ДНГ. Исследование полученной модели 49
 Скачать 7.73 Mb. Скачать 7.73 Mb.
|

2.3. Проверка достоверности твердотельной моделиПроведём сравнение некоторых массовых характеристик модели с характеристиками реального образца прибора КИНД05-091 (таблица 2.1). Таблица 2.1. Сравнение характеристик модели и реального прибора
Анализируя данные таблицы 2.1 можно сделать вывод, что твердотельная модель достаточно точно (с погрешностью, не превышающей 9%) описывает реальный образец прибора. Это обстоятельство позволяет использовать построенную модель для дальнейшего исследования. 2.4. ЗаключениеВ рамках конструкторской части дипломной работы описана конструкция динамически настраиваемого гироскопа с газодинамической опорой ротора, и построена его твердотельная модель, дающая возможность определить массовые характеристики элементов конструкции, необходимые для исследования математической модели, которая описана в исследовательской части. Анализ показал, что по массово-инерционным характеристикам твердотельная модель соответствует реальному образцу динамически настраиваемого гироскопа с ошибкой, не превышающей 9 %. Эту ошибку можно уменьшить более тщательным подбором материалов элементов конструкции модели. 3. НАУЧНО-ИССЛЕДОВАТЕЛЬСКАЯ ЧАСТЬ Студент: __________________________ /Рословец П.В., ПС1-122/ 3.1. ВведениеИсследовательская часть дипломной работы посвящена построению и исследованию математической модели динамически настраиваемого гироскопа (ДНГ) с газодинамической опорой ротора (ГДО), учитывающей угловую податливость скоростной опоры. Жёсткость ГДО определяется состоянием газовой среды внутри прибора, а именно, её температурой и давлением, а также скоростью вращения вала ДНГ. Таким образом, при изменении одного или нескольких из этих параметров жёсткость ГДО также изменится, а следовательно изменится несущая способность ГДО и её собственная частота. В связи с этим стоит задача определения влияния угловой жёсткости скоростной опоры на другие параметры прибора и на его функционирование в целом. В ходе работы динамически настраиваемого гироскопа возникают вибрации на частотах, кратных частоте вращения маховика, вызванные неидеальностью изготовления и балансировки элементов конструкции. В случае, если одна из частот вибраций совпадёт с собственной частотой какого-либо элемента конструкции, возникнет резонанс, способный нарушить нормальное функционирование прибора. Поэтому одной из целей работы является определение собственной частоты ГДО и проверка возможности возникновения резонанса на этой частоте. 3.2. Принцип работы динамически настраиваемого гироскопа, работающего в режиме датчика угловой скоростиНа рис. 3.1 представлена кинематическая схема динамически настраиваемого гироскопа с газодинамической опорой ротора, работающего в режиме датчика угловой скорости (ДУС). 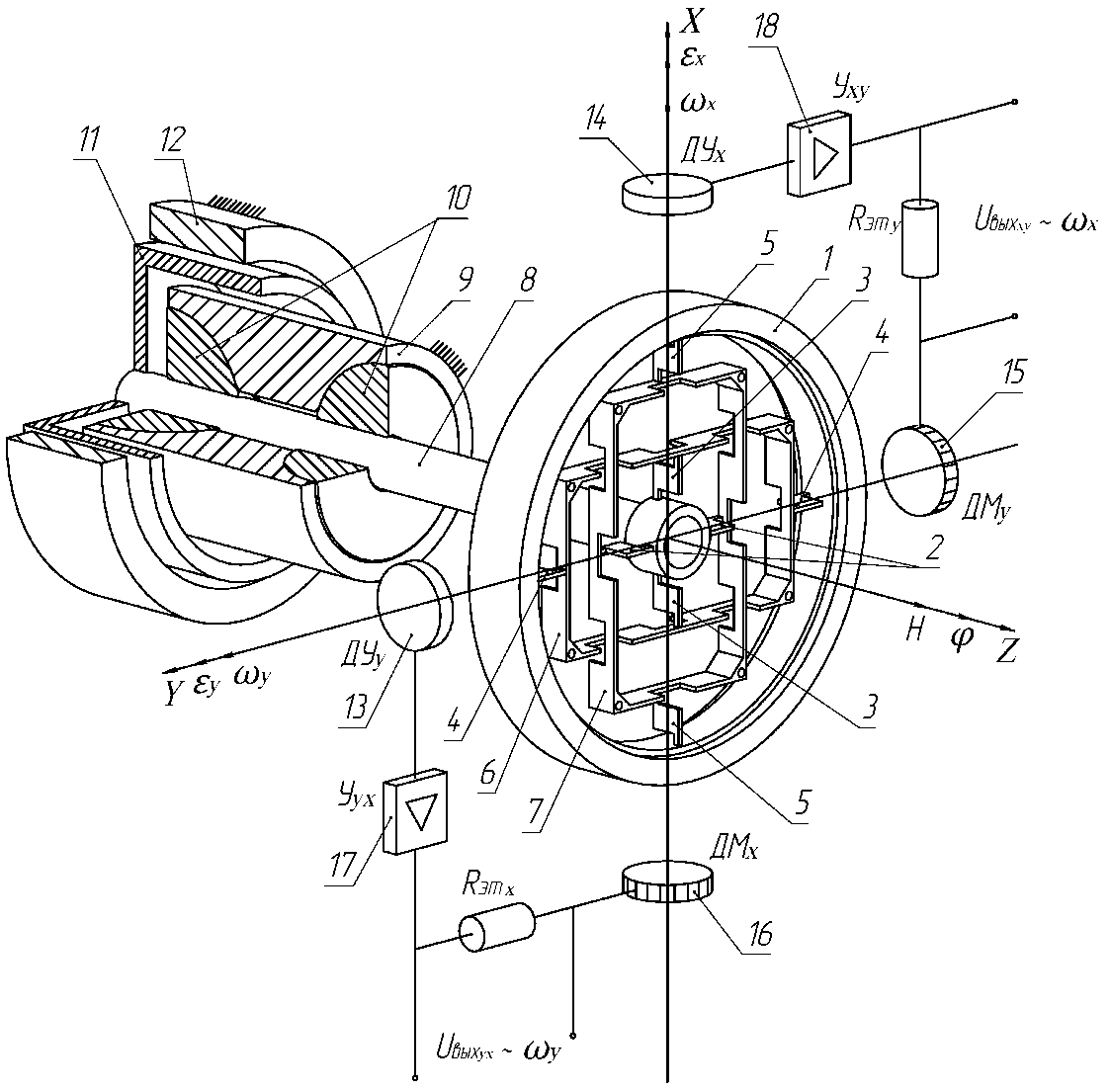 Рис. 3.1. Кинематическая схема ДНГ с ГДО, работающего в режиме ДУС:
