ТОК Лекции. Конспект лекций Самара Самарский государственный технический университет 2011
 Скачать 6.93 Mb. Скачать 6.93 Mb.
|

|
Помехи – случайные воздействия, искажающие полезный сигнал. Линейные искажения – искажения сигнала, не сопровождающиеся появлением частотных составляющих в его спектре. Нелинейные искажения – искажения сигнала, сопровождающиеся появлением в его спектре новых гармонических составляющих. Достоверность – степень соответствия принятой информации переданной. Помехоустойчивость – способность системы правильно принимать информацию, несмотря на воздействие помех. Трансформация телемеханического сообщения – необнаруженное изменение телемеханического сообщения, возникшее в процессе его передачи под воздействием помех и приводящее к приему ложного сигнала. Потенциальная помехоустойчивость – предельно допустимая помехоустойчивость, которая может быть обеспечена идеальным приемником. Передача с повторением – это передача одного и того же сообщения несколько раз, запоминание принятых сообщений, сравнение их и составление сообщения из элементов, выбранных по принципу большинства. Передача с обратной связью – это передача основного сообщения по прямому каналу, дополненная передачей вспомогательного сообщения по обратному каналу, характеризующего процесс передачи основного сообщения. Передача с информационной обратной связью – это передача с обратной связью, при которой ошибка определяется на передающей стороне. Передача с решающей обратной связью – это передача с обратной связью, при которой ошибка определяется на приемной стороне. КОНТРОЛЬНЫЕ ВОПРОСЫ
13. Составьте структурную схему, реализующую алгоритм передачи с решающей обратной связью. 8. ПРИНЦИПЫ ПОСТРОЕНИЯ ТЕЛЕМЕХАНИЧЕСКИХ СИСТЕМ Из четырёх основных телемеханических функций (телеуправление, телесигнализация, телеизмерение и телерегулирование) телеизмерение (ТИ) и телерегулирование (ТР) являются наиболее сложными, что обусловлено требованием передачи информации с заданной точностью [10]. Принципы построения телемеханических систем рассмотрим на примере системы телеизмерения. 8.1. ХАРАКТЕРИСТИКИ СИСТЕМ ТЕЛЕИЗМЕРЕНИЯ Телеизмерение – получение информации о значениях измеряемых параметров контролируемых или управляемых объектов методами и средствами телемеханики (ГОСТ 26.005-82). В том же ГОСТе даются определения следующих понятий. Телеизмерение по вызову – телеизмерение по команде, посылаемой с пункта управления на контролируемый пункт и вызывающей подключение на контролируемом пункте передающих устройств, а на пункте управления – соответствующих приемных устройств. Телеизмерение по вызову позволяет использовать одну линию связи (канал телеизмерения) для поочередного наблюдения за многими объектами телеизмерения. Оператор с помощью особой системы телеуправления может подключать к каналу телеизмерения желаемый объект телеизмерения или применять автоматический опрос объектов телеизмерения циклически по заданной программе. Телеизмерение по выбору – телеизмерение путем подключения к устройствам пункта управления соответствующих приемных приборов при постоянно подключенных передающих устройствах на контролируемых пунктах. Телеизмерение текущих значений (ТИТ) – получение информации о значении измеряемого параметра в момент опроса устройством телемеханики. Телеизмерение интегральных значений (ТИИ) – получение информации об интегральных значениях измеряемых величин, проинтегрированных по заданному параметру, например, времени, в месте передачи. Сущность телеизмерения заключается в том, что измеряемая величина, предварительно преобразованная в ток или напряжение, дополнительно преобразуется в сигнал, который затем передается