Цифровые устройства. Что такое цифровые микросхемы. Виды цифровых микросхем
 Скачать 2.25 Mb. Скачать 2.25 Mb.
|

DSP-портыСтруктура последовательного порта в основном определяется типом данных, передаваемых по этому порту. При цифровой обработке сигналов требуется передавать непрерывные потоки информации. Обработкой данных обычно занимаются цифровые сигнальные процессоры (DSP), поэтому последовательные порты, предназначенные для передачи цифровой информации с максимальной скоростью, называются DSP портами. Какие данные могут образовывать непрерывные потоки? Чаще всего это звуковые или видеосигналы, хотя в качестве сигнала, образующего непрерывный поток данных могут выступать сигналы измерения биотоков живого организма или сигналы геомагнитных измерений. Как можно определить из определения природы таких сигналов, источником цифрового потока должен быть аналого-цифровой преобразователь (АЦП). Если микросхема является приёмником цифрового потока данных, то в ее состав входит цифро-аналоговый преобразователь (ЦАП). При преобразовании аналоговой информации в цифровую форму и наоборот очень важно обеспечить стабильность тактового сигнала. Такой сигнал обычно вырабатывается специальными термостабилизированными высокостабильными генераторами, питаемыми от отдельного стабилизатора питания. Скорость передачи информации в цифро-аналоговый или аналого-цифровой преобразователь должна быть строго согласована по времени со скоростью передачи по каналу связи (последовательному порту). Именно поэтому сигналы синхронизации, необходимые для работы DSP порта, вырабатываются из входного высокостабильного тактового сигнала самой микросхемой аналого-цифрового или цифро-аналогового преобразователя. Проще всего преобразовать число, представленное в параллельном коде, в последовательный вид можно при помощи сдвигового регистра. При этом на приёмном конце важно знать момент, когда производится запись в этот регистр. Знание этого момента времени позволит определить, какой из передаваемых бит является старшим значащим разрядом, а какой - младшим. Так как поток двоичной информации передаётся постоянно, то сигналы записи в регистр будут подаваться с одним и тем же периодом. Выходной двоичный код бит за битом можно снимать с последнего выхода сдвигового регистра. Для того чтобы на приёмном конце этот сигнал принимался без ошибок, каждый бит должен сопровождаться синхронизирующим импульсом. При этом чтобы отличать синхросигналы друг от друга, импульсы, сопровождающие информационные биты, стали называть тактовой синхронизацией (CLK), а сигнал, отмечающий момент записи в регистр - кадровой синхронизацией (FS). Сигналы кадровой и тактовой синхронизации должны быть жестко связаны между собой, поэтому для их формирования обычно используется цифровой счётчик. Давайте рассмотрим пример передачи восьмиразрядного последовательного слова. В качестве источника цифрового потока используем аналого-цифровой преобразователь. Получившаяся в результате схема синхронного последовательного порта приведена на рисунке 12.2.10 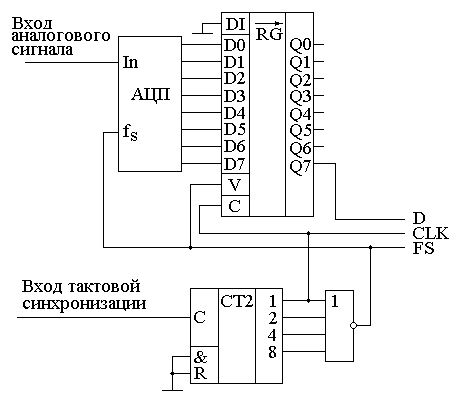 Рисунок 12.2.10 Схема последовательного DSP-порта Как видно из приведенной схемы, на вход двоичного счётчика подаются импульсы от генератора