Конструкция трансформаторов Трансформатор представляет собой линейный электромагнитный аппарат
 Скачать 1.16 Mb. Скачать 1.16 Mb.
|

|
Часть электромагнитной мощности, как мы выяснили выше, теряется в виде электрических потерь в обмотке ротора, а остальная часть мощности Часть механической мощности Полезная мощность на валу двигателя
В соответствии с изложенным энергетическую диаграмму двигателя можно представить в виде, показанном на рис. 4.10. Сумма потерь  . .КПД двигателей мощностью от 1 кВт до 1000 кВт лежит в пределах 26. вопрос Векторная диаграмма асинхронного двигателя Для построения векторной диаграммы асинхронного двигателя необходимо чтобы параметры цепи ротора были приведены к цепи статора. Это достигается заменой числа витков одной фазной обмотки w2, с числом фаз m2 и обмоточным коэффициентом kоб2 на w1, m1, kоб1. Энергетические параметры должны быть пересчитаны правильно, для того чтобы сохранить энергетические соотношения в двигателе. ЭДС приведенной вторичной обмотки  Коэффициент трансформации токов  Отсюда приведенный ток вторичной обмотки  В асинхронном двигателе с короткозамкнутым ротором числа фаз m1 и m2 не равны, потому что каждый стержень короткозамкнутой обмотки рассматривается как отдельная фаза, число витков такой обмотки w2=0.5, а число фаз равно числу стержней m2=Z2. Обмоточный коэффициент для такой обмотки kоб2=1. Исходя из этого ke≠ki, в отличие от трансформатора. Активное и индуктивное сопротивления вторичной обмотки  Угол сдвига фаз между E2’ и I2’  Уравнения токов, напряжений статора и ротора  На основании этих уравнений выполняется построение векторной диаграммы асинхронного двигателя 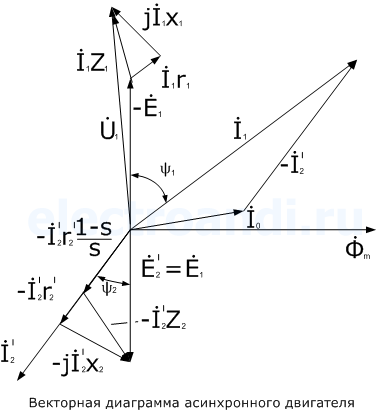 Построение векторной диаграммы начинается с вектора основного магнитного потока Ф. Затем откладываются вектора E2’ и E1, которые отстают от вектора Ф на 90⁰. Затем зная угол сдвига фаз ψ2 между I2’ и E2’, строят вектор I2’. Вектор I0 опережает Ф на угол δ, а вектор I1 находят как векторную сумму I0 и -I2’. Вектор U1 строим, добавляя к вектору –E1 падение напряжения I1r1 параллельно вектору I1, затем откладываем jI1x1 и получаем вектор I1Z1, который складываем с –E1 и в итоге получаем U1. Так как асинхронный двигатель в данном случае можно рассматривать как трансформатор, работающий на активную нагрузку, то вектор –I2’r2’(1-s)/s откладываем под тем же углом, что и I2', затем прибавляем к нему –I2’r2’ и –jI2’x2, получаем вектор –I2’Z2. 27.вопрос Электромеханическая (скоростная) и механическая характеристики асинхроннй машины Механическая характеристика. Зависимость частоты вращения ротора от нагрузки (вращающегося момента на валу) называется механической характеристикой асинхронного двигателя (рис. 262, а). При номинальной нагрузке частота вращения для различных двигателей обычно составляет 98—92,5 % частоты вращения n1 (скольжение sном = 2 – 7,5 %). Чем больше нагрузка, т. е. вращающий момент, который должен развивать двигатель, тем меньше частота вращения ротора. Как показывает кривая 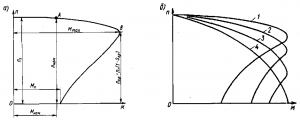 Рис. 262. Механические характеристики асинхронного двигателя: а — естественная; б — при включении пускового реостата Рис. 262. Механические характеристики асинхронного двигателя: а — естественная; б — при включении пускового реостатана рис. 262, а, частота вращения асинхронного двигателя лишь незначительно снижается при увеличении нагрузки в диапазоне от нуля до наибольшего ее значения. Поэтому говорят, что такой двигатель обладает жесткой механической характеристикой. Наибольший вращающий момент Mmax двигатель развивает при некоторое скольжении skp, составляющем 10—20%. Отношение Mmax/Mном определяет перегрузочную способность двигателя, а отношение Мп/Мном — его пусковые свойства. Двигатель может устойчиво работать только при обеспечении саморегулирования, т. е. автоматическом установлении равновесия между приложенным к валу моментом нагрузки Мвн и моментом М, развиваемым двигателем. Этому условию соответствует верхняя часть характеристики до достижения Mmax (до точки В). Если нагрузочный момент Мвн превысит момент Mmax, то двигатель теряет устойчивость и останавливается, при этом по обмоткам машины будет длительно проходить ток в 5—7 раз больше номинального, и они могут сгореть. При включении в цепь обмоток ротора