по линии связи. Таким образом, передается не сама измеряемая величина, а эквивалентный ей сигнал, параметры которого выбирают так, чтобы искажения при передаче были минимальными. Совокупность технических средств, необходимых для осуществления телеизмерений называют системой телеизмерения (СТИ). Главное требование, предъявляемое к СТИ, заключается в том, что она должна обеспечить заданную точность. Поэтому основной характеристикой СТИ является точность. Точность характеризуется статической погрешностью или просто погрешностью. Погрешность – степень приближения показаний приемного прибора к действительному значению измеряемой величины. Погрешность телеизмерения определяют как максимальную разность между показаниями выходного индикатора на приемной стороне и действительным значением телеизмеряемой величины. Согласно ГОСТ 26.205-83 классы точности каналов телеизмерения должны быть установлены для устройств и комплексов при цифровом и аналоговом воспроизведении измеряемых параметров из следующего ряда: 0,15; 0,25; 0,4; 0,6; 1,0; 1,5; 2,5. Абсолютная основная погрешность канала телеизмерения – наибольшая разность выходной величины, приведенной к входной в соответствии с градуировочной характеристикой, и входной величины: Δ= y – x, (8.1) где Δ – абсолютная погрешность, y– выходная величина, приведённая ко входной, x – входная величина. Относительная погрешность d' – отношение абсолютной погрешности к действительному значению измеряемой величины, выраженное в процентах. Приведенная погрешность d – отношение абсолютной погрешности к величине диапазона шкалы измерений (Xmax – Xmin): d = Δ/(Xmax – Xmin). (8.2) Абсолютная дополнительная погрешность канала телеизмерения устройства – наибольшая разность значений входной (выходной) величины при нормальных условиях и при воздействии влияющего фактора (ГОСТ 26.205-83). Дополнительные погрешности вызываются различными отклонениями от нормальных условий работы, например, изменением температуры окружающей среды, изменением напряжения питания за допустимые пределы, появлением помех, внешних магнитных полей и т.п. Телеизмеряемые величины необходимо воспроизводить на индикаторах в абсолютных значениях измеряемых величин. Это значит, что если передаваемая величина выражается в тоннах, то несмотря на все промежуточные преобразования этой величины, неизбежные при передаче, индикатор на приемной стороне должен отображать её в тоннах. Лишь в особых случаях допускается воспроизведение телеизмерений в процентах. Системы телеизмерения (СТИ) можно классифицировать по различным признакам. Наиболее распространена классификация по параметру, т.е. методам, с помощью которых передается значение измеряемой величины по линии связи. Современные системы телемеханики в целом и системы телеизмерений в частности являются цифровыми, обеспечивающими наибольшую точность и помехоустойчивость передачи. В них по линии связи передаются сигналы, которые соответствуют кодовым комбинациям, отображающим определенное значение передаваемого сообщения. Системы телеизмерения можно классифицировать также по виду программы, по которой они работают. Подавляющее большинство СТИ работают по жесткой циклической программе, когда передаются все измеряемые сообщения независимо от того, несут они информацию получателю или нет. Недостатком таких систем является пониженная пропускная способность. Для её повышения можно применить адаптивные телеизмерительные системы, автоматически изменяющие программу работы в зависимости от изменения характеристик передаваемых сигналов и внешних условий. 