высокостабильных колебаний. Из этих импульсов вырабатывается сигнал тактовой синхронизации, который подается на выход схемы и поступает на вход синхронизации сдвигового регистра. Логический элемент "4ИЛИ-НЕ", подключенный к выходу четырёхразрядного счётчика формирует импульсы кадровой синхронизации с частотой в восемь раз меньшей частоты тактовой синхронизации. Такую частоту можно было бы получить с выхода "8" двоичного счётчика, но нам требуется длительность импульса, равная длительности импульса тактовой синхронизации. Логический элемент "4ИЛИ" позволяет декодировать нулевое состояние счётчика. В результате этого на его выходе длительность импульса равна длительности импульсов тактовой синхронизации, а сам импульс появляется в самом начале кадра передачи данных с выхода АЦП. В свою очередь длительность импульсов на выводе CLK равна периоду сигнала тактовой синхронизации, так как этот сигнал снимается с выхода младшего разряда двоичного счётчика. Кадр передачи данных начинается с параллельной записи результата преобразования АЦП в передающий сдвиговый регистр. Для этого импульс кадровой синхронизации подаётся на вход параллельной записи в регистр сдвига. В приведённой на рисунке 12.2.10 схеме запись в регистр осуществляется по переднему фронту этого импульса. Этот же импульс кадровой синхронизации подаётся на вход синхронизации аналого-цифрового преобразователя. Внутренняя схема АЦП выполнена так, чтобы аналого-цифровое преобразование начиналось по заднему фронту импульса. Такой подбор схем АЦП и регистра сдвига позволяет сначала записать результат в регистр, а затем начать новое преобразование аналогового сигнала в цифровую форму по одному и тому же импульсу синхронизации. Пример временных диаграмм сигналов данных и сопровождающих их сигналов тактовой и кадровой синхронизации на выходе последовательного DSP-порта приведен на рисунке 12.2.11.  Рисунок 12.2.11 Временные диаграммы сигналов на выходе синхронного последовательного DSP-порта В приведенных временных диаграммах осуществляется передача двоичного числа 100111002. При этом запись информации в последовательный регистр производится по сигналу кадровой синхронизации FS. В этот момент на выходе Q7 регистра сдвига появляется старший бит результата преобразования. Начиная от этого момента, начинают отсчитываться импульсы тактовой синхронизации CLK. Приведенный на рисунке 12.2.10 регистр осуществляет сдвиг своего содержимого по заднему фронту этих импульсов. В результате на выходе Q7, а значит на выводе порта D, последовательно один за другим будут появляться биты передаваемого двоичного числа. Для безошибочной передачи информации по линиям последовательного порта в приёмный регистр эти данные должны записываться по переднему фронту импульсов CLK, так как именно этот фронт совпадает с середой битового интервала. Как уже говорилось ранее, DSP-порты предназначены для передачи данных между аналого-цифровыми или цифро-аналоговыми преобразователями и сигнальными процессорами. В качестве примера рассмотрим схему соединения между собой АЦП AD7890 и сигнального процессора TMS320C25. Упрощённая структурная схема соединения этих микросхем приведена на рисунке 12.2.12. 