Федеральное государственное бюджетное образовательное учреждение высшего образования московский авиационный институт
 Скачать 0.92 Mb. Скачать 0.92 Mb.
|

|
1.2. Радиоэлектронное подавление активными радиопомехами РЛС с внутриимпульсной модуляцией РЛС с ЛЧМ-сигналом [4]. Недостаток импульсных РЛС с простыми сигналами – при фиксированном значении импульсной мощности передатчика увеличить дальность действия возможно только за счет увеличения длительности зондирующих радиосигналов. Но при этом ухудшается разрешающая способность РЛС по дальности ( Выход – в использовании РЛС со сложными сигналами. Нашли применение импульсные РЛС с ЛЧМ и фазоманипулированными (фазокодоманипулированными – ФКМ) сигналами. Общим для указанных РЛС является то, что принимаемые отраженные сигналы от целей подвергаются свертке (сжатию) и последующей когерентной обработке. Так как структуры сигналов различны, то и "процедуры" сжатия и обработки сигналов в этих РЛС имеют особенности. В связи с этим имеет особенности и радиоэлектронное подавление РЛС с ЛЧМ и РЛС с ФКМ - сигналами. В РЛС с ЛЧМ-сигналами (рис. 4) излучается периодическая последовательность радиоимпульсов достаточно большой длительности  , ,  Рис. 4. ЛЧМ-сигнал  а б Рис. 5. Графики, поясняющие принцип действия РЛС с ЛЧМ-сигналами: а – закон изменения частоты радиоимпульсов; б – дисперсионная характеристика линии задержки устройства обработки сигналов Обработка сигналов, отраженных от целей, осуществляется корреляционным приемником или согласованным фильтром. В качестве согласованного фильтра используется дисперсионная линия задержки, время запаздывания сигнала в которой зависит от частоты радиоимпульса (рис. 5, б). Более низкие мгновенные частоты радиоимпульса задерживаются на большее время по сравнению с высокими частотами. Вследствие этого на выходе дисперсионной линии задержки получается укороченный (сжатый) радиоимпульс, длительность которого в Bраз меньше длительности излучаемого радиосигнала. Если дисперсионная линия задержки не имеет потерь, то справедливо равенство В этом случае Для радиоэлектронного подавления РЛС с ЛЧМ могут применяться активные маскирующие или имитирующие радиопомехи. В качестве маскирующих используются непрерывные шумовые радиопомехи. Для этого вида помехового сигнала характерно то, что изменения его мгновенной частоты происходят по случайному закону. Вследствие этого мощность помехового сигнала при прохождении через дисперсионную линию задержки не изменяется. А так как мощность полезного сигнала увеличивается в В раз, то коэффициент подавления РЛС с ЛЧМ - сигналами при использовании непрерывных шумовых помех в В раз больше, чем при подавлении импульсных РЛС с простыми сигналами (при равенстве импульсных мощностей передатчиков РЛС). Имитирующие радиопомехи могут создаваться путем ретрансляции (переизлучения) сигналов РЛС с задержкой по времени, либо путем смещения частоты несущей, либо путем дополнительной модуляции сигналов по амплитуде или частоте. Рассмотрим прохождение таких радиопомех через приемник РЛС. Радиопомеха, создаваемая путем переизлучения сигналов РЛС с задержкой по времени, проходит через дисперсионную линию задержки точно так же, как и полезный сигнал. Если передатчик помех расположен на прикрываемом самолете (цели), то вначале на выходе дисперсионной линии задержки появится сжатый по времени отраженный сигнал, а затем помеховый сигнал. Временная задержка помехового сигнала определяется временем задержки полезного сигнала в ретрансляторе. Изменение несущей частоты помехового сигнала в ретрансляторе на величину Fр в диапазоне возможных доплеровских частот приводит к тому, что помеховый сигнал эквивалентен отраженному с доплеровской частотой Fд= Fр. При увеличении или уменьшении частоты несущей в ретрансляторе помеховый сигнал на выходе дисперсионной линии задержки может оказаться слева или справа от полезного сигнала на временной оси. Это обстоятельство позволяет создавать опережающую ответную помеху по дальности. Модуляция амплитуды ретранслированного сигнала шумом приводит к образованию большого числа ложных отметок. Воздействие такой помехи эквивалентно воздействию "белого" шума. При синхронизации модулирующего напряжения ретранслятора сигналом РЛС такая помеха является более эффективной, чем "белый" шум, так как оказывается коррелированной с сигналом. В РЛС с ФКМ-сигналами [4] излучается последовательность радиоимпульсов (рис. 38,в) длительностью 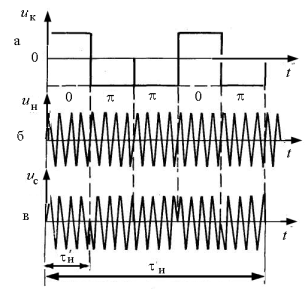 Рис. 6. К пояснению принципа действия РЛС с ФКМ-сигналами: мгновенные значения модулирующего сигнала (а), несущего колебания (б), ФКМ-радиосигнала (в) Закон изменения фазы несущего колебания показан на рис. 38,а. В приемнике с помощью