ; ;Переходная характеристика системы. Прямые показатели качества.Получим выражение для построения переходной характеристики системы:  ; ; ; ;Выполним обратное преобразование Лапласа в программном пакете MathCAD 15 c помощью функции invlaplace.   ; ;Построим переходную характеристику системы с помощью программного пакета Matlab в среде Simulink. Модель для построения переходной характеристики аналогична модели на рисунке 9 с небольшим дополнением для отображения коридора. 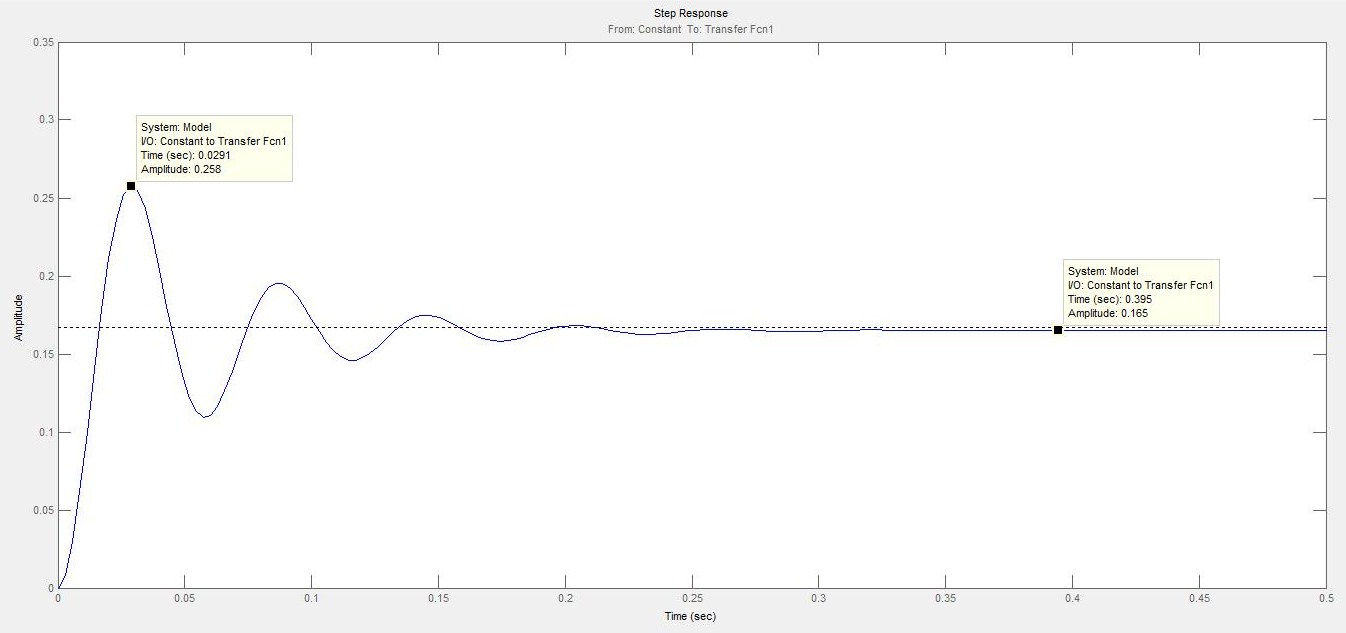 Рисунок 13 − Переходная характеристика системы Из рисунка 13 видно, что  , а , а  . .Определим перерегулирование системы:  ; ;Определим время переходного процесса  . Для этого отобразим на графике переходной характеристики 5%-ный коридор. График увеличен в окрестности точки вхождения переходной характеристики в коридор (рисунок 14). . Для этого отобразим на графике переходной характеристики 5%-ный коридор. График увеличен в окрестности точки вхождения переходной характеристики в коридор (рисунок 14).