ТОК Лекции. Конспект лекций Самара Самарский государственный технический университет 2011
 Скачать 6.93 Mb. Скачать 6.93 Mb.
|

|
А.А. АБРОСИМОВ ТЕЛЕМЕХАНИКА Конспект лекций Самара Самарский государственный технический университет 2011
Кафедра «Автоматика и управление в технических системах» А.А. АБРОСИМОВ ТЕЛЕМЕХАНИКА Конспект лекций Самара Самарский государственный технический университет 2011 Печатается по решению редакционно-издательского совета СамГТУ УДК 621.398 ББК 32.968
Абросимов А.А. А 16 Телемеханика: конспект лекций / А.А. Абросимов. – Самара: Самар. гос. техн. ун-т, 2011. – 195 с.: ил. Рассмотрены вопросы теории и реализации устройств и систем телемеханики. Целью дисциплины «Телемеханика» является приобретение студентами теоретических знаний и практических умений в комплексе вопросов, связанных с областью применения, особенностями, принципами построения, структурами и реализацией телемеханических систем. Дисциплина обобщает и углубляет знания, полученные ранее при изучении различных дисциплин учебного плана, она требует от студента творческого применения полученных знаний. Конспект лекций предназначен для студентов дневного и заочного факультетов, обучающихся по специальности 220201 «Управление и информатика в технических системах», может быть полезен студентам других специальностей. УДК 621.398 ББК 32.968
Рецензент канд. техн. наук, доцент В.Г. Щетинин © А.А. Абросимов, 2011 © Самарский государственный технический университет, 2011 ПРЕДИСЛОВИЕ Дисциплина «Телемеханика» введена в учебный план специальности 220201 «Управление и информатика в технических системах» как дисциплина специализации. Это соответствует традиционному названию целого класса систем контроля и управления, широко применяемого в различных отраслях промышленности, в том числе в Самарском регионе. Объективно эти системы имеют ряд особенностей, существенно отличающий их от автоматизированных систем управления. В настоящее время по дисциплине отсутствуют учебники и учебные пособия.
Во второй главе вводятся основные понятия о системах телемеханики. Даётся характеристика различным типам объектов, наличие которых требует применения телемеханики, выполняющей различные телемеханические функции, рассмотрены основные структуры систем телемеханики. В третьей главе рассмотрены вопросы организации многоканальной телемеханической связи, позволяющие использовать одну линию связи для контроля и управления множеством объектов. В четвёртой главе приводится характеристика телемеханических кодов, применяемых в цифровых системах телемеханики. Большое внимание уделено корректирующим кодам, начиная с принципов их построения. Рассмотрены структуры, порядок построения наиболее широко применяемых корректирующих кодов. В пятой главе дана характеристика модуляции телемеханических сигналов, используемых для повышения помехоустойчивости передаваемых сообщений. Рассмотрены методы непрерывной модуляции и методы дискретной модуляции, приведены способы оценки спектров импульсных сигналов, применяемых в телемеханике. В шестой главе рассмотрены вопросы организации телемеханических линий и каналов связи. Основное внимание уделено проводным линиям связи, имеющим широкое распространение: дано определение первичным и вторичным параметрам, режиму и условиям согласованной передачи электромагнитной энергии по проводной линии, особенностям использования линий электропередач в телемеханике. Рассмотрены вопросы организации телемеханических каналов с применением радиосвязи, получающей всё большее распространение. Вопросы помехоустойчивости систем телемеханики рассмотрены в седьмой главе. При передаче на большие расстояния телемеханические сигналы подвергаются воздействию помех и искажаются. Поэтому повышение помехоустойчивости, оцениваемое теорией В.