8.2. ЦИФРОВЫЕ СИСТЕМЫ ТЕЛЕИЗМЕРЕНИЙ Основным достоинством цифровых или кодоимпульсных систем ТИ является отсутствие принципиальных ограничений для повышения точности телеизмерения благодаря дискретному характеру сигналов. Эти системы легко реализуются на современной технической базе. Цифровые или кодоимпульсные системы ТИ отличает дискретная структура сигнала у, подаваемого в линию или в канал связи, не имеющая линейной зависимости от измеряемой величины. Сигнал, отображающий значение измеряемой величины, в цифровых системах ТИ представляет собой кодовую комбинацию одного из используемых кодов. На рис. 8.1 приведена структурная схема устройства контролируемого пункта, отображающая работу многоканальной цифровой системы ТИ. Измеряемые величины D1, …, DN через соответствующие датчики Д1, …, ДN с унифицированным выходным сигналом Dx1(t), …, DxN(t) поступает на вход аналоговых коммутирующих ключей Кл1, …,КлN, которые управляются коммутатором каналов Кк. Последний работает в циклическом режиме, переключаясь по окончании передачи очередного телеизмерения. Коммутатор Кк и ключи Кл образуют измерительные каналы, формируемые по принципу временного разделения, что позволяет одновременно с передачей осуществлять дискретизацию функции Х(t) по времени. Преобразование дискретных отсчетов в код происходит в следующем блоке цифровой системы ТИ – в аналого-цифровом преобразователе (АЦП), в выходном регистре RG которого формируется цифровой код текущего значения телеизмеряемой величины D. 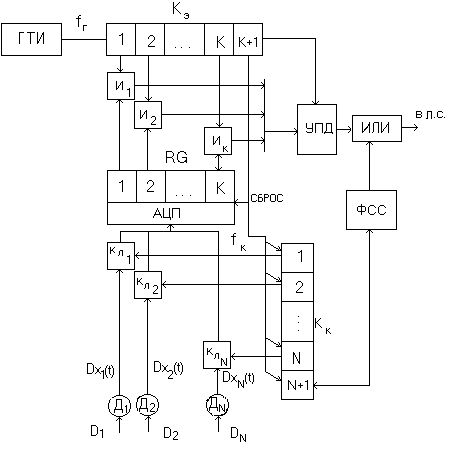 Рис. 8.1. Структурная схема устройства контролируемого телемеханического пункта С выходного регистра RG АЦП код считывается и передаётся в канал связи через устройство повышения достоверности передачи информации (УПД). Считывание цифрового эквивалента с RG и выдача его в канал связи производится в последовательном коде, для реализации которого в структуру системы вводится коммутатор Кэ и схемы совпадения схемы И1, …, Ик. Частота fг переключения Кэ задаётся генератором тактовых импульсов (ГТИ). Через схемы И1, …, Ик код из RG АЦП поступает в УПД, в котором реализуется один из известных алгоритмов кодирования сообщения принятым помехоустойчивым кодом. Из структурной схемы цифровой системы ТИ видно, что кроме N измерительных каналов коммутатором Кк организуется ещё один (N+1) канал, предназначенный для формирования и передачи специального сигнала, синхронизирующего работу распределителей ПУ и КП. Для этого используется формирователь синхронизирующего сигнала (ФСС), вырабатывающий специальный сигнал синхронизации. На рис. 8.2 приведена структурная схема, отображающая работу устройства пункта управления многоканальной цифровой системы ТИ. 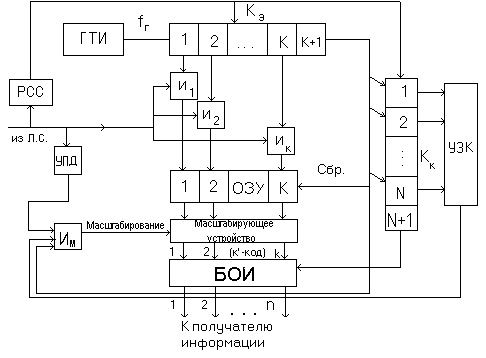 Рис. 8.2. Структурная схема устройства телемеханического пункта управления Устройство ПУ системы ТИ является приёмником сигнала телеизмерений. Его работа начинается с приёма синхронизирующего сигнала (см. раздел 8.3), который различается блоком РСС (различитель синхронизирующего сигнала). Выходной сигнал этого блока устанавливает коммутаторы каналов Кк и элементов кода Кэ приёмника в синхронное состояние соответственно с Кк и Кэ передатчика (устройства КП). Поступающая вслед за синхронизирующим сигналом кодовая комбинация первого измерительного канала записывается через схемы совпадения И1, …, Ик в оперативное запоминающее устройство ОЗУ. При совпадении двух условий – отсутствии искажений и выбранном оператором канале №1 – на (к+1) такте работы коммутатора элементов кода Кэ информация с ОЗУ поступает в масштабирующее устройство. Это устройство преобразует номер отсчёта АЦП в значение телеизмеряемой величины в технические единицы её измерения, что делает удобным её считывание оператором с блока отображения