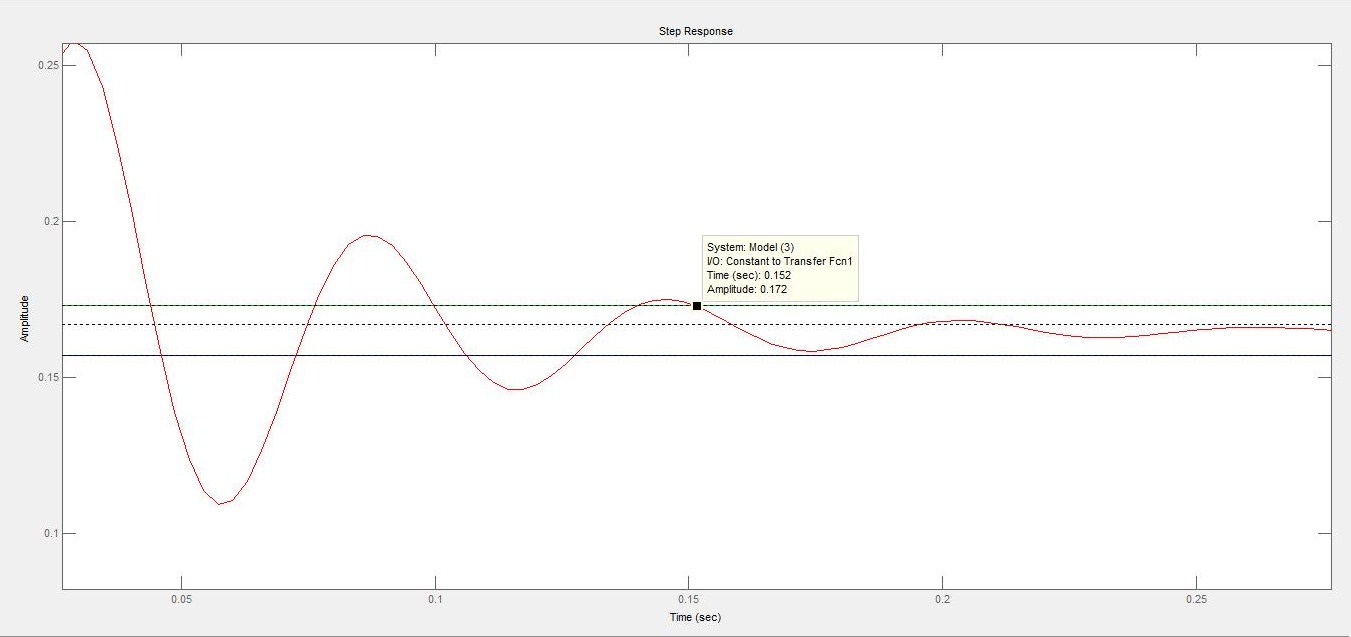 Рисунок 14 − Увеличение графика переходной характеристики для определения времени переходного процесса Из рисунка 14 −  с. с.Коэффициенты ошибок. График ошибки системы при обработке линейного сигнала.Рассчитаем коэффициенты ошибок системы.  ; ; − коэффициенты ошибок. − коэффициенты ошибок.Определим ошибку при линейно нарастающем входном сигнале.   ; ; ; ;Коэффициент  найдем с помощью программного пакета MathCAD 15 (рисунок 15). найдем с помощью программного пакета MathCAD 15 (рисунок 15). Из рисунка 15 видно, что  . .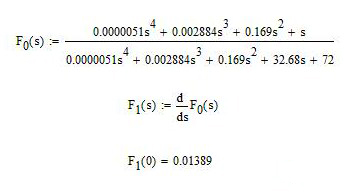 Рисунок 15 − Нахождение коэффициента в MathCAD 15 − расчетная ошибка. − расчетная ошибка.Т.