Диссертация на соискание ученой степени кандидата технических наук Владимирский государственный университет
 Скачать 6.36 Mb. Скачать 6.36 Mb.
|

|
3.6 Методы отладки АСУ ТП «ПХВ-1» В настоящее время существует множество методов отладки и диагностирования АСУ ТП. Все они подразделяются на два основных типа: статический; динамический. Статический метод характеризуется выработкой определенных требований к сервисной аппаратуре и стендам, которые включают входной контроль источников питания, модулей цифрового и аналогового ввода-вывода, а также подбор аппаратуры для контроля и испытаний. Кроме того, разрабатываются информационно-измерительные системы для автоматизации испытаний (Рисунок 3.15). Динамический метод включает комплексную отладку системы и отладку алгоритмов работы системы. Динамический метод, с точки зрения метрологии, не является точностным методом, однако он может обеспечивать полную нагруженность системы переменными, работающими в реальном масштабе времени, задавать сложные специализированные алгоритмы и таким образом максимально имитировать работу системы, приближая получение реальных рабочих характеристик. Именно поэтому в данной главе уделено наибольшее внимание отладке АСУ ТП в динамическом режиме. Для контроля работоспособности аппаратуры и комплексной отладки программно-технического комплекса «ПХВ-1» в рамках разработки проекта системы автоматизации производства бумвинила «ПХВ-1» были использованы оба метода отладки и диагностирования комплекса АСУ ТП. 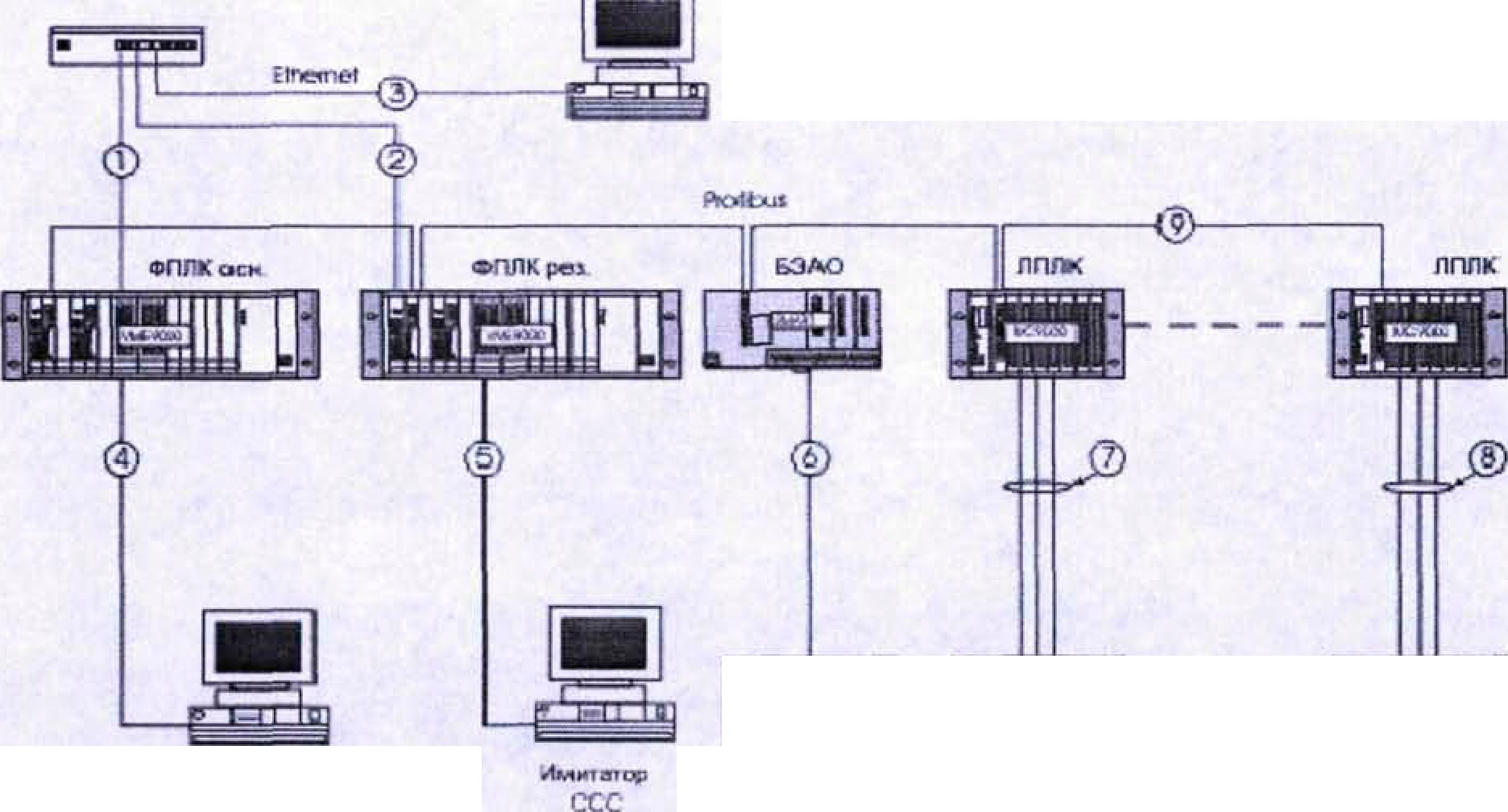