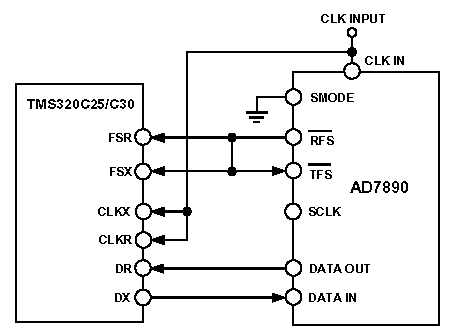 Рисунок 12.2.12. Упрощённая схема соединения микросхемы АЦП с последовательным выходом и сигнального процессора На этой схеме используется двунаправленный последовательный порт. Синхронизация всей схемы осуществляется от внешнего высокостабильного генератора импульсов (вход CLK INPUT). Так как порт двунаправленный, то есть два сигнала кадровой синхронизации: RFS - сигнал кадровой синхронизации приёмника и TFS - сигнал кадровой синхронизации передатчика. У сигнального процессора им соответствуют два вывода кадровой синхронизации: FSR - сигнал кадровой синхронизации приёмника и FSX - сигнал кадровой синхронизации передатчика. В приведенной на рисунке 12.2.12 схеме используется одна и та же скорость передачи данных, как в приёмнике, так и в передатчике. Поэтому все выводы кадровой синхронизации соединены между собой и все синхронизируются от сигнала кадровой синхронизации, формируемого микросхемой AD7890 на выводе RFS. В качестве сигнала тактовой синхронизации последовательного порта используется сигнал внешнего генератора опорной частоты. Он подаётся на входы тактовой синхронизации сигнального процессора как приёмника CLKR, так и передатчика CLKT. Выводы передачи данных соединены соответственно своему назначению, вывод передатчика АЦП DATA OUT соединён с входом приёмника сигнального процессора DR, а вывод передатчика сигнального процессора DT соединён с входом приёмника АЦП DATA IN. Глава 5 SPI-портыКроме задачи передачи непрерывного потока информации достаточно часто требуется передавать отдельные цифровые пакеты или управляющие команды. Эти пакеты могут передаваться достаточно редко. Именно для передачи такого вида информации и предназначен синхронный последовательный интерфейс (SPI). В синхронном последовательном интерфейсе SPI кадровые синхронизирующие импульсы не передаются постоянно. Это не нужно. Они присутствуют только в момент передачи команды. Соответственно меняется и их название. В SPI интерфейсе сигнал кадровой синхронизации называется выбор ведомого (slave select - SS). Временные диаграммы сигналов на выводах этого порта приведены на рисунке 12.2.13. 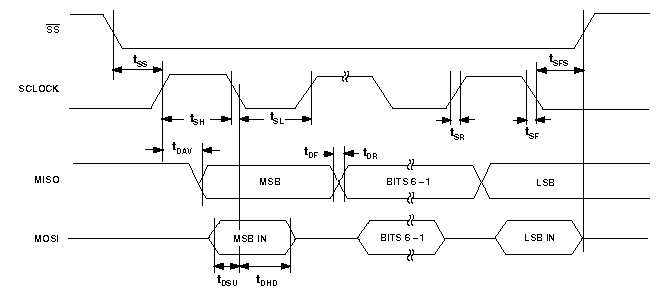 Рисунок 12.2.13. Временные диаграммы сигналов на выводах синхронного последовательного интерфейса SPI Как видно из приведённых временных диаграмм, сигнал кадровой синхронизации накрывает весь промежуток времени, предназначенный для обмена информацией. Он как бы разрешает этот обмен. Отсюда и его название. Сигнал тактовой синхронизации в этом интерфейсе используется один как для передатчика, так и для приёмника. Это позволяет экономить внешние выводы микросхемы. Для того чтобы не запутаться какой вывод передачи последовательных данных с каким соединять эта информация включена в название выводов. Название MISO обозначает вход главного устройства выход подчинённого (master input — slave output), а название MOSI обозначает выход главного и вход подчинённого устройства (master output — slave input). В качестве главного устройства в этом интерфейсе обычно используется микроконтроллер, реже сигнальный процессор. Рассмотрим схему цифрового устройства, которая может реализовать обмен данными по интерфейсу SPI. Пример такой схемы приведён на рисунке 12.2.14 