ТОК Лекции. Конспект лекций Самара Самарский государственный технический университет 2011
 Скачать 6.93 Mb. Скачать 6.93 Mb.
|

Коммутатор, или распределитель,– это устройство с одним входом и многими выходами. На вход коммутатора подаются тактовые импульсы переключения, выходной сигнал логической единицы последовательно появляется на одном выходе, начиная с первого и заканчивая последним.Однотактный распределитель на четырёх D-триггерах. Схема такого распределителя приведена на рис. 9.1, а (число триггеров может быть любым). Выходпредыдущего триггера соединён с входомD следующего триггера. Выход последнего триггера может быть соединён с входом первого, минуя элемент ИЛИ – НЕ (пунктир на рисунке). Распределитель будет работать и в этом случае. Однако если по каким-либо причинам одновременно начнут переключаться два триггера или более (случай, возможный при большом числе триггеров), т.е. начнут циркулировать две единицы или больше, то такую ошибку исправить без остановки распределителя невозможно. Для предотвращения перехода подобных ошибок в следующий цикл предусмотрена защита в виде элемента ИЛИ – НЕ, на который подаются выходы всех триггеров. Когда переключится последний триггер в текущем цикле, на входы этого элемента со всех выходов триггеров будут поданы нули, что обеспечит поступление на вход D первого триггера единицы, а также его подготовку. Если вместе с переключением последнего триггера будет переключаться ещё какой-нибудь, например второй, триггер, то на вход элемента ИЛИ – НЕ будет подана комбинация 0100 вместо 0000, что не обеспечит снятия с его выхода единицы. Когда распределитель переключится до конца, т.е. последует комбинация 0100, 0010, 0001 и, наконец, 0000 (Q4=0), первый триггер будет подготовлен и распределитель начнёт далее правильно работать. На рис. 9.1, б представлена временная диаграмма распределителя, иллюстрирующая изложенную последовательность процессов работы. 9.1.2. Устройство повышения достоверности Устройство повышения достоверности (УПД) – это устройство, преобразующее двоичный код в помехозащищённый код на передающей стороне и выполняющее обратное преобразование на приёмной стороне. Схема УПД определяется типом принятого помехозащищённого кода и методом его формирования. На рис. 9.2 представлена функциональная схема УПД для кода с проверкой на чётность (нечётность) в последовательном виде представления символов. Она реализована на счётном триггере (Т-триггере). 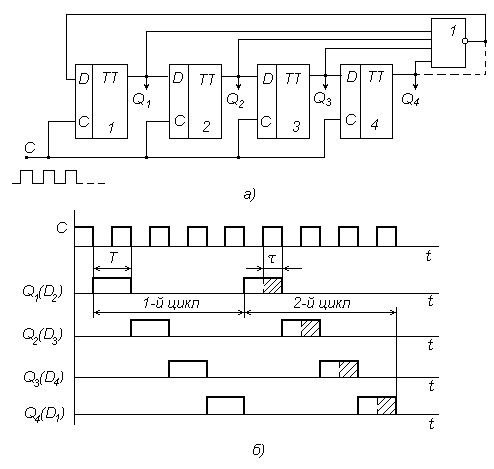 Рис. 9.1. Распределитель на D-триггерах а – функциональная схема; б – временная диаграмма. 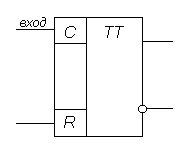 Рис. 9.2. Функциональная схема устройства повышения достоверности При подаче на R-вход сигнала триггер приходит в нулевое исходное состояние, на прямом выходе появляется сигнал логического 0. При последовательной подаче на вход С элементов двоичного кода выходной сигнал будет изменяться только при поступлении на вход символа 1 и не будет изменяться при поступлении символа 0. Кроме того, при поступлении двух единиц выходной сигнал снова будет равен 0. Это означает, что если в комбинации двоичного кода число единиц чётное, то по окончании их предъявления на выходе будет 0, который представляет собой контрольный разряд кода с проверкой на чётность. Этот контрольный разряд необходимо добавить к информационной комбинации двоичного кода. Код с проверкой на нечётность формируется точно так же, для этого используется инверсный выход триггера. 