Имитатор обьек-та Иикгатор ССС Рисунок 3.15- Схема соединений отладочного комплекса «ПХВ-1» ИЛ -248 FADI3 На Рисуике 3.16 и Рисунке 3.17 представлены схемы статической и динамической отладки входных-выходных сигналов телесигнализации, телеизмерений и управления. (ТС, ТИ, ТУ). Note hock Rs-гзг X F DIN FDOUT FREL FADC FDACKaiuifipaiop 81-13 Магазин со прошила нии ИСИМТВ1НП1+.ЫИ с ne na tEft ffttif »<№ ilrfi 'M'l «u» Л 1.1,0».! 4LÏU1, nuKmim Wl Рисунок 3.16 - Схема статической отладки входных-выходных сигналов ТС, ТИ и Т У 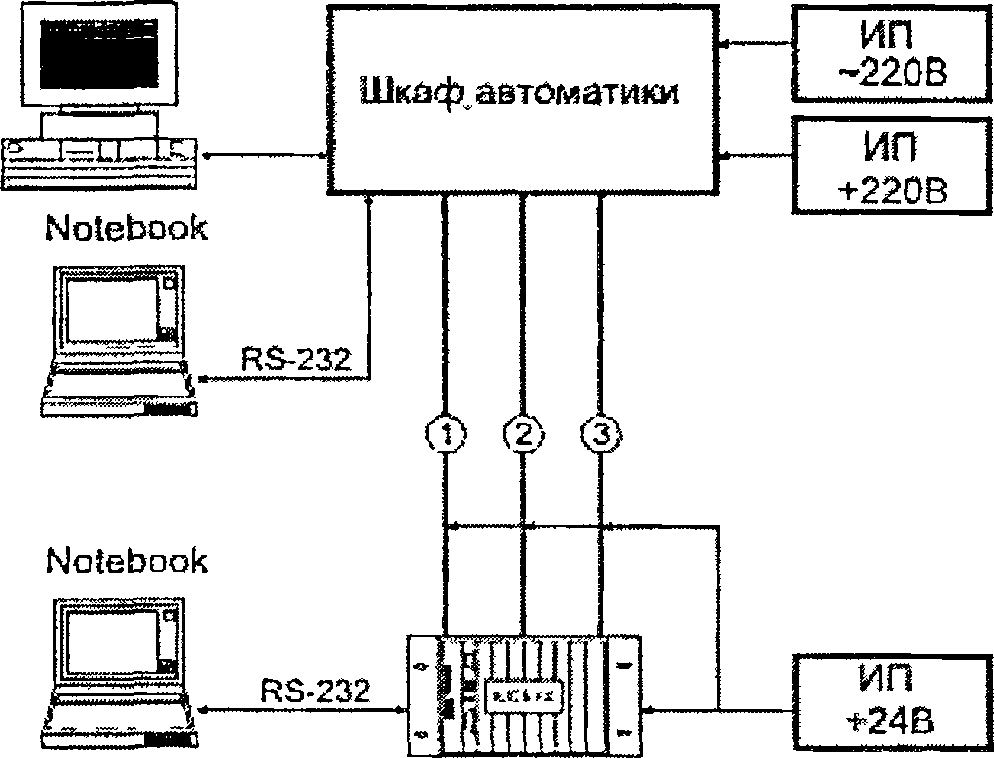 Имитатор объекта ПрКМ0Ч<1Н»1в" - кабель С-1А2 - кабель С-Ю2 - ибиль С-103 Рисунок 3.17 - Схема динамической отладки входных-выходных сигналов ТС, ТИ и ТУ 3.6.1 Отладка алгоритмов работы системы Для отладки отдельных алгоритмов работы программного обеспечения на входы модулей ввода подаются сигналы, имитирующие поведение объекта. Преимуществом рекомендованного автором метода моделирования НСД и мер защиты от него, а также других нештатных ситуаций, с помощью контроллеров-имитаторов и задач-имитаторов из штатного ПТК, является простота подготовительных операций. Подготовительные операции заключаются в изготовлении кабелей-переходников для передачи аналоговых сигналов от ЦАП к АЦП и от модулей цифрового вывода к модулям