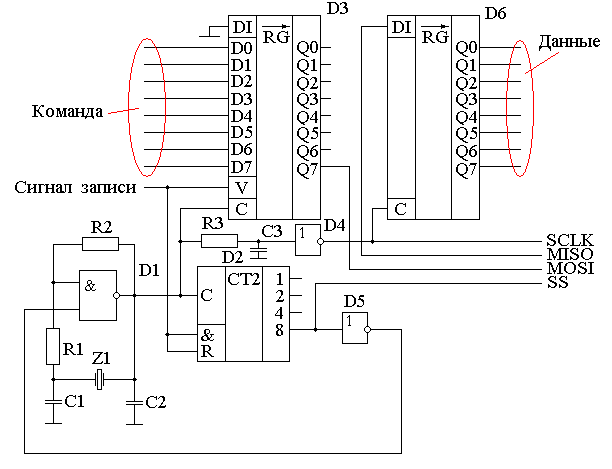 Рисунок 12.2.14 Схема master SPI-порта В этой схеме для передачи и приёма последовательных данных используются сдвиговые регистры D3 и D6. Так как синхроимпульсы SPI порта, в отличие от синхросигнала аналого-цифрового или цифро-аналогового преобразователей, используются только для синхронизации передачи данных, то требования к задающему генератору меньше. В результате для формирования синхронизирующего сигнала можно использовать встроенный кварцевый генератор (кварцевый резонатор, естественно, будет подключаться к внешним выводам микросхемы). Кварцевый генератор в схеме, приведенной на рисунке 12.2.14, построен на логическом элементе "2И-НЕ". Это позволяет останавливать и вновь запускать этот генератор. Для формирования сигнала выбора ведомого SS и для подсчёта необходимого количества импульсов синхронизации (в нашем случае восьми) служит двоичный счётчик D2. Рассмотрим работу схемы формирования сигнала выбора ведомого подробнее. В исходном состоянии в двоичном счётчике записано число 10002. При этом на выводе SS и на выходе логического элемента D1 присутствует высокий потенциал. При параллельной записи данных в регистр передачи D3 импульс записи одновременно подаётся на вход обнуления счётчика D2. В результате на выводе SS появляется низкий потенциал. Это означает, что SPI интерфейс начинает передачу данных. Одновременно снимается запрещающий потенциал с логического элемента D1 "2И-НЕ". При этом на обоих входах этого элемента появляется единичный потенциал. В результате на выходе этого элемента появится нулевой потенциал и возникнут условия для самовозбуждения генератора. Временные диаграммы на входе и выходах счетчика D2 приведены на рисунке 12.2.15 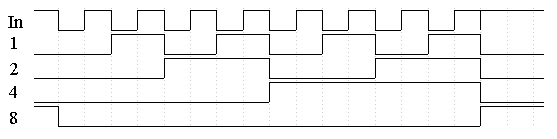 Рисунок 12.2.15. Временные диаграммы схемы формирования сигнала выбора подчиненного SS Импульсы поступают на вход последовательной синхронизации сдвигового регистра D3 и вход счётчика D2. После поступления на вход схемы D3 восьмого импульса передача данных в последовательном виде завершается, а в счётчике D2 оказывается записанным число 8. В двоичном виде оно равно значению 10002, а значит, на выводе SS вновь появится высокий потенциал, означающий завершение передачи данных по синхронному последовательному интерфейсу SPI. Так как этот же сигнал через инвертор подаётся на вход логического элемента D1, то на его выходе появится единичный потенциал, и условия генерации сорвутся. Генератор больше не будет вырабатывать импульсы, а значит, двоичный счётчик останется в состоянии 10002 до прихода следующего импульса записи в SPI порт. Интегрирующая цепочка R3C3 используется для подавления короткого импульса в конце формирования сигнала SS, а инвертор D4 позволяет осуществлять запись в сдвиговый регистр D6 по заднему фронту сигнала тактовой синхронизации. В результате подчиненное устройство может успеть подготовить очередной бит передаваемых данных. Мы рассмотрели схему SPI интерфейса со стороны главного устройства. Схема подчиненного устройства намного проще. Она может быть построена на обыкновенном сдвиговом регистре, как это показано на рисунке 12.2.16. 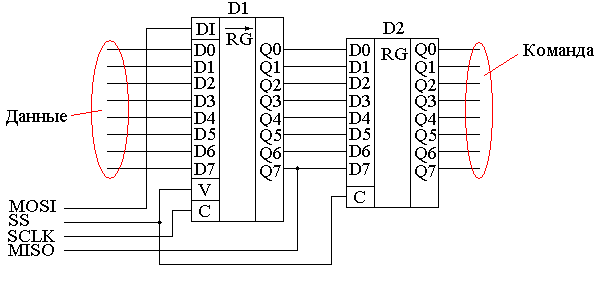 Рисунок 12.2.16. Схема подчиненного SPI-порта |