к. входной линейно нарастающий сигнал система обрабатывает с постоянной ошибкой, можно сделать вывод, что в системе имеет место астатизм первого порядка. Это объясняется наличием в прямой цепи системы интегратора. Экспериментальную ошибку найдем с помощью функции invlaplace программного пакета MathCAD 15.  ; ;  ; ;С помощью программного пакета Matlab в среде Simulink построим график экспериментальной ошибок (рисунок 17). Для построения используем модель (рисунок 16). Осциллограф Scope1 покажет график ошибки. 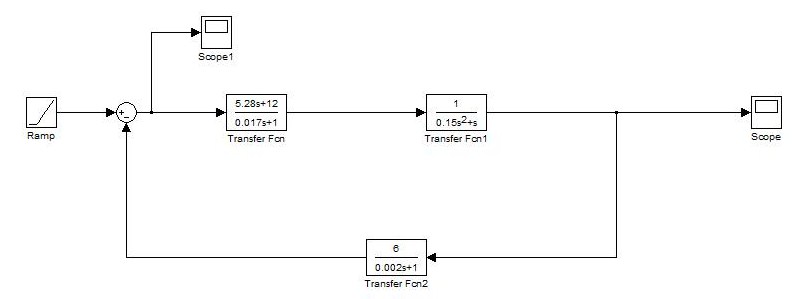 Рисунок 16 − Модель для получения графика ошибки при подаче на вход линейно нарастающего сигнала 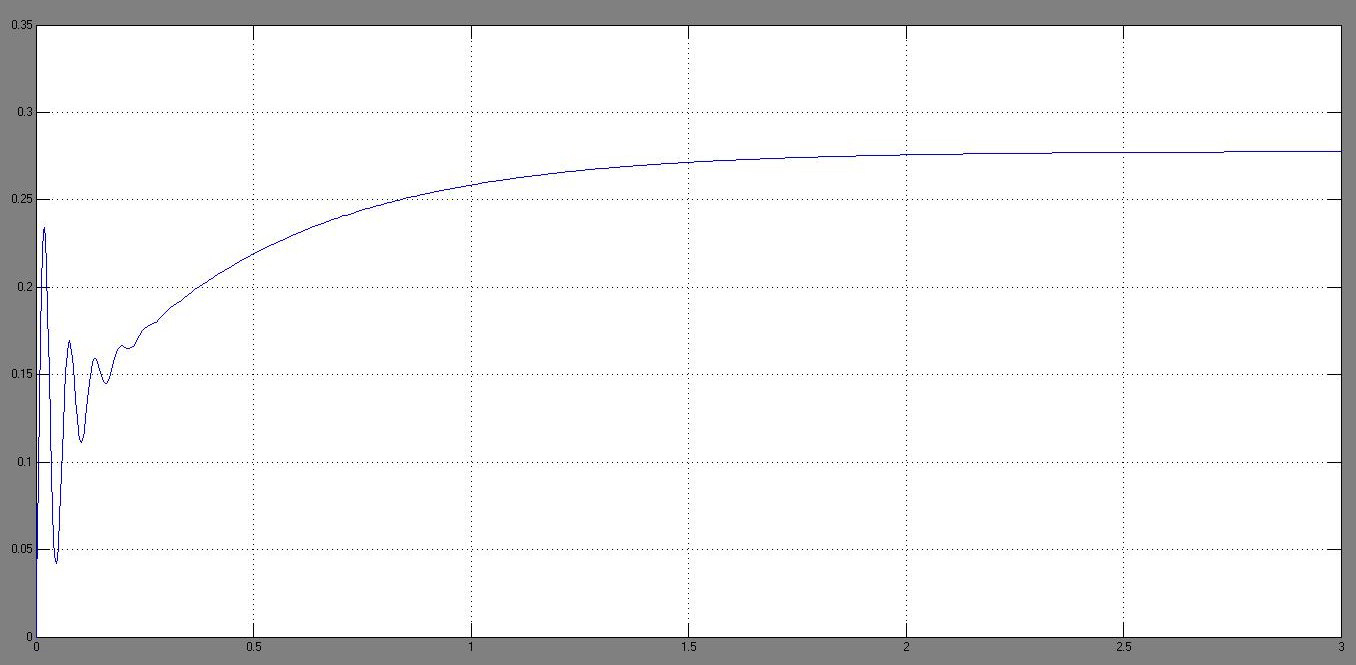 Рисунок 17 − График экспериментальной ошибки Как видно из графика, установившаяся ошибка стремится к расчетной. Реакция системы на гармонический сигнал. Амплитудно-фазовые искажения.Определим реакцию системы на гармонический входной сигнал с амплитудой А=20 В/с и частотой  рад/с. рад/с.Найдем изображение входного сигнала с помощью программного пакета MathCAD 15 (рисунок 18). 