В соответствии с кинематической схемой (рис. 3.1), основным элементом ДНГ является ротор 1, подвешенный с помощью упругих перемычек 2, 3 и 4, 5 и внутренних колец (рамок) 6 и 7 на вращающемся от привода (11, 12) валу 8. Скоростная газодинамическая опора служит для кинематической связи вращающейся и неподвижной частей прибора и состоит из втулки 9 и двух полусфер 10. Каждый из двух каналов перекрёстной обратной связи содержит датчик угла (ДУ) (13, 14), усилитель обратной связи (УОС) (17, 18) и датчик момента (ДМ) (15, 16). ДУ фиксируют угловое отклонение маховика относительно корпуса, а ДМ прикладывают к маховику гироскопа управляющие моменты. Упругий подвес обладает сравнительно малой угловой жёсткостью, препятствующей повороту вокруг осей карданова подвеса, и имеет большую жёсткость на изгиб в плоскости, перпендикулярной оси вращения вала. Применение упругого подвеса с двумя промежуточными кольцами, соединёнными параллельно, позволяет снизить угловую вибрацию маховика на частоте его вращения. Отклонение плоскости вращения маховика ДНГ от плоскости, перпендикулярной валу, вызывает появление пропорциональных этому угловому отклонению моментов, действующих со стороны карданного подвеса на маховик: упругого момента, и направленного противоположно ему опрокидывающего (антиупругого) момента. Условие компенсации этих моментов и представляет собой условие динамической настройки. Для двухкольцевого ДНГ (прецессионного типа) его можно записать в следующем виде: (A1 + B1 – C1)∙Ω2 – k = 0, где A1, B1, C1 – экваториальные и осевой моменты инерции кольца; Ω – угловая скорость вращения вала; k – угловая жёсткость торсионов. Из условия динамической настройки следует, что при определённой скорости вращения ротора подвес приобретает свойства, близкие к свойствам безмоментного шарнира. Таким образом, при малых углах отклонения маховика ДНГ ведёт себя как трёхстепенный свободный гироскоп. ДУС на ДНГ имеет два измерительных канала и две оси чувствительности и измеряет проекции вектора переносной угловой скорости основания на эти оси. При наличии переносной угловой скорости основания по одной из осей чувствительности прибора, его корпус движется вместе с основанием, в то время как маховик сохраняет своё положение относительно инерциального пространства неизменным. При этом датчик угла фиксирует по этой оси нарастающий угол рассогласования, и сигнал с него, проходя через усилитель обратной связи, подаётся на датчик момента, который создаёт момент вокруг другой оси чувствительности, вызывая тем самым прецессию маховика, который начинает поворачиваться вслед за корпусом с угловой скоростью равной переносной, стремясь минимизировать угол рассогласования. В этом случае ток, протекающий в обмотке датчика момента, пропорционален переносной угловой скорости и измеряется через напряжение, падающее на эталонном резисторе. |