информации (БОИ). При наличии искажений в принятом сообщении УПД не выдаёт разрешающего сигнала, поэтому сообщение не поступает в масштабирующее устройство и в дальнейшем не отображается в БОИ. Если оператор выбрал не первый канал, а, например, третий, то информация третьего канала отобразится на БОИ при поступлении сообщения именно по третьему каналу, а информация по первому каналу не отобразится. При необходимости вводится устройство синфазирования по посылкам (УСП), подстраивающие фазу ГТИ приёмника под фазу ГТИ передатчика (см. раздел 8.4). Структура цифровых систем ТИ видоизменяется при использовании различных алгоритмов передачи информации и принципов построения АЦП, коммутаторов, устройств повышения достоверности и других блоков системы, однако рассмотренные основные процессы передачи и приёма сообщений сохраняются. 8.3. СИНХРОНИЗАЦИЯ В СИСТЕМАХ С ВРЕМЕННЫМ РАЗДЕЛЕНИЕМ СИГНАЛОВ Как известно, при временном разделении сигналов правильная передача сообщений возможна только при синхронной и синфазной работе коммутаторов ПУ и КП (см. раздел 3.1). Рассмотрим это на примере передачи команды телеуправления, что позволяет наглядно уяснить суть процедуры синхронизации. На временной диаграмме рис. 8.3, а показан момент передачи команды №3 с ПУ. Если коммутаторы работают синхронно и синфазно, т.е. согласованно, то в этот же момент времени команда будет принята на КП (рис. 8.3, б). Если окажется, что генератор, переключающий распределитель на КП, работает в режиме опережения с большей частотой, чем генератор на ПУ, то совпадения импульсов и позиций коммутаторов не произойдёт (рис. 8.3, в). Следовательно, команда не будет принята. Команда не будет принята и в том случае, если частота генератора на КП меньше частоты генератора на ПУ (рис. 8.3, г). 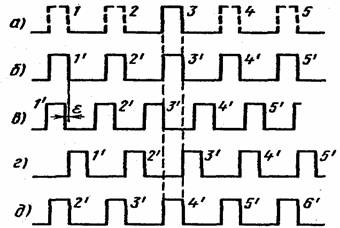 Рис. 8.3. Диаграммы передачи и приёма команды с ПУ на КП Таким образом, для правильной передачи команды в первую очередь необходимо, чтобы импульсы, поступающие с генераторов на коммутаторы КП и ПУ для их переключения, совпадали, т.е. были в фазе. Для этого требуется синфазирование импульсов. Однако даже при синфазировании по импульсам команда может быть передана ошибочно, если она неправильно ориентирована во времени, т.е. с импульсом 3, пришедшим с ПУ, совпадает, например, импульс 4' с коммутатора КП (рис. 8.3, д). Такая ошибка происходит, если нарушается синхронная работа коммутаторов. В телемеханике укоренились термины «синхронизация» и «синфазирование». Синхронизация – это работа коммутаторов устройств ПУ и КП на одних и тех же позициях в пределах цикла. Существуют следующие методы синхронизации: – циклическая или стартстопная синхронизация; – шаговая; – жёсткоциклическая. Циклическая синхронизация (рис. 8.4, а). Импульсы движения коммутаторов (или распределителей) ПУ и КП поступают от генераторов Г, частота генерации которых должна быть тождественно равной. Так как практически невозможно сделать два генератора, которые генерировали бы строго одинаковую частоту, то через некоторое время после включения импульсы движения коммутаторов на ПУ и КП не будут совпадать. Во избежание этого в начале каждого цикла с одного распределителя, называемого ведущим, обычно замкнутого в кольцо и непрерывно циклически работающего, посылается синхронизирующий сигнал (СС) на другой распределитель (ведомый), как правило, не замкнутый в кольцо. Ведомый распределитель запускается синхронизирующим сигналом в начале цикла и останавливается в его конце. В следующем цикле он вновь запускается СС, и так каждый цикл. На схеме рис. 8.4, а ведущим является распределитель ПУ, а ведомым – распределитель КП. Синхронизация распределителей