цифрового ввода (с подключением внешнего источника питания). На Рисунке 3.18 дана блок- схема специализированного алгоритма управления краном, реализованная при отладке комплекса «ПХВ-1» с помощью имитатора объекта. 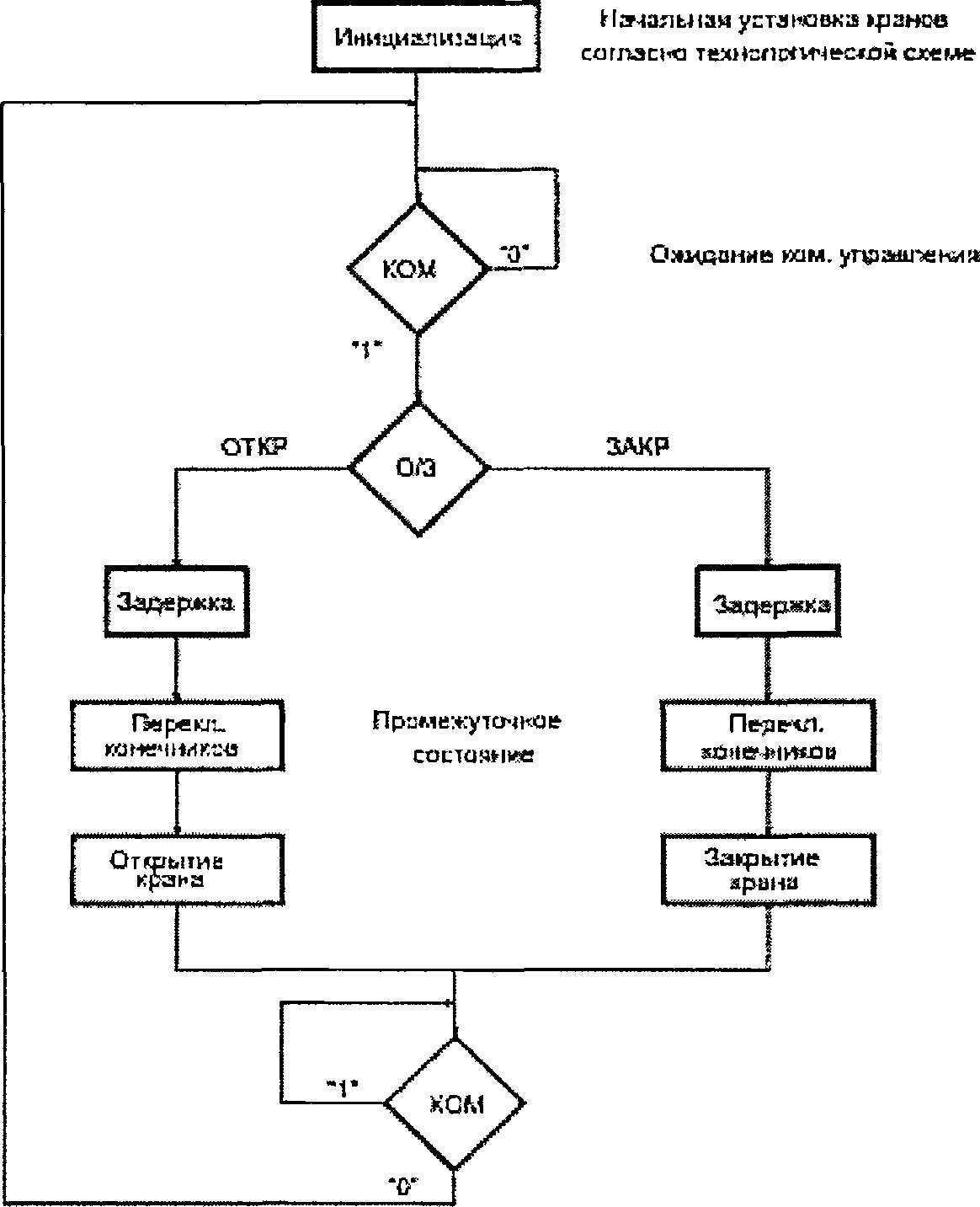 Рисунок 3.18 - Блок-схема алгоритма управления краном 3.6.2 Имитаторы Для комплексной отладки системы необходимо иметь ряд аппаратных и программных имитаторов объектов. Имитатор объекта комплекса в составе комплекса «ПХВ-1» (Рисунок 3.14) является программно-аппаратным средством диагностики и отладки контроллеров PEP типа IUC, VME, SMART, а также шкафов автоматики на базе данных контроллеров. Имитатор выполняет следующие функции: контроль дискретных выходных сигналов; формирование дискретных входных сигналов; формирование циклических аналоговых сигналов; формирование пошагового режима аналоговых сигналов; выполнение алгоритма управления кранами; выполнение специализированных алгоритмов для отладки объектов. Имитатор имеет информационную емкость по параметрам: количество каналов дискретных входов (ТС) — 40; количество каналов дискретных выходов (ТУ) — 32; количество каналов аналоговых выходов (ТИ) — 16. Имитатор может работать в следующих режимах: диагностика модулей; контрольно-измерительный; специализированные алгоритмы. Режим диагностики используется при проверке модулей УСО. Контрольно-измерительный режим применяется для отладки модулей УСО