дешифратора принятые отраженные импульсные сигналы сжимаются по времени (длительности) в В раз. Возможная структурная схема дешифратора изображена на рис. 39. Дешифратор представляет собой линию задержки с отводами, отстоящими друг от друга на длительность  Рис. 7. Устройство сжатия сигналов РЛС с ФКМ-сигналами Следовательно, в рассматриваемой РЛС по отношению к РЛС с простым сигналом обеспечивается выигрыш в отношении сигнал/помеха по мощности в В раз, что потребует для ее подавления увеличения мощности передатчика радиопомех также в В раз. Коэффициент сжатия В в современных РЛС составляет сотни…тысячи. Коэффициент подавления рассмотренной РЛС при действии шумовых радиопомех, так же как в РЛС с ЛЧМ-сигналами, в В раз выше, чем в импульсных РЛС с простыми сигналами. Для подавления РЛС с ФКМ-сигналами кроме активных шумовых радиопомех также могут использоваться имитирующие радиопомехи, которые получают путем ретрансляции сигналов подавляемой РЛС. По аналогии с РЛС, использующей ЛЧМ-сигналы, в РЛС с ФКМ-сигналами можно ожидать эффективное действие радиопомех, создаваемых путем изменения фазы ретранслированного сигнала. Радиопомеха, создаваемая путем задержки ФКМ-сигнала по времени, будет проходить через дешифратор и создавать на выходе помеховый импульс, задержанный от отраженного сигнала на время задержки в ретрансляторе. Изменение частоты несущей на величину FP, значительно большую максимальной доплеровской частоты целей, приводит к созданию помех каналу измерения дальности. Смещенные по частоте помеховые сигналы создают помеховые импульсы, возникающие раньше и позже полезного сигнала. Передатчик ложных целей для РЛС с ЛЧМ. Цель имитационных помех – создать ложную информацию путем внутриимпульсной амплитудной и частотной модуляции ретранслируемого сигнала, приводящего к созданию ложных целей по дальности. Подверженность РЛС с ЛЧМ воздействию ретрансляционной помехи связана с тем, что отраженный сигнал от цели должен приниматься до того момента, как сформировался сжатый импульс. Добавление в ретранслируемый сигнал, например, частотного сдвига вызывает появление ложного импульса до или после отраженного (сжатого) от цели. Достижимый при этом диапазон ошибок по дальности ограничивается пространственной протяженностью рабочего импульса РЛС (до сжатия). Радиолокационный сигнал РЛС с ЛЧМ принимается приемной антенной передатчика, усиливается в СВЧ-усилителе, модулируется в нем по фазе с целью обеспечения сдвига по частоте на определенную величину, проходит амплитудный модулятор, где превращается из широкого импульса в серию узких импульсов, усиливается в усилителе мощности и излучается через передающую антенну. Синхронизация фазовой и амплитудной модуляции обеспечивается с помощью управляющих импульсов, формируемых специальным генератором, работа которого синхронизуется продетектированными импульсами РЛС. Управляющие импульсы представляют собой сигналы пилообразной формы, подаваемые на фазовый модулятор, и сигналы прямоугольной формы – для амплитудной модуляции. За счет изменения частоты амплитудной модуляции, полярности и преобразования частоты с помощью фазовой модуляции можно сформировать ложную цель, расположенную на большей или меньшей дальности относительно дальности до постановщика помех. Если отношение помеха-сигнал при этом достаточно велико, то истинная цель может подавляться в приемнике РЛС, и оператор РЛС будет наблюдать только ложную цель. Поскольку обработка сигналов в приемниках РЛС может быть различной, выбор параметров помеховой модуляции при формировании ложных целей должен осуществляться на основании экспериментальных исследований на аналогах РЛС противника или посредством моделирования. В ряде случаев представляется целесообразным излучать ложные сигналы описанной структуры одновременно с непрерывным шумом в пределах всей рабочей полосы частот. Если мощность шума достаточна, чтобы замаскировать действительный отраженный сигнал от цели, то в этом случае исключается возможность повторного захвата цели после срыва захвата, вызванного действием ложной частотной информации. Известно, что создание одиночных ложных целей на расстоянии порядка 1,5 км от прикрываемой цели, как правило, не препятствует запуску ракеты. Поэтому целесообразно создавать не менее двух ложных целей на различных дальностях и осуществлять по программе уводы строба дальности на эти ложные цели. В этом случае РЛС будет лишена возможности сопровождать по дальности движущуюся в пространстве цель, возникнут большие ошибки слежения по дальности. Один из методов защиты РЛС от имитационных помех рассмотренной структуры сводится к изменению закона модуляции частоты от импульса к импульсу. В этом случае передатчик ложных