пускового реостата получаем семейство механических характеристик (рис. 262,б). Характеристика 1 при работе двигателя без пускового реостата называется естественной. Характеристики 2, 3 и 4, получаемые при подключении к обмотке ротора двигателя реостата с сопротивлениями R1п (кривая 2), R2п (кривая 3) и R3п (кривая 4), называют реостатными механическими характеристиками. При включении пускового реостата механическая характеристика становится более мягкой (более крутопадающей), так как увеличивается активное сопротивление цепи ротора R2 и возрастает sкp. При этом уменьшается пусковой ток. Пусковой момент Мп также зависит от R2. Можно так подобрать сопротивление реостата, чтобы пусковой момент Мп был равен наибольшему Мmax. В двигателе с повышенным пусковым моментом естественная механическая характеристика приближается по своей форме к характеристике двигателя с включенным пусковым реостатом. Вращающий момент двигателя с двойной беличьей клеткой равен сумме двух моментов, создаваемых рабочей и пусковой клетками. Поэтому характеристику 1 (рис. 263) можно получить путем суммирования характеристик 2 и 3, создаваемых этими клетками. Пусковой момент Мп такого двигателя значительно больше, чем момент М’п обычного короткозамкнутого двигателя. Механическая характеристика двигателя с глубокими пазами такая же, как и у двигателя с двойной беличьей клеткой. Рабочие характеристики.Рабочими характеристиками асинхронного двигателя называются зависимости частоты вращения n (или скольжения s), момента на валу М2, тока статора I1коэффициента полезного действия ? и cos?1, от полезной мощности Р2 = Рmx при номинальных значениях напряжения U1 и частоты f1 (рис. 264). Они строятся только для зоны практической устойчивой работы двигателя, т. е. от скольжения, равного нулю, до скольжения, превышающего номинальное на 10—20%. Частота вращения n с ростом отдаваемой мощности Р2 изменяется мало, так же как и в механической характеристике; вращающий момент на валу М2 пропорционален мощности Р2, он меньше электромагнитного момента М на значение тормозящего момента Мтр, создаваемого силами трения. Ток статора I1, возрастает с увеличением отдаваемой мощности, но при Р2 = 0 имеется некоторый ток холостого хода I0. К. п. д. изменяется примерно так же, как и в трансформаторе, сохраняя достаточно большое значение в сравнительно широком диапазоне нагрузки. Наибольшее значение к. п. д. для асинхронных двигателей средней и большой мощности составляет 0,75—0,95 (машины большой мощности имеют соответственно больший к. п. д.). Коэффициент мощности cos?1 асинхронных двигателей средней и большой мощности при полной нагрузке равен 0,7—0,9. Следовательно, они загружают электрические станции и сети значительными реактивными токами (от 70 до 40% номинального тока), что является существенным недостатком этих двигателей. 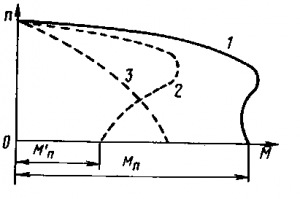 Рис. 263. Механическая характеристика асинхронного двигателя с повышенным пусковым моментом (с двойной беличьей клеткой) Рис. 263. Механическая характеристика асинхронного двигателя с повышенным пусковым моментом (с двойной беличьей клеткой)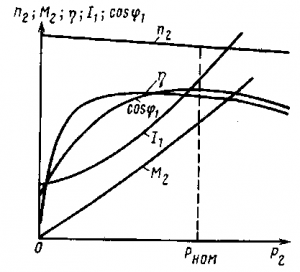 Рис. 264. Рабочие характеристики асинхронного двигателя Рис. 264. Рабочие характеристики асинхронного двигателяПри нагрузках 25—50 % номинальной, которые часто встречаются при эксплуатации различных механизмов, коэффициент мощности уменьшается до неудовлетворительных с энергетической точки зрения значений (0,5—0,75). При снятии нагрузки с двигателя коэффициент мощности уменьшается до значений 0,25—0,3, поэтомунельзя допускать работу асинхронных двигателей при холостом ходе и значительных недогрузках. Электромеханическая Для АД существуют два типа характеристик: Уравнение для второй электромеханической характеристики уже получено ранее в виде (8.13). Ток ротора Ввиду отсутствия подробных данных о сопротивлениях двигателя, для построения электромеханической характеристики удобно воспользоваться параметрами, используемыми для построения механических характеристик двигателя поформуле Клосса (8.18). Для анализа формы электромеханической характеристики ее уравнение (без вывода) можно представить в виде [1,2] Из формулы (8.20) видим, что ток ротора интенсивно растет при увеличении скольжения от нуля до Sк. При S=Sк  Рис. 8