в составе контроллеров PEP или контрольно-измерительных каналов (КИК) в составе шкафа автоматики на базе контроллеров УСО. В данном режиме возможно формирование как статических, так и динамических аналоговых и дискретных сигналов в циклическом и пошаговом режиме, а также контроль и индикация входных дискретных сигналов. Специализированные алгоритмы (например, управление кранами) применяются при комплексной отладке системы. Имитатор может использоваться на трех уровнях архитектуры контроллерного оборудования: уровень системной шины — программный имитатор; уровень модулей УСО — программно-аппаратный имитатор; уровень входных клеммников шкафа автоматики — программно- аппаратный имитатор. На уровне 1 в контроллер загружается программа-имитатор объекта. На данном уровне производится проверка базового и прикладного программного обеспечения контроллера. На уровнях 2, 3 используется внешний имитатор, построенный на базе контроллера IUC9000. На уровне 2 выходы модулей УСО имитатора соединяются с входами модулей УСО контроллеров VME/IUC специализированными кабелями. На 10 4 данном уровне производится проверка базового и прикладного программного обеспечения контроллера вместе с модулями УСО. На уровне 3 выходы модулей УСО имитатора соединяются с входными клеммниками шкафа автоматики специализированными кабелями при комплексной отладке системы. На данном уровне производится проверка базового и прикладного