целей будет поочередно излучать помеховые импульсы, создающие то опережающие, то запаздывающие ложные цели. В результате на индикаторе РЛС будут наблюдаться импульсы, расположенные по обе стороны от полезного сигнала. При симметричном законе ЧМ - сигнала РЛС ложные цели будут равноотстоящими по временной оси от импульса цели. Это позволяет определять местоположение истинной цели как середины между положениями ложных целей и выставлять следящий строб дальности точно на место, где находится сигнал реальной цели. Против описанной помехозащиты можно применить помеху с одинаковым изменением частоты от импульса к импульсу, тогда на экране индикатора РЛС будет создаваться только одна ложная цель (не парная) или с двойным изменением частоты в каждом импульсе с использованием, например, балансного модулятора. В этом случае возможно совмещение импульсной помехи с отраженным от цели импульсом, и при достаточной мощности помехи может происходить подавление полезного сигнала в схеме АРУ или ограничителе. Имитирующие помехи РЛС с ЛЧМ сигналами могут создаваться путем ретрансляции сигналов РЛС с задержкой по времени. Такая помеха проходит фильтр сжатия точно так же, как и полезный сигнал. Если передатчик помех расположен на прикрываемом самолете, то вначале на выходе фильтра сжатия появится сжатый по длительности отраженный сигнал, а затем помеховый сигнал. Время задержки сжатого помехового сигнала относительно сжатого отраженного сигнала будет равно времени задержки помехового сигнала в ретрансляторе. Имитационная помеха может быть создана также путем амплитудной модуляции гармоническим колебанием ишумом. При амплитудной модуляции по гармоническому закону с частотой fм и глубиной т помеха состоит из составляющей на несущей частоте и двух боковых частот, отстоящих от несущей на величину ±fМ с амплитудой т/ Составляющая на несущей частоте будет ослаблять или усиливать действие отраженного сигнала в зависимости от фазового сдвига, поэтому ее стараются, подавлять при формировании помехи, две другие составляющие будут оказывать мешающее действие, аналогичное смещению частоты на величину ±fМ. Если при модуляции используется одновременно несколько гармонических составляющих, например п, то на выходе фильтра сжатия будет создаваться 2nдополнительных сигналов. Но в этом случае отраженный сигнал будет иметь амплитуду, превышающую амплитуду помеховых составляющих, и помеховый эффект при большом п будет незначительным. Амплитудная модуляция шумом приводит к образованию большого числа ложных отметок, воздействие такой помехи будет эквивалентно действию маскирующей шумовой помехи. Передатчик уводящих помех по дальности импульсной РЛС с ЛЧМ. Для создания уводящих помех по дальности обычным импульсным РЛС широкое распространение, как указывалось ранее, получил способ, основанный на применении устройства кратковременного запоминания частоты на основе рециркулятора радиоимпульсов. Однако применительно к подавлению РЛС с ЛЧМ этот способ не обеспечивает увод строба дальности РЛС с внутриимпульсной частотной модуляцией, потому что в рециркуляторе запоминается мгновенная частота передней части радиолокационного импульса выборки, которая не совпадает с частотой остальной части ЛЧМ - импульса. В результате этого в запомненном (рециркулированном) радиоимпульсе отсутствует главное изменение частоты. Другой недостаток этого способа при его использовании для создания уводящей помехи по дальности РЛС с ЛЧМ связан с несогласованностью длительности радиолокационного импульса (десятки микросекунд) с величиной задержки в рециркуляторе. В настоящее время в диапазоне СВЧ имеются линии задержки на 0,5 мкс с приемлемой величиной затухания для аппаратурной реализации. 2.РАСЧЕТ ПАРАМЕТРОВ РЛС Период импульса РЛС рассчитывается исходя из максимальной дальности цели Rmax. За время периода импульс должен достигнуть цели, отразиться от нее и вернуться до приемника РЛС. В противном случае, получим перекрывание входящих и исходящих импульсов. где Rmax – максимальное расстояние до цели, с – скорость света. Длительность импульса рассчитывается исходя из минимальной дальности цели. Время сигнала не должно превышать времени, которое проходит импульс до цели и обратно. где Rmin – минимальное расстояние до цели. Принимаем На рисунке 1 показана временная диаграмма распространения импульсов во времени. 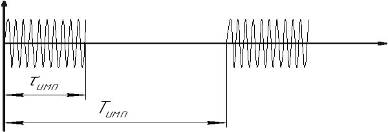 Рисунок 2.1- Временная диаграмма распространения импульсов Определение длины волны сигнала. Нижняя граница частоты сигнала определяется минимальным количеством длин волн в импульсе (100). где Отсюда находится верхняя граница длины волны: где  Так как линейный размер цели Отсюда минимальная частота излучения будет равна:  |