в каждом цикле делает надежной их работу и является основным преимуществом циклической синхронизации. Однако в этом случае стабильность частоты генераторов должна быть такой, чтобы рассогласование их частот не привело к несовпадению импульсов в пределах одного цикла. Вероятность рассогласования возрастает с увеличением числа элементов распределителя. Во избежание рассогласования частот генераторов целесообразно использовать дополнительное синфазирование по импульсам. На рис. 8.4, а такое синфазирование для распределителя на КП условно показано стрелкой. 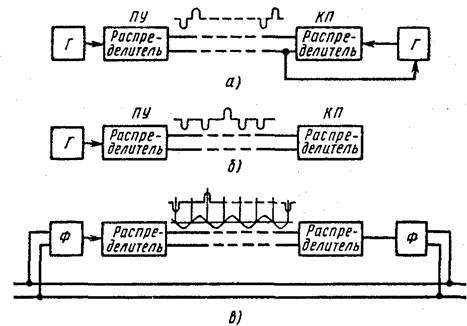 Рис. 8.4. Способы синхронизации распределителей: а – циклический или стартстопный; б – шаговый; в –жёсткоциклический Наличие синхронизирующего сигнала повышает вероятность возникновения ложной команды, так как возможно появление ложного синхронизирующего сигнала, приводящего к нарушению синхронной и синфазной работы распределителей. С помехой, создающей ложный синхронизирующий импульс, можно бороться путем запирания канала синхронизации на приёмной стороне в течение времени между посылками синхронизирующих сигналов. Предотвращение подавления синхронизирующего импульса достигается посылкой этих импульсов более помехоустойчивым способом, т.е. образованием более сложного синхронизирующего сигнала. Для того чтобы на приёмной стороне можно было выделить сигнал синхронизации среди всех поступающих из линии связи сигналов, синхронизирующий сигнал кодируется особым признаком. Существуют следующие признаки выделения или кодирования синхронизирующего сигнала: – полярность; – длительность импульса; – число единиц. На рис. 8.4 он закодирован полярностью. При использовании современных средств технической реализации телемеханических систем более удобными являются такие признаки, как число единиц или длительность импульсов синхронизирующего сигнала. Пошаговая, или шаговая, синхронизация (рис. 8.4, б). Один из распределителей (ведущий) переключается генератором, другой (ведомый) – ведущим распределителем с помощью специально посылаемых импульсов, которые называют импульсами движения, или тактовыми импульсами. Для выделения тактовых импульсов на приёмной стороне необходимо их специальное кодирование, на рис. 8.4, б они закодированы отрицательной полярностью. Иногда импульсы движения посылаются тем же генератором, который переключает ведущий распределитель. Этот способ синхронизации применяется, если, во-первых, отсутствует единая промышленная сеть переменного тока, с помощью которой можно легко осуществить синхронную работу распределителей, и, во-вторых, нельзя использовать другие методы синхронизации. Жесткоциклическая синхронизация (рис. 8.4, в). Этот способ синхронизации отличается от циклической тем, что переключение распределителей на ПУ и КП осуществляется от единой сети переменного тока через формирователи Ф, преобразующие синусоидальное напряжение в импульсы. Таким образом, вместо двух генераторов имеется один общий – сеть переменного тока. Циклическая синхронизация, устанавливающая распределители в начале каждого цикла в исходное положение, позволяет осуществить их переключение от каждой полуволны переменного тока, на рис. 8.4, в сигналы синхронизации показаны отрицательной полярностью. В телемеханике основное распространение получила циклическая синхронизация. 