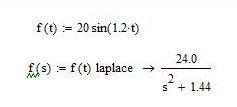 Рисунок 18 − Изображение входного сигнала в MathCAD 15 Тогда, реакция системы на входной гармонический сигнал, построенная в MathCAD 15 (рисунок 19):  ; ;  ; ;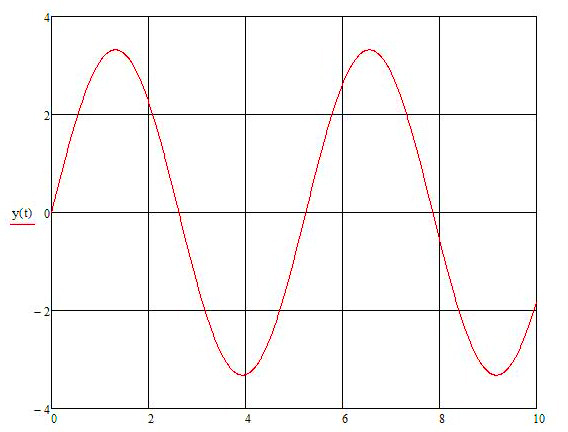 Рисунок 19 − Реакция системы на входной гармонический сигнал Ошибка системы при входном гармоническом сигнале (рисунок 20):  ; ;  ; ;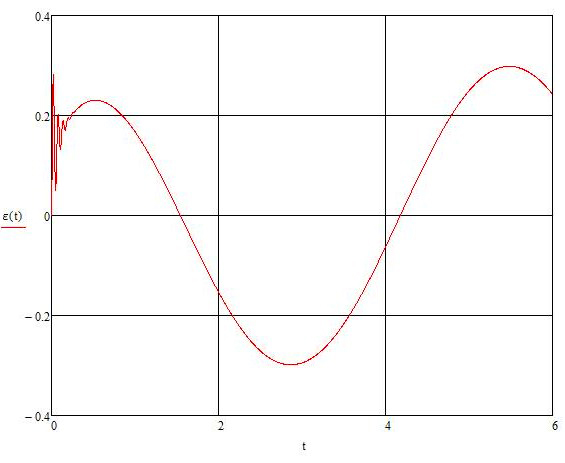 Рисунок 20 − Ошибка при входном гармоническом сигнале Определим амплитудно-фазовые искажения. Построим графики входного и выходного сигнала в одной плоскости с помощью программного пакета Matlab в среде Simulink (рисунок 22). Используем модель, приведенную на рисунке 21. 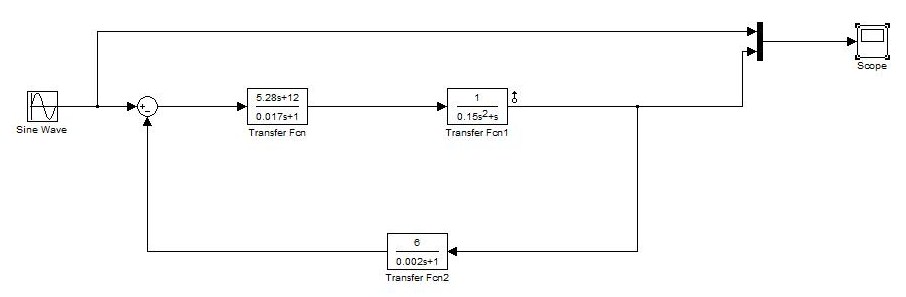 Рисунок 21 − Модель для построения на одной плоскости графиков входного и выходного сигналов 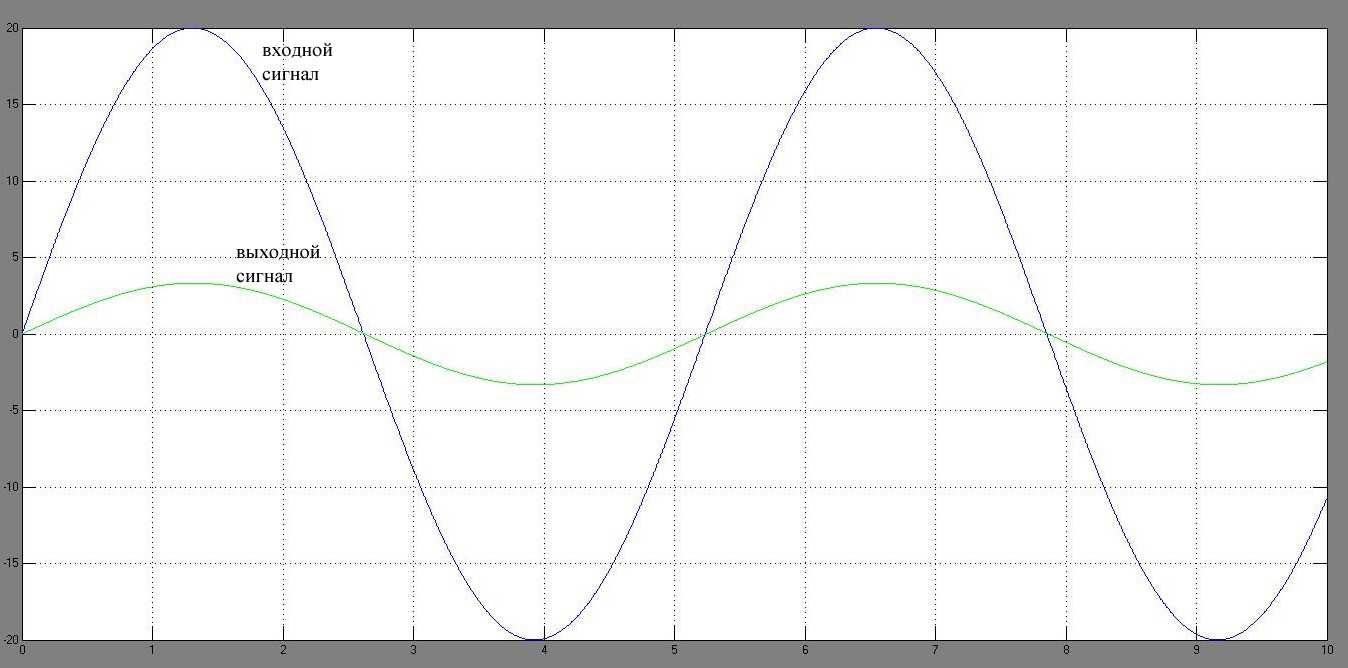 Рисунок 22 − Графики входного и выходного сигнала