А. Котельникова и реализуемое для телемеханики иными методами, является чрезвычайно актуальным. Принципы построения телемеханических систем, рассмотренные в восьмой главе, приведены на примере системы телеизмерений с временным разделением сигналов. Телемеханическая функция телеизмерений, во-первых, является наиболее распространённой в системах телемеханики, во-вторых, она является наиболее сложной в реализации. Приведено описание типовой структуры комплекса устройств цифровой системы телеизмерений, рассмотрены вопросы синхронизации и синфазирования работы распределителей. В заключительной девятой главе рассмотрены вопросы реализации систем телемеханики, построения основных функциональных блоков и узлов. ВВЕДЕНИЕ Во многих случаях возникает необходимость контролировать состояние и управлять режимами работы современных объектов, которые рассредоточены на больших площадях или расстояниях. Это магистральные продуктопроводы, нефтяные и газовые месторождения, электрические сети, железнодорожные магистрали и другие. Такие объекты управления отличаются от обычных объектов одним фактором – расстоянием между объектом контроля или управления и местом, с которого производится управление, где вырабатываются команды управления или отображается состояние объектов. Применение обычных систем автоматического управления для таких объектов оказывается неэффективным, так как каждый объект требует отдельного канала связи, по которому передаются сигналы от объекта до места выработки команд и обратно. Кроме того, передача на большие расстояния сигналов контроля и управления сопровождается их искажением. Чтобы преодолеть влияние фактора расстояния и сделать это наиболее экономичным способом, применяются специальные системы, получившие название телемеханических систем. Поэтому целью настоящей дисциплины является изучение принципов построения, отличительных особенностей, типовых задач, решаемых при создании систем телемеханики. Изучение теоретических вопросов дополняется выполнением курсового проекта, работа над которым позволяет закрепить получаемые знания практическим проектированием. 1. ПРЕДМЕТ ТЕЛЕМЕХАНИКИ 1.1. ОПРЕДЕЛЕНИЕ, ОСОБЕННОСТИ И ОСНОВНЫЕ ПРОБЛЕМЫ ТЕЛЕМЕХАНИКИ Термин «телемеханика», введенный в 1905 г. французским инженером Э. Бранли, состоит из двух греческих слов: Tе1е – далеко и Mechanike – мастерство, или наука о машинах. Телемеханика – отрасль науки и техники, охватывающая теорию и технические средства контроля и управления объектами на расстоянии с применением специальных преобразователей сигналов для эффективного использования каналов связи. В телемеханике передача информации осуществляется без непосредственного участия человека, человек-оператор находится в пункте управления, где принимает информацию о состоянии контролируемых объектов, а также может вырабатывать команды управления. Однако в некоторых областях применения телемеханики (медицина, космос, спорт и т.п.) человек находится на обеих сторонах передачи, но на одной из сторон он является объектом контроля. Кроме телемеханики, имеется ряд отраслей техники, занимающихся передачей информации – телеграф, телефон, телевидение и др. Хотя научные основы всех методов и средств передачи информации, в том числе телемеханики, базируются на общей теории связи и теории информации, промышленная телемеханика имеет следующие особенности, отличающие телемеханику от перечисленных средств связи: 1. Необходимость высокой точности передачи информации. Например, системы телеизмерений могут иметь точность до 0,05%. 2. Недопустимость большого запаздывания в передаче информации при управлении, так как длительная задержка передаваемых сообщений в телемеханике в ряде случаев может вызвать аварию. 3. Необходимость большой надежности в передаче команд, так как ошибки при передаче команд могут привести к аварии. Отсюда – требование к большей достоверности передачи информации. Так, в телеуправлении допустимая вероятность возникновения ложной команды составляет величину порядка 10-14, что намного выше требований к достоверности передачи в других видах связи [1]. 4. Отличие входных и выходных устройств систем телемеханики от таких же устройств в системах связи. Источниками информации в устройствах телемеханики являются датчики, командные устройства, а в системах связи – микрофон, передающая телевизионная камера. 5. Централизованность передачи информации. В телемеханике передача информации, как правило, осуществляется от объектов, которые рассредоточены на большой площади или расстоянии, в единый пункт управления, где находится человек-оператор или управляющий вычислительный комплекс. При передаче телемеханической информации можно выделить следующие проблемы: 1) достоверности, т.