Анализ плоских многозвенных механизмов
 Скачать 146.5 Kb. Скачать 146.5 Kb.
|

|
Министерство Российской Федерации по делам гражданской обороны, чрезвычайным ситуациям и ликвидации последствий стихийных бедствий ФГБОУ ВО Ивановская пожарно-спасательная академия ГПС МЧС России Кафедра механики, ремонта и деталей машин (в составе УНК «Пожаротушение») Курсовая работа по дисциплине: «Механика» Тема: «Анализ плоских многозвенных механизмов» Вариант № 00 Выполнил: Иванов А.В., факультет пожарной безопасности, 12 курс, 121 учебная группа Руководитель: старший преподавтель кафедры механики, ремонта и деталей машин (в составе УНК «Пожаротушение»), подполковник внутренней службы Н.А. Кропотова Дата защиты: «___» ____________ 2019 г. Оценка _______________________ ______________________________ (подпись руководителя) Иваново 2019 ОГЛАВЛЕНИЕ стр.
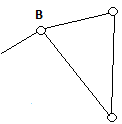
Введение Объем введения 3 – 5 листов. Должен быть раскрыт теоретический вопрос согласно варианту задания!!!!! (У каждого курсанта должно быть свое введение)!!!! Механика, которая в настоящее время объединяет такие дисциплины, как: ТММ; сопротивление материалов; детали машин и подъемно-транспортные машины; является одной из старейших отраслей наук. Известно, например, что еще при строительстве египетских пирамид использовались простейшие механизмы (рычаги, блоки и т.д.). Наука, как таковая, выделилась около 200 лет тому назад. Существенный вклад в развитие практической механики внесли такие ученые и изобретатели, как: М.В. Ломоносов; И.И. Ползунов – создатель паровой машины; И.П. Кулибин – создатель часов автоматов; механизма протеза и др.; отец и сын Черепановы, построившие первый в России паровоз; Л. Эйлер, разработавший теорию плоского зацепления и предложивший эвольвенты профиль зубьев колес, который используется в настоящее время [1]. Кинематика – это раздел теоретической механики, который дает представление о различных кинематических характеристик твердых тел, а так же соотношения между ними. Теория механизмов и машин (ТММ) является одним из разделов механики, в котором изучается строение, кинематика и динамика механизмов и машин в связи с их анализом и синтезом [2]. В ТММ изучаются свойства отдельных типовых механизмов, широко применяемых и самых различных машинах, приборах и устройствах. Основной задачей кинематики механизмов является изучение движения звеньев механизмов вне зависимости от сил, действующих на эти звенья. Механизмом называется система твердых тел, объединенных геометрическими или динамическими связями, и предназначенных для преобразования движения входного звена в требуемое движение выходных звеньев. Твердые тела, входящие в состав механизма, называются звеньями. Каждая подвижная деталь или группа деталей, образующая одну жесткую подвижную систему тел, называется подвижным звеном механизма. Соединение двух соприкасающихся звеньев, допускающее их относительное движение, называется кинематической парой. Рычажный механизм, механизм, состоящий из звеньев, соединённых между собой в низшие кинематические пары. Кривошип - звено кривошипного механизма, совершающее цикловое вращательное движение на полный оборот вокруг неподвижной оси. Как правило, выступает в роли ведущего звена рычажных и зубчато-рычажных механизмов Шатун (деталь) - деталь кривошипно-шатунного механизма, соединяющая поршень, совершающий возвратно-поступательное движение с коленчатым валом (или кривошипом) совершающим вращательное движение. Коромысло – звено, которое совершает неполный оборот вокруг своей оси. Благодаря механике в сфере МЧС России появилось много аварийно-спасательных инструментов. Например: Гидравлические аварийно-спасательные инструменты - резаки, разжимы, расширители, различные домкраты. 1 Структурный анализ механизмов 1.1 Структурный анализ механизма №1 В состав плоского многозвенного механизма №1 входят следующие звенья: 1) кривошип; 2) ферма; 3) шатун; 4) два ползуна. Таким образом, количество подвижных звеньев n=5. Звенья механизма образуют кинематические пары. Для определения количества кинематических пар, входящих в состав механизма №1 заполним таблицу 1, где для каждой кинематической пары определим ее класс и вид. Таблица № 1 Классификация кинематических пар механизма №1
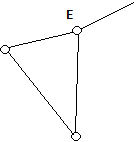
Таким образом, количество кинематических пар пятого класса p5=7, четвертого класса p4=0. Далее определяем степень подвижности механизма №1 по формуле П.Л. Чебышева: W=3∙n – 2∙p5 – p4; (1) где n – количество подвижных звеньев механизма, n=5; p4 – количество кинематических пар 4 класса, p4=0; p5 – количество кинематических пар 5 класса, p5=7. W =3∙5 – 2∙7=1. Поскольку степень подвижности механизма W=1, то данный механизм подвижен, не имеет лишних связей. 1.2 Структурный анализ механизма №2 1.3 Структурный анализ механизма №3 2 Построение механизмов в масштабе 2.1 Построение механизма №1 в масштабе Для построения механизма на листе формата А4 необходимо подобрать масштаб. Для этого переводим заданные размеры звеньев механизма №1 в метры: Масштаба построения механизма №1 будет определяться следующим образом:  =0.5/70=0.007м/мм. =0.5/70=0.007м/мм.