Амплитудные искажения  Для определения фазовых искажений увеличим график в окрестности пересечения функциями оси t (рисунок 23). Из графика на рисунке 23 −  , тогда , тогда  град. град.В пункте 4 мы получили значения  , град. , град.Небольшое расхождение в значениях связано с неточностью снятия данных с графиков. 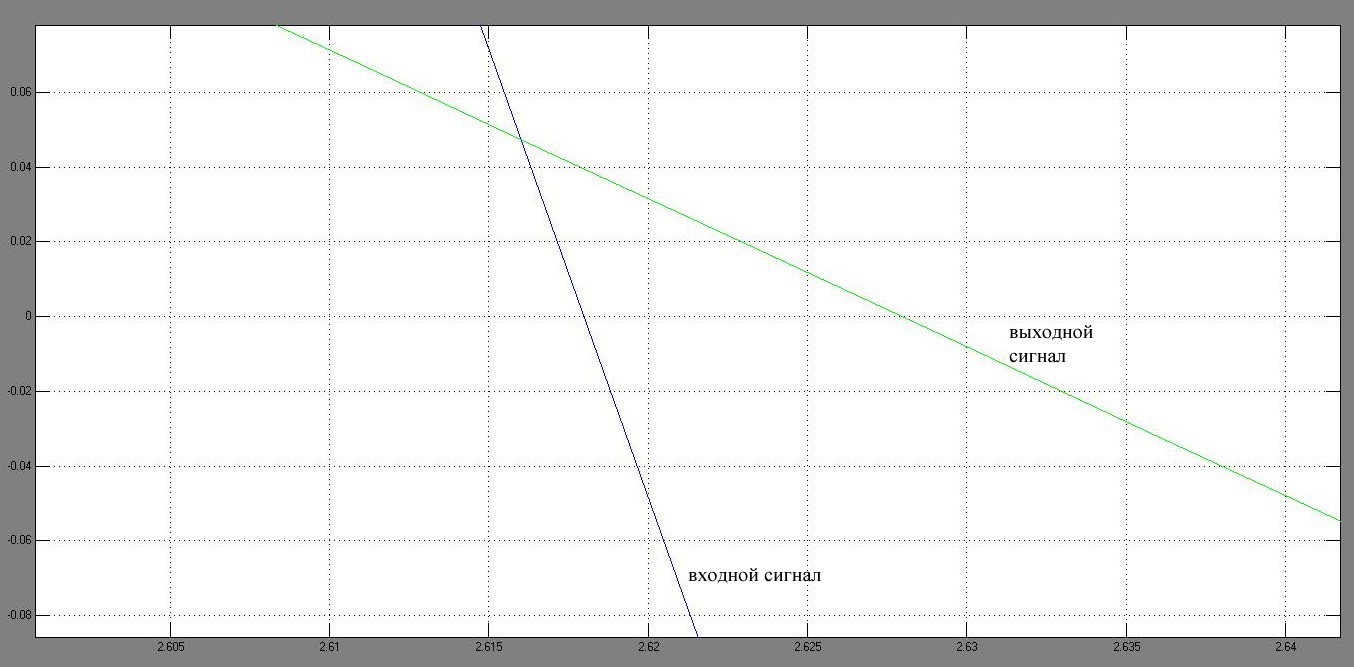 Рисунок 23 − Увеличение графиков входного и выходного сигнала в окрестности пересечения оси t Построим график вынужденной составляющей ошибки в MathCAD 15.  ; ; ; ; ; ;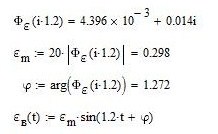 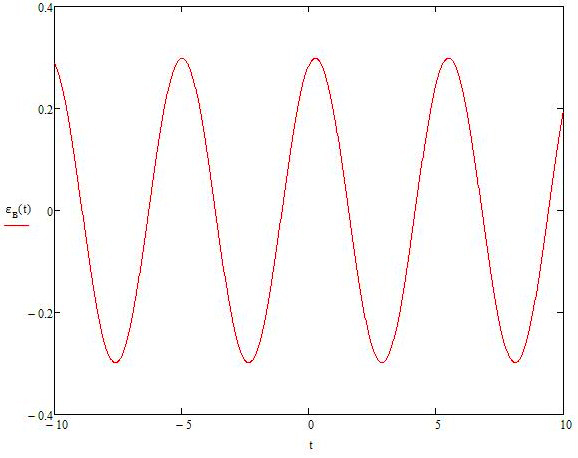 Рисунок 24 − График вынужденной составляющей ошибки ЗаключениеВ ходе выполнения курсовой работы был проведен анализ системы. Система оказалась устойчива, что было подтверждено критериями Найквиста с использованием АФЧХ и ЛЧХ. Были найдены: критический коэффициент усиления системы; прямые, частотные и корневые показатели качества. Также была исследована точность системы, рассчитаны и построены графики ошибок при отработке системой линейного и гармонического сигналов. К преимуществам системы можно отнести небольшое время переходного процесса, а также невысокие показатели перерегулирования и колебательности. Библиографический списокБесекерский, В.А.Теория систем автоматического регулирования / В.А. Бесекерский, Е.П. Попов. – 3-е изд. – Москва: Наука, 1975. – 767с. Макаров, И.М. Линейные автоматические системы / И.М. Макаров, Б.М. Менский. – 2-е изд. – Москва: Машиностроение, 1982. – 504 с. Павловская, О.О. Теория автоматического управления: учебное пособие к лабораторным и курсовым работам / О.О. Павловская, И.В. Чернецкая. – Челябинск: Издательский центр ЮУрГУ, 2010. – 93 с. Долбенков, В.И. Simulink в задачах систем автоматического управления: учебное пособие / В.И. Долбенков. – Челябинск: Изд-во ЮУрГУ, 2005. – 101 с. |