8.4. СИНФАЗИРОВАНИЕ В СИСТЕМАХ С ВРЕМЕННЫМ РАЗДЕЛЕНИЕМ СИГНАЛОВ Синфазирование – это переключение коммутаторов на следующую позицию в одни и те же моменты времени, равенство частот переключений. Вследствие того, что генераторы тактовых импульсов на ПУ и КП не могут генерировать с идеальной точностью одну и ту же частоту, между ними всегда будет какое-то, пусть самое незначительное расхождение, которое можно выразить в процентах к длительности генерируемого импульса (см. рис. 8.3, в) [8]. Считается, что расхождение величиной ε =40% является пределом возможной устойчивой работы двух распределителей. Если положить нестабильность генераторов равной 0,001%, то при скорости передачи 50 Бод расхождение импульсов превысит значение 40% через 6 мин. 40 сек., и далее система выйдет из строя, так как нарушится синфазная работа. При скорости передачи 1200 Бод синфазность системы нарушится через 17 сек. Расчет совместной стабильной работы генераторов можно произвести по формуле tε=ε/(2KB), (8.3) где ε – часть импульса (в процентах), в пределах которого допускается расхождение по фазе; К – относительная нестабильность генераторов; В – скорость передачи (в Бодах). Применение более стабильных генераторов увеличивает время синфазной работы, но не решает проблемы в целом, так как предотвратить расхождение частот генераторов в течение длительного времени, на которое рассчитана работа системы телемеханики, невозможно. Для обеспечения требуемых показателей синфазности необходимо применить специальные корректирующие устройства, поддерживающие расхождение генерируемых на ПУ и КП импульсов в определенных пределах. Работа корректирующего устройства будет различной в зависимости от того, по какой схеме генерируются импульсы и каким образом осуществляется коррекция. Для получения большей стабильности частоты генераторы обычно выполняются как генераторы синусоидальных колебаний, из которых потом формируются импульсы нужной формы. Для удобства генерируемую частоту выбирают значительно выше частоты, требуемой для переключения генераторов. Для формирования импульсов движения генерируемая частота уменьшается до требуемой величины с помощью импульсных делителей. По способу коррекции фазы существуют устройства с плавным управлением частоты генератора и устройства с дискретным управлением (рис. 8.5). 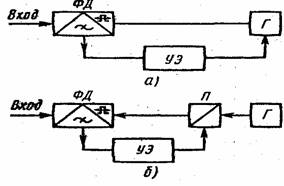 Рис. 8.5. Структурные схемы способов синфазирования: а – способ плавного управления; б – способ дискретного управления Общим элементом в них является фазовый дискриминатор ФД, в котором измеряется величина рассогласования фаз между импульсами местного генератора Г и принимаемыми импульсами. В соответствии с величиной рассогласования с выхода ФД снимается величина рассогласования. Управляющий элемент УЭ преобразует рассогласование с ФД в управляющее воздействие либо непосредственно на генератор, изменяя фазу его синусоидальных колебаний (рис. 8.5, а), либо на преобразователь П, где происходит подстройка фазы сформированных импульсов (рис. 8.5, б). Устройства, в которых подстраивается фаза генерируемых синусоидальных колебаний, называют устройствами синфазирования с плавным управлением, а иногда устройствами с автоматической подстройкой частоты и фазы генератора или с «инерционной синхронизацией». Устройства, в которых подстраивается фаза формируемых импульсов, называют устройствами синфазирования с дискретным управлением. Современным способом синфазирования является дискретное управление, суть которого отображена на диаграммах рис. 8.6. На рис. 8.7, а показана принятая на ведомой стороне, в качестве которой используется, например, КП, последовательность импульсов, поступивших с ПУ, а на рис. 8.6, б, в – импульсы, снятые после формирователя на КП, но еще не поступившие на делитель частоты импульсов. 