9.1.3. Устройство масштабирования Устройство масштабирования преобразует номер отсчёта АЦП в значение телеизмеряемой величины в технических единицах её измерения. Масштабирующее устройство характеризуется коэффициентом передачи m. При использовании ПЛК это устройство реализуется введением масштабирующего элемента, коэффициент передачи которого подлежит расчёту в процессе проектирования цифровой системы телемеханики. 9.1.4. Генератор тактовых импульсов Генератор тактовых импульсов служит для выработки тактовых сигналов. Данный генератор построен на основе логических элементов (рис. 9.3) с положительной обратной связью на конденсаторе C, которая охватывает элементы DD1.1 и DD1.2. Элемент DD1.1 введён в линейный усилительный режим с помощью резистора R отрицательной обратной связи. Элемент DD1.3 применяется здесь как буферный. 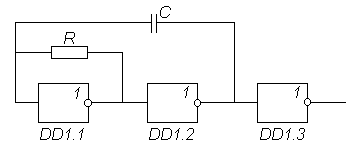 Рис. 9.3. Функциональная схема генератора тактовых импульсов Генерируемая частота определяется величинами С иR. 9.2. ПРОГРАММНО-ТЕХНИЧЕСКАЯ РЕАЛИЗАЦИЯ ФУНКЦИОНАЛЬНЫХ БЛОКОВ НА ПРОГРАММИРУЕМЫХ ЛОГИЧЕСКИХ КОНТРОЛЛЕРАХ Программируемые логические контроллеры (ПЛК) представляют собой устройства программно-технического типа. Они требуют для своей работы не только технических средств определённого набора, но и составления программы их работы. Набор технических средств определяется типом задач, решаемых ПЛК. Для реализации дискретных телемеханических функций, например, телеуправления или телесигнализации, применяется набор блоков, реализующих дискретные функции. Для реализации непрерывных телемеханических функций, например, телеизмерения или телерегулирования, в набор блоков включаются элементы, реализующих непрерывные функции. Для составления программы необходимо предварительно составить алгоритм, по которому и выполняется дальнейшее программирование. Комплекс устройств телемеханики естественным образом разделяется на устройство ПУ и устройство КП. Ранее были рассмотрены структурные схемы устройств ПУ и КП цифровой системы телеизмерения, представленные на рис. 8.1 и 8.2. В них отображено исполнение основных функций системы. В действующих системах телемеханики эти функции дополняются рядом других, например, функцией контроля исправности линии связи и других блоков системы. Поскольку одним из важнейших показателей системы является её помехоустойчивость, то с этой целью применяется многоступенчатая защита от помех. Например, на нижнем уровне каждый посылаемый байт защищается корректирующим кодом с проверкой на нечётность (чётность), на следующем уровне – группа сообщений, передаваемых в течение цикла, защищается