После определения масштабного коэффициента механизма №1 перейдем к определению длин всех его звеньев в масштабе: Далее проводим построение механизма №1 в заданном положении на листе формата А4. 2.2 Построение механизма №2 в масштабе 2.3 Построение механизма №3 в масштабе 3 Определение скоростей шарниров механизмов 3.1 Определение скоростей шарниров механизма №1 Для определения скоростей шарниров механизма используем графоаналитический метод. Определение скорости точки А: Определение скорости точки В: Определение масштаба плана скоростей: Для определения скоростей шарниров звеньев, совершающих плоско-параллельное движение (шатуны, коромысла) воспользуемся теоремой о сложении скоростей при плоскопараллельном движении. Определение скорости точки С:  Все найденные вектора скоростей шарниров механизма представим на соответствующем плане скоростей механизма №1. 3.2 Определение скоростей шарниров механизма №2 3.3 Определение скоростей шарниров механизма №3 4 Определение угловых скоростей звеньев механизмов Для определения угловых скоростей звеньев механизма находим значения переносных скоростей данных звеньев графическим методом. Для этого длины векторов переносных скоростей данных звеньев умножаем на значение масштаба плана скоростей. Полученное значение переносной скорости соотносим с заданными длинами звеньев. 4.1 Определение угловых скоростей звеньев механизма №1 Угловая скорость звена АВ (кривошипа): Угловая скорость звена ВС (шатуна):  . .Угловая скорость звена СD (коромысла):  . .4.2 Определение угловых скоростей звеньев механизма №2 4.3 Определение угловых скоростей звеньев механизма №3 5 Определение ускорений шарниров механизмов 5.1 Определение ускорений шарниров механизма №1 Аналогично определению скоростей точек шарниров многозвенного механизма, воспользуемся графоаналитическим методом. Определение ускорения точки А: Определение ускорения точки В: Определение масштаба плана ускорений: Для определения ускорений шарниров звеньев многозвенного механизма, совершающих плоско-параллельное движение (шатуны, коромысла), воспользуемся теоремой о сложении ускорений при плоскопараллельном движении. Определение ускорения точки С:   ; ; ; ; ; ; ; ;Определение ускорения точки E Все найденные вектора ускорений шарниров механизма представим на соответствующем плане ускорений механизма №1. 5.2 Определение ускорений шарниров механизма №2 5.3 Определение ускорений шарниров механизма №3 6 Определение угловых ускорений звеньев механизмов Для определения угловых ускорений звеньев механизма находим значения касательных ускорений данных звеньев графическим методом. Для этого длины векторов касательных ускорений данных звеньев умножаем на значение масштаба плана ускорений. Полученное значение касательного ускорения соотносим с заданными длинами звеньев. 6.1 Определение угловых ускорений звеньев механизма №1 Угловое ускорение звена АВ (кривошипа): Угловое ускорение звена ВС (шатуна):  . .Угловое ускорение звена СD (коромысла):  . .6.2 Определение угловых ускорений звеньев механизма №2 6.3 Определение угловых ускорений звеньев механизма №3 Заключение В заключении указываются основные выводы и полученные результаты Список использованной литературы 1. Гурин, В.В. Механика: учебник для вузов / В.В.Гурин, В.В.Тихонов. – Томск: Изд-во Томского политехнического университета, 2011. – 366 с. 2. Тимофеев, Г.А. Теория механизмов и машин: учебное пособие/ Г.А. Тимофеев. – 2-е изд. перераб. и доп.- М.: Юрайт, 2011. – 351с. 3. Киселев, В.В. Механика. Контрольные задания (Часть 2): учебно-методическое пособие / А.А. Покровский, В.В. Киселев. – Иваново: ООНИ ИвИ ГПС МЧС России, 2012. – 88 с. 4. Покровский, А.А. Прикладная механика: учебное пособие для самостоятельной подготовки / А.А. Покровский, В.В. Киселев, Д.А.Ульев. – Иваново: ООНИ ИвИ ГПС МЧС России, 2012. – 91 с. 5. Покровский, А.А. Прикладная механика. Кинематика: учебное пособие / А.А. Покровский, В.В. Киселев, В.Е. Иванов, М.А. Ноздрин. – Иваново: ООНИ ЭКО ФГБОУ ВПО Ивановского института ГПС МЧС России, 2014. – 114 с. 6. Покровский, А.А. Сложное движение точки: методические указания и контрольные задания / А.А. Покровский, Д.А. Ульев. – Иваново: ООНИ ИвИ ГПС МЧС России, 2010. – 26 с. 7. Топоров, А.В. Кинематический анализ рычажного механизма: учебно-методическое пособие / А.В. Топоров, Е.А. Топорова, Д.А. Ульев. – Иваново: ООНИ ИвИ ГПС МЧС России, 2011. – 80 с. 8. Топоров, А.В. Динамика точки: учебно-методическое пособие / А.В. Топоров, В.В. Киселев. – Иваново: ООНИ ИвИ ГПС МЧС России, 2011. – 94 с. 9. Топоров, А.В. Произвольная плоская система сил: учебное пособие / А.В.Топоров, В.В.Киселев. – Иваново: ООНИ ИвИ ГПС МЧС России, 2013. – 82 с. 10. Семенов, Ю.А. Теория механизмов и машин в примерах и задачах. / Ю.А. Семенов, Н.С. Семенова. – Часть 1: учеб. пособие. СПб.: Изд-во Политехн. ун-та, 2015. – 284 с. 11. Теория механизмов и машин: учебник для студ. учреждений высш. проф. образования / М.З. Коловский, А.Н. Евграфов, Ю.А. Семёнов, А.В. Слоущ. – 4-е изд., перераб. – М.: Издательский центр «Академия», 2013. – 560 с. (Указывается не менее десяти источников литературы, не считая интернет ресурсов. Источники литературы не старше 10 лет!) В конец пояснительной записки помещаются 3 чертежа с механизмами и планами скоростей и ускорений на формате А4. Листы чертежей не нумеруются. |