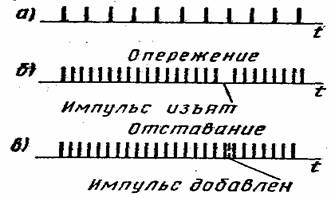 Рис. 8.6. Диаграммы синфазирования с дискретным управлением: a – импульсы с ПУ; б – вычитание импульса при опережении частоты генератора на КП; в – добавление импульса при отставании частоты Принцип синфазирования заключается в следующем. Если частота импульсов на КП опережает частоту импульсов, генерируемых на ПУ, то из серии импульсов, приходящих на делитель КП, вычитается один импульс (рис. 8.6, б). Если же частота импульсов на КП отстает, то к ней добавляется один импульс (рис. 8.7, в, где дополнительный импульс обозначен пунктиром). Это вычитание и добавление импульсов может производиться многократно, пока частоты импульсов движения на ПУ и КП не совпадут. Схема устройства синфазирования с дискретным управлением представлена на рис. 8.7. 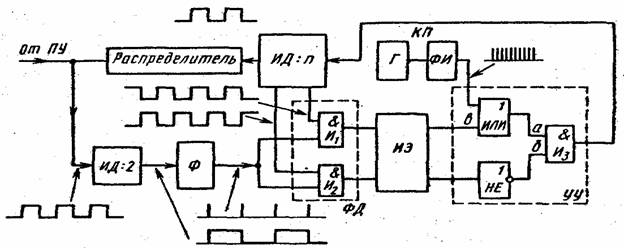 Рис. 8.7. Структурная схема устройства синфазирования с дискретным управлением Поступающие с ПУ на КП импульсы делятся в импульсном делителе ИД:2, преобразуются в короткие импульсы в формирователе Ф и подаются на элементы И1, И2 фазового дискриминатора ФД (рис. 8.8, а-в). Синусоидальное напряжение с установленного на КП генератора формируется в импульсы в формирователе ФИ, которые затем через элементы устройства управления УУ подаются в импульсный делитель ИД:n и с него на распределитель КП. Импульсы с импульсного делителя ИД:n поступают как на распределитель, так и в виде двух последовательностей в противофазе на элементы И1, И2 схемы фазового дискриминатора ФД (рис. 8.8, г, д). На вторые входы тех же элементов подаются короткие импульсы с формирователя Ф, образованные по фронтам сигналов, принимаемых с ПУ. Если генераторы работают синфазно, то короткие импульсы с формирователя Ф совпадают во времени с фронтами сигналов, поступающих с ИД:n на элементы И1 и И2. Действительно, из рис. 8.8, а-д следует, что короткие импульсы возникают до того, как импульсы с ИД:n достигнут амплитудного значения. Это означает, что на элементы И1, И2 короткие импульсы и импульсы с ИД поступают не одновременно, вследствие чего с выходов элементов И1, И2 будут сняты логические 0. Эти сигналы через интегрирующий элемент ИЭ подаются на устройство управления УУ. Сигнал с выхода элемента И2 инвертируется в элементе НЕ перед подачей на элемент И3, вследствие чего на вход б элемента И3 будет подаваться логическая 1 и этот элемент пропустит все импульсы, поступающие с формирователя ФИ через элемент ИЛИ на делитель ИД:n. Если фаза генератора на КП опережает фазу генератора на ПУ, то короткие импульсы, сформированные из сигналов ПУ с помощью делителя ИД:2 и формирователя Ф совпадают с положительными импульсами, поступающими с ИД на элемент И2, на входе которого в моменты совпадения появляется сигнал 1. Этот сигнал, будучи инвертирован в 0 в элементе НЕ, на некоторое время запрещает с помощью элемента И3 прохождение импульсов с ФИ на ИД:n. Это приводит к тому, что очередной импульс с ФИ не поступает на ИД:n, что, в конечном счёте, смещает фазу импульсов движения в сторону отставания. Если частота генератора на КП становится ниже частоты генератора на ПУ (рис. 8.8, к), то совпадение положительных импульсов произойдет на элементе И1(рис. 8.8, л) и импульс с этого элемента поступит на элемент ИЛИ устройства УУ. Это означает, что на делитель ИД поступает дополнительный импульс (рис. 8.8, м). Каждый дополнительный импульс, подаваемый на делитель ИД:n, увеличивает фазу импульсов движения. Практически приходящие с ПУ импульсы имеют искаженные фронты, и их длительность или увеличивается (см. рис. 8.8, а), или уменьшается при той же частоте. На рис. 8.9, а-д, который повторяет рис. 8.8, а-д, но в измененном виде, показано, что импульсы 1 и 2 с ПУ искажены в сторону отставания, а импульсы 3 и 4 – в сторону опережения (рис. 8.9, а). 