корректирующим циклическим кодом с обнаружением ошибки, на следующем уровне применяется решающая обратная связь. Для составления алгоритма работы устройства необходимо: – определить состав функциональных блоков, входящих в устройство; – для каждого функционального блока составить алгоритм работы; – для каждого функционального блока рассчитать требуемые параметры; – объединить функциональные блоки в единое устройство и по требуемой работе устройства составить алгоритм; – при необходимости вернуться к исходному составу функциональных блоков, скорректировать его и повторить процедуру алгоритмизации. Выбор языка программирования во многом определяется типом принятого набора контроллеров. Например, для программирования промышленных контроллеров фирмы SCHNEIDER ELECTRIC используются средства Concept DFB. Программирование модели работы каждого функционального блока выполняется на паскалеподобном языке структурированного текста (ST), который предназначен для решения подобных задач. Более детально задача программирования была рассмотрена в дисциплине «Технические средства автоматизации и управления». КЛЮЧЕВЫЕ ТЕРМИНЫ И ПОНЯТИЯ Коммутатор (или распределитель)– это устройство с одним входом и многими выходами, на вход коммутатора подаются тактовые импульсы переключения, выходной сигнал логической единицы последовательно появляется на одном выходе, начиная с первого и заканчивая последним. Устройство повышения достоверности – это устройство, преобразующее двоичный код в помехозащищённый код на передающей стороне и выполняющее обратное преобразование на приёмной стороне. Устройство масштабирования служит для преобразования номера отсчёта АЦП в значение телеизмеряемой величины в технических единицах её измерения. КОНТРОЛЬНЫЕ ВОПРОСЫ
ЗАКЛЮЧЕНИЕ В конспекте лекций изложены основные теоретические вопросы, характеризующие задачи контроля и управления объектами, рассредоточенными на значительных площадях или расстояниях. На примере системы телеизмерений освещены вопросы проектирования современных цифровых систем телемеханики с использованием программируемых логических контроллеров. При разработке систем телемеханики необходимо сочетание несложных и во многом интересных вопросов, изложенных в настоящем конспекте лекций, с ранее полученными знаниями по другим дисциплинам учебного плана. Такими дисциплинами являются математические основы теории систем, теоретические основы кибернетики, электротехника и электроника, схемотехника цифровых устройств, технические средства автоматизации и управления, информационное обеспечение систем управления и некоторые другие. Сочетание учебного материала указанных дисциплин в конкретной проектной задаче, как правило, различно, и это создаёт определённые трудности для обучаемого. Эти трудности, несомненно, преодолимы, но их необходимо иметь в виду при практическом применении изложенного материала. В конспект включен ряд вопросов, которые могут выноситься на самостоятельную проработку, учитывая их несложный характер и объём выделенного лекционного времени. К таким вопросам относится часть разделов «Коды в телемеханике», «Модуляция телемеханических сигналов» и других. Включение их в конспект позволяет студентам сократить время на поиск информации в библиографических источниках, а также контролировать усвоение материала по контрольным вопросам. БИБЛИОГРАФИЧЕСКИЙ СПИСОК 1. Ильин, В.