е. передачи информации с малыми искажениями, возникающими как в аппаратуре, так и при передаче по линии связи из-за помех; 2) эффективности, т.е. нахождения способов лучшего использования аппаратуры и линии связи при передаче большого количества информации; 3) экономичности, т.е. построения простых и дешевых устройств телемеханики, обеспечивающих наибольшее количество передаваемой информации при наименьшей затрате средств. Исходя из определения телемеханики структурную схему системы телемеханики можно представить в виде, отображённом на рис. 1.1. Как видно из рисунка, основными составляющими системы телемеханики (СТМ) являются устройство пункта управления, линии связи и устройство контролируемого пункта. В телемеханике широко используются следующие понятия. Контролируемый телемеханический пункт (КП) – место размещения объектов, контролируемых или управляемых средствами телемеханики. Телемеханический пункт управления (ПУ) – это место, с которого осуществляется управление или контроль состояния объектов, расположенных на контролируемом пункте. При частичной автоматизации в пункте управления находится диспетчер. 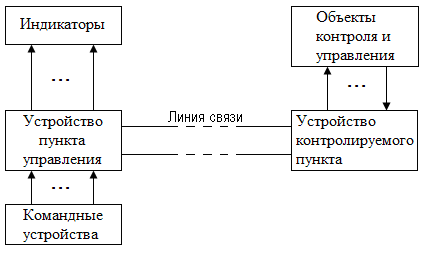 Рис. 1.1. Структурная схема системы телемеханики Устройство телемеханики – совокупность технических средств телемеханики, расположенных на телемеханическом пункте управления или контролируемом телемеханическом пункте. Комплекс устройств телемеханики – совокупность устройств пунктов управления и контролируемых пунктов, предназначенных для совместного применения в телемеханических системах. Телемеханическая система – совокупность устройств пунктов управления и контролируемых пунктов, периферийного оборудования, необходимых линий и каналов связи, предназначенных для совместного выполнения телемеханических функций. 1.2. КРАТКАЯ ИСТОРИЯ РАЗВИТИЯ ТЕЛЕМЕХАНИКИ Телемеханика как область науки и техники возникла на базе развития автоматики, радиотехники и связи. В начале 30-х годов в нашей стране первой отраслью промышленности, в которой стала применяться телемеханика, явились энергетические системы. Сначала применялись системы телеизмерения, а затем системы телеуправления и телесигнализации для централизованного управления генераторами на станциях, масляными выключателями на подстанциях и контроля исправности работы оборудования. Первая автоматизированная гидроэлектростанция с управлением на расстоянии была построена в нашей стране в 1932 г. Несколько позже была осуществлена телемеханизация на канале им. Москвы. Телемеханика использовалась для телеуправления шлюзами, насосными станциями на расстоянии до 60 км из центрального диспетчерского пункта [2]. Телемеханические устройства строились в основном на электромеханических реле и электронных лампах с использованием многопроводных линий связи. Аппаратура получалась громоздкой, медленно действующей и не очень надёжной, каждая система создавалась как уникальная [3]. В 50-х годах создаётся промышленное производство телемеханических систем на специализированных заводах приборостроения. По критерию элементной базы можно выделить несколько поколений систем телемеханики. Первое поколение было реализовано на быстродействующих бесконтактных элементах (полупроводниковых приборах, магнитных элементах с прямоугольной петлей гистерезиса, лампах с холодным катодом и т.п.). Эти элементы позволили отказаться от ненадёжных релейных контактов, начались серьезные теоретические исследования и практические работы по их использованию в телемеханике. Это не была автоматическая замена старых элементов новыми элементами. Более широкие возможности новых элементы потребовали новых идей в конструировании аппаратуры и длительных исследований. В результате было разработано много оригинальных бесконтактных телемеханических устройств, повысивших эффективность контроля и управления. Второе поколение было основано на использовании унифицированных субблоков, из которых собиралась номенклатура выпускаемых систем телемеханики. Например, комплекс унифицированных субблоков «Спектр» представлял собой набор типовых блоков, каждый из которых был законченным функциональным элементом, сопрягаемым с другими функциональными элементами, имел объёмную конструкцию, заливаемую синтетической смолой. Примерами субблоков являются субблоки генератора тактовых импульсов, источников питания, шифратора, дешифратора и других функциональных элементов. Это повысило унификацию в производстве, вместо жёсткой конфигурации системы появился набор модификаций по выполняемым функциям и информационным объёмам, повысилась надёжность в эксплуатации. Преимущество субблоков «Спектр» было реализовано в комплексе устройств телемеханики «Нарт – 67». Третье поколение (с середины 70-х годов) основано на применении интегральных микросхем, с использованием которых были разработаны укрупнённые функциональные блоки и узлы [4, 5]. Обобщались теоретические работы в области телемеханики [6]. Расширялась область применения телемеханики [7]. Устройства телемеханики на интегральных схемах эксплуатировались в течение длительного времени. Четвёртое поколение (с середины 80-х годов) основано на применении больших интегральных схем (БИС), использование которых позволило перевести всю обработку информации в цифровую форму. Современные системы телемеханики создаются как многоуровневые автоматизированные системы управления технологическими объектами и процессами, в которых на нижнем уровне в качестве управляющих устройств применяются программируемые логические контроллеры, а на верхнем – персональные ЭВМ. Эффективность применения устройств и систем телемеханики сводится к следующему. Телемеханика увеличивает оперативность управления, сокращает численность обслуживающего персонала и повышает производительность труда, что в итоге увеличивает количество выпускаемой продукции и снижает ее себестоимость. В некоторых производственных процессах телемеханика позволяет высвободить людей с работ, опасных для здоровья, а при управлении движущимися объектами без телемеханики обойтись вообще невозможно. 1.3. ПРИМЕНЕНИЕ СИСТЕМ ТЕЛЕМЕХАНИКИ В САМАРСКОЙ ОБЛАСТИ Для промышленного производства Самарской области характерны объекты, расположенные на значительных площадях или расстояниях, т.е. распределённые объекты. Это нефтепромыслы, нефте- и газопроводы, сеть железных дорог, развитая сеть линий электропередач. Для контроля и управления этими объектами требуются телемеханические системы. Нефтедобывающие предприятия ОАО «Самаранефтегаз» широко используют системы телемеханики для оперативного контроля режимов работы нефтедобывающих скважин (давление и температура скважины, обороты и производительность электронасоса и др.), что составляет нижний уровень автоматизированной системы управления. В Приволжском управлении магистральных нефтепроводов все технологические параметры контролируются и управляются системами телемеханики. Технические специалисты в этой области готовились и готовятся в том числе на нашей специальности. Объединение «Самаратрансгаз» аналогичным образом решает задачи автоматизации газопроводов. Широкое применение находят различные системы телемеханики на железнодорожном транспорте. Их применение многопрофильно, устройства телемеханики заменили некоторые профессии, от которых остались лишь поговорки (например, профессия стрелочника). В энергетике диспетчеризация процессов передачи электрической энергии решается на основе систем телемеханики, и крупным региональным центром диспетчеризации является объединение «Волгоэнерго», расположенное в г. Самаре. Город Самара является одним из крупных мегаполисов России, и для поддержания его нормального функционирования также требуются системы телемеханики. В Самарском водоканале, например, диспетчеризация режимов работы технологического оборудования осуществляется с применением систем телемеханики. Системы телемеханики применяются на ряде промышленных предприятий, представляющих собой сосредоточенные телемеханические объекты. Это нефтеперерабатывающий завод в г. Самаре, объединение «Тольяттиазот» в г. Тольятти, где энергетические объекты контролируются и управляются средствами телемеханики. КЛЮЧЕВЫЕ ТЕРМИНЫ И ПОНЯТИЯ |