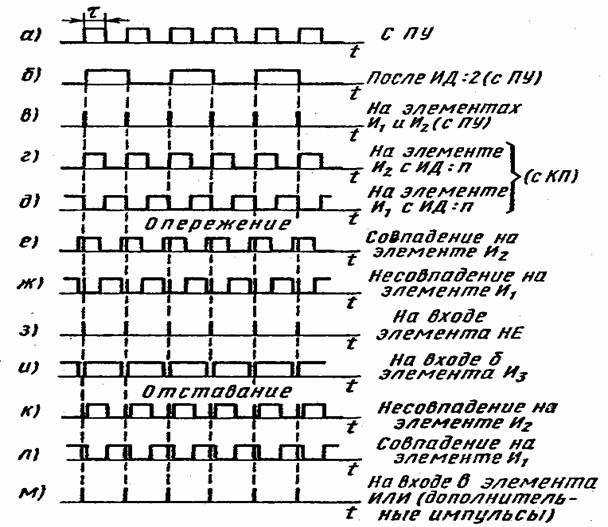 Рис. 8.8. Временные диаграммы работы устройства синфазирования с дискретным управлением Это приводит к тому, что даже при синхронной работе генераторов часть импульсов находится в фазе опережения (рис. 8.9, г), а часть – в фазе отставания (рис. 8.9, д). Это вызывает срабатывание фазового дискриминатора и добавление импульсов, идущих с генератора, или их вычитание. Иными словами, будет нарушаться синхронная работа генераторов. Поскольку искажения фронтов импульсов носят случайный характер и равновероятны изменения как в одну, так и в другую сторону, уменьшение этого эффекта достигается включением интегрирующего элемента ИЭ (см. рис. 8.8). Этот элемент суммирует поступающие на него импульсы и формирует выходные сигналы на устройство управления УУ только тогда, когда число импульсов, пришедших на один вход, считающий опережение, превысит число импульсов, поступивших на другой вход, считающий отставание, на определенное заданное число. 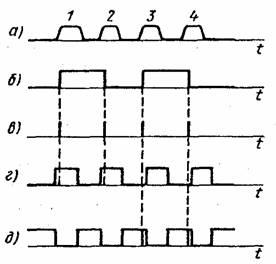 Рис. 8.9. Диаграммы процесса синфазирования при искажении фронтов импульсов В качестве ИЭ можно использовать, например, регистр с двумя входами. Первый вход, считающий импульсы опережения, переключает регистр с первого по пятый элемент, а второй, считающий импульсы отставания, с пятого по первый. Если на первый вход приходит подряд пять импульсов, то регистр срабатывает и на устройство УУ приходит импульс. Если кроме пяти импульсов, поступающих на первый вход, в промежутках между ними будут поступать импульсы и на второй вход, то регистр переключится назад и на устройство УУ ничего не поступит. КЛЮЧЕВЫЕ ТЕРМИНЫ И ПОНЯТИЯ Система телеизмерения (СТИ) – система, осуществляющая передачу на расстояние непрерывных значений измеряемых величин. Цифровая система телеизмерений – это система, в которой непрерывная измеряемая величина поступает в устройство КП, преобразуется в кодовую комбинацию, которая передаётся по линии связи с КП на ПУ, где отображается индикатором. Синхронизация – это работа коммутаторов на одних и тех же позициях в пределах цикла. Синфазирование – это переключение коммутаторов на следующую позицию в одни и те же моменты времени, равенство частот переключений. КОНТРОЛЬНЫЕ ВОПРОСЫ
9. РЕАЛИЗАЦИЯ СИСТЕМ ТЕЛЕМЕХАНИКИ В настоящее время для промышленного использования предлагаются различные варианты систем контроля и управления различными распределёнными объектами. Часто такие системы строятся по отраслевому принципу. Имеются системы, ориентированные на объекты газовой отрасли [11], системы для энергетики [12]. Создаются автоматизированные системы управления технологическими процессами (АСУ ТП), выполняющие различные телемеханические функции: ТС, ТИ, ТУ [13], ТУ, ТИТ, ТИИ, ТС [14]. Выпускники специальности ориентированы не только на эксплуатацию различных технических систем автоматического управления, но и на их разработку. Поэтому даже при наличии готовых телемеханических систем необходимо проработать вопросы создания таких систем. Именно этим вопросам посвящен настоящий раздел. 9.1. СТРУКТУРНЫЕ СХЕМЫ ОСНОВНЫХ ФУНКЦИОНАЛЬНЫХ БЛОКОВ В настоящее время основной способ технической реализации телемеханических систем – это использование программируемых логических контроллеров (ПЛК). Он эффективен при создании интегрированных автоматизированных систем управления, в которых система телемеханики представляет собой подсистему такой системы. При использовании ПЛК необходимо составить и отладить модель работы разрабатываемого устройства. В свою очередь, модель каждого элемента системы разрабатывается на основе его функциональной схемы. Рассмотрим принципы и примеры построения функциональных блоков, используемых в системах телемеханики. 9.1.1. Коммутаторы |