А. Телеуправление и телеизмерение. – М.: Энергоиздат, 1982. – 560 с. 2. Райнес, Р.Л., Горяинов, О.А. Телеуправление. – М.: Энергия, 1965. – 536 с. 3. Катков, Ф.А., Дидык, Б.С., Стулов, В.А. Телемеханика. – Киев: Вища школа, 1974. – 248 с. 4. Пшеничников, А.М., Портнов, М.Л. Телемеханические системы на интегральных микросхемах. – М.: Энергия, 1977. – 296 с. 5. Устройства телемеханики на элементах третьего поколения для управления объектами трубопроводного транспорта. – М.: ВНИИОЭНГ, 1978. – 157 с. 6. Макаров, В.А. Теоретические основы телемеханики. – Л.: Изд. ЛГУ, 1974. – 287 с. 7. Митюшкин, К.Г. Телеконтроль и телеуправление в энергосистемах. – М.: Энергоатомиздат, 1990. – 314 с. 8. Тутевич В.А. Телемеханика. – М.: Высш. шк., 1985. – 423 с. 9. Колесник, В.Д., Мирончиков Е.Т. Декодирование циклических кодов. – М.: Связь, 1968. – 320 с. 10. Малов, В.С., Купершмидт, Я.А. Телеизмерение. – М.: Энергия, 1975. – 352 с. 11. http://www.rosteleservice.ru/products-and-services/telemechanics-systems/ 12. http://telemex.nm.ru/news.htm 13. http://www.asutp.ru/?p=600521 14. http://www.mir-omsk.ru/products/avtosistem/AIICKYE/ ОГЛАВЛЕНИЕ ПРЕДИСЛОВИЕ 4 ВВЕДЕНИЕ 6 1. ПРЕДМЕТ ТЕЛЕМЕХАНИКИ 7 1.1. ОПРЕДЕЛЕНИЕ, ОСОБЕННОСТИ И ОСНОВНЫЕ ПРОБЛЕМЫ ТЕЛЕМЕХАНИКИ 7 1.2. КРАТКАЯ ИСТОРИЯ РАЗВИТИЯ ТЕЛЕМЕХАНИКИ 10 1.3. ПРИМЕНЕНИЕ СИСТЕМ ТЕЛЕМЕХАНИКИ В САМАРСКОЙ ОБЛАСТИ 12 КЛЮЧЕВЫЕ ТЕРМИНЫ И ПОНЯТИЯ 14 КОНТРОЛЬНЫЕ ВОПРОСЫ 14 2. ОСНОВНЫЕ ПОНЯТИЯ О СИСТЕМАХ ТЕЛЕМЕХАНИКИ 15 2.1. ОБЪЕКТЫ ТЕЛЕМЕХАНИКИ 15 2.2. ТЕЛЕМЕХАНИЧЕСКИЕ ФУНКЦИИ 16 2.3. ОСНОВНЫЕ СТРУКТУРЫ СИСТЕМ ТЕЛЕМЕХАНИКИ 20 КЛЮЧЕВЫЕ ТЕРМИНЫ И ПОНЯТИЯ 26 КОНТРОЛЬНЫЕ ВОПРОСЫ 27 3. ОРГАНИЗАЦИЯ МНОГОКАНАЛЬНОЙ ТЕЛЕМЕХАНИЧЕСКОЙ СВЯЗИ 27 3.1. ВРЕМЕННОЕ РАЗДЕЛЕНИЕ СИГНАЛОВ 27 3.2. ЧАСТОТНОЕ РАЗДЕЛЕНИЕ СИГНАЛОВ 31 3.3. ЧАСТОТНО-ВРЕМЕННОЕ РАЗДЕЛЕНИЕ СИГНАЛОВ 34 КЛЮЧЕВЫЕ ТЕРМИНЫ И ПОНЯТИЯ 35 КОНТРОЛЬНЫЕ ВОПРОСЫ 35 4. КОДЫ В ТЕЛЕМЕХАНИКЕ 35 4.1. КОД И ЕГО ХАРАКТЕРИСТИКИ 36 4.2. КЛАССИФИКАЦИЯ КОДОВ 37 4.3. ОБЩИЕ СПОСОБЫ ПРЕДСТАВЛЕНИЯ КОДОВ 38 4.4. ПЕРВИЧНЫЕ КОДЫ 40 4.4.1. Единичный (унитарный, числоимпульсный) код 40 4.4.2. Единичный позиционный код 41 4.4.3. Единично-десятичный код 42 4.4.4. Двоичный нормальный (натуральный) код 42 4.4.5. Двоично-десятичные коды 43 4.4.6. Код Грея 45 4.5. КОРРЕКТИРУЮЩИЕ КОДЫ. ПРИНЦИПЫ ОБНАРУЖЕНИЯ И ИСПРАВЛЕНИЯ ОШИБОК 51 4.6. КОДЫ С ОБНАРУЖЕНИЕМ ОШИБОК 56 4.6.1. Коды, построенные путём уменьшения числа используемых комбинаций 56 4.6.1.1. Код с постоянным весом 56 4.6.1.2. Распределительный код 57 4.6.2. Коды, построенные добавлением контрольных разрядов 58 4.6.2.1. Код с проверкой на чётность 58 4.6.2.2. Код с числом единиц, кратным трём 60 4.6.2.3. Код с удвоением элементов (корреляционный код) 60 4.6.2.4. Инверсный код 61 4.7. КОДЫ С ОБНАРУЖЕНИЕМ И ИСПРАВЛЕНИЕМ ОШИБОК 64 4.7.1. Коды Хэмминга 64 4.7.2. Циклические коды 73 4.7.3. Итеративные коды 82 КЛЮЧЕВЫЕ ТЕРМИНЫ И ПОНЯТИЯ 84 КОНТРОЛЬНЫЕ ВОПРОСЫ 85 5. СИГНАЛЫ В ТЕЛЕМЕХАНИКЕ 86 5.1. МОДУЛЯЦИЯ СИГНАЛОВ 86 5.2. АМПЛИТУДНАЯ МОДУЛЯЦИЯ 87 5.3. ЧАСТОТНАЯ МОДУЛЯЦИЯ 95 5.4. ДВУКРАТНАЯ НЕПРЕРЫВНАЯ МОДУЛЯЦИЯ 100 5.5. ИМПУЛЬСНЫЕ МЕТОДЫ МОДУЛЯЦИИ 101 5.5.1. Амплитудно-импульсная модуляция 102 5.5.2. Широтно-импульсная модуляция 103 5.5.3. Фазоимпульсная модуляция 103 5.5.4. Частотно-импульсная модуляция (ЧИМ) 104 5.5.5. Кодоимпульсная модуляция (КИМ) 104 5.5.6. Дельта-модуляция 104 5.5.7. Разностно-дискретная модуляция (РДМ) 106 5.5.8. Лямбда-дельта-модуляция 107 5.5.9. Многократные методы модуляции 108 5.6. СПЕКТРЫ ИМПУЛЬСНЫХ СИГНАЛОВ 110 КЛЮЧЕВЫЕ ТЕРМИНЫ И ПОНЯТИЯ 115 КОНТРОЛЬНЫЕ ВОПРОСЫ 116 6. ЛИНИИ И КАНАЛЫ СВЯЗИ В ТЕЛЕМЕХАНИКЕ 117 6.1. ЛИНИИ СВЯЗИ И ИХ КЛАССИФИКАЦИЯ 117 6.2. ПРОВОДНЫЕ ЛИНИИ СВЯЗИ 119 6.3. КАНАЛЫ СВЯЗИ ПО ЛИНИЯМ ЭЛЕКТРОПЕРЕДАЧ 128 6.4. КАНАЛЫ СВЯЗИ ПО РАДИО 132 КЛЮЧЕВЫЕ ТЕРМИНЫ И ПОНЯТИЯ 136 КОНТРОЛЬНЫЕ ВОПРОСЫ 137 7. ПОМЕХОУСТОЙЧИВОСТЬ СИСТЕМ ТЕЛЕМЕХАНИКИ 137 7.1. ПОМЕХИ И ИХ ХАРАКТЕРИСТИКИ 137 7.2. ИСКАЖЕНИЕ СИГНАЛОВ ПОД ДЕЙСТВИЕМ ПОМЕХ 143 7.3. ТЕОРИЯ ПОТЕНЦИАЛЬНОЙ ПОМЕХОУСТОЙЧИВОСТИ В.А. КОТЕЛЬНИКОВА 148 7.4. ПОМЕХОУСТОЙЧИВОСТЬ РЕАЛЬНЫХ ПРИЁМНИКОВ ТЕЛЕМЕХАНИЧЕСКИХ СИГНАЛОВ 151 7.5. ПОМЕХОУСТОЙЧИВОСТЬ ПЕРЕДАЧИ КОДОВЫХ КОМБИНАЦИЙ ПРИ НЕЗАВИСИМЫХ ОШИБКАХ 155 7.6. МЕТОДЫ ПОВЫШЕНИЯ ПОМЕХОУСТОЙЧИВОСТИ 160 7.6.1. Классификация методов повышения помехоустойчивости 160 7.6.2. Передача с повторением 161 7.6.3. Передача с обратной связью 162 КЛЮЧЕВЫЕ ТЕРМИНЫ И ПОНЯТИЯ 167 КОНТРОЛЬНЫЕ ВОПРОСЫ 167 8. ПРИНЦИПЫ ПОСТРОЕНИЯ ТЕЛЕМЕХАНИЧЕСКИХ СИСТЕМ 168 8.1. ХАРАКТЕРИСТИКИ СИСТЕМ ТЕЛЕИЗМЕРЕНИЯ 168 8.2. ЦИФРОВЫЕ СИСТЕМЫ ТЕЛЕИЗМЕРЕНИЙ 172 8.3. СИНХРОНИЗАЦИЯ В СИСТЕМАХ С ВРЕМЕННЫМ РАЗДЕЛЕНИЕМ СИГНАЛОВ 176 8.4. СИНФАЗИРОВАНИЕ В СИСТЕМАХ С ВРЕМЕННЫМ РАЗДЕЛЕНИЕМ СИГНАЛОВ 180 КЛЮЧЕВЫЕ ТЕРМИНЫ И ПОНЯТИЯ 187 КОНТРОЛЬНЫЕ ВОПРОСЫ 188 9. РЕАЛИЗАЦИЯ СИСТЕМ ТЕЛЕМЕХАНИКИ 188 9.1. СТРУКТУРНЫЕ СХЕМЫ ОСНОВНЫХ ФУНКЦИОНАЛЬНЫХ БЛОКОВ 189 9.1.1. Коммутаторы 189 9.1.2. Устройство повышения достоверности 190 9.1.3. Устройство масштабирования 192 9.1.4. Генератор тактовых импульсов 192 9.2. ПРОГРАММНО-ТЕХНИЧЕСКАЯ РЕАЛИЗАЦИЯ ФУНКЦИОНАЛЬНЫХ БЛОКОВ НА ПРОГРАММИРУЕМЫХ ЛОГИЧЕСКИХ КОНТРОЛЛЕРАХ 193 КЛЮЧЕВЫЕ ТЕРМИНЫ И ПОНЯТИЯ 195 КОНТРОЛЬНЫЕ ВОПРОСЫ 195 ЗАКЛЮЧЕНИЕ 195 БИБЛИОГРАФИЧЕСКИЙ СПИСОК 196 ОГЛАВЛЕНИЕ 198 Учебное издание АБРОСИМОВ Альберт Александрович Телемеханика Редактор Ю.А. Петропольская Верстка Е.О. Образцова Выпускающий редактор Е.В. Абрамова Подписано в печать 05.09.11 Формат 6084 1/16. Бумага офсетная Усл. п. л. 11,62. Уч.-изд. л. 11,25 Тираж 50 экз. Рег. №E13/11  Государственное образовательное учреждение высшего профессионального образования «Самарский государственный технический университет» 443100, г. Самара, ул. Молодогвардейская, 244. Главный корпус Отпечатано в типографии Самарского государственного технического университета 443100, г. Самара, ул. Молодогвардейская, 244. Корпус №8 |