программного обеспечения контроллера, включая модули УСО и весь аппаратный интерфейс шкафа автоматики. На Рисунке 3.19 и Рисунке 3.20 представлены схемы подключения имитатора к контроллеру на уровнях 2 и 3, Notebook Notebook ЛПЯК
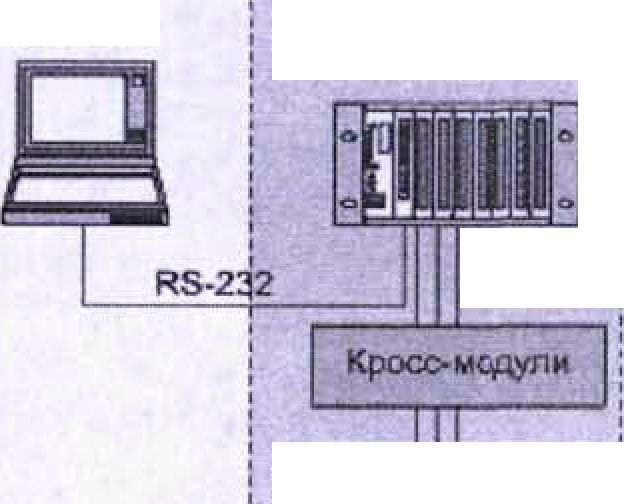 Рисунок 3.19 - Подключение имитатора к контроллеру Notebook Шкаф автоматики ЛПЛК IUC9000 I Входной клгммнж ] I ---jjf-—' Li Имитатор объекта Notebook  ]Ш ИД IUC9000 RS-232 C-IA2 C-ID 2 C-ID3 Рисунок 3.20 - Подключение имитатора к комплексу На Рисунке 3.21 дана типовая схема соединений кабелей имитатора объекта для стенда АСУ ТП производства бумвинила «ПХВ-1» . 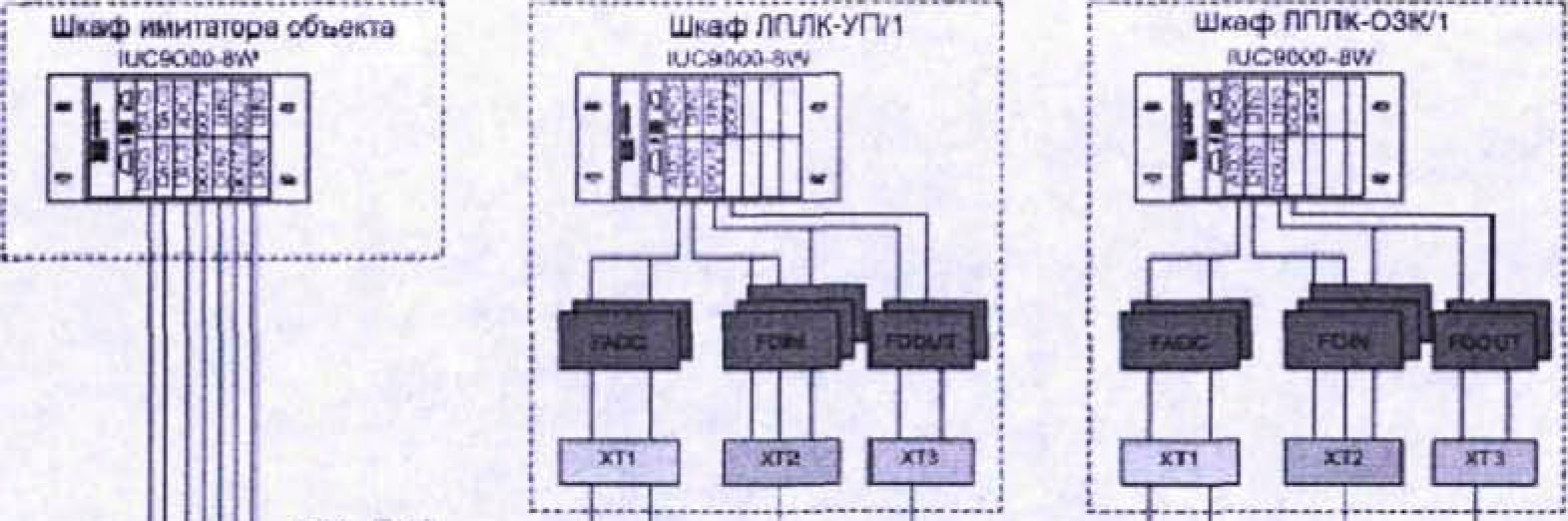 : пт: j rv-:fl. F-НУ! ¡'Г *?, ► сцрл (У r^ i <:*' ■ n . . 1 Ык2 . Рисунок 3.21 - Схема соединений кабелей имитатора объекта для стенда АСУТП «ПХВ-1» Формирование контрольно-измерительных сигналов (КИС) производится с помощью приложения ISaGRAF и других графических приложений, например, в среде Builder 4. Формирование контрольно-измерительных сигналов (КИС) производится с помощью приложения ISaGRAF и других графических приложений, например, в среде Builder 4. Графическое представление программы-имитатора возможно в графических приложениях с помощью трех типов изображений: мнемосхема; табличная схема; символьная схема. Пример приложения имитатора в табличной форме представлен на Рисунке 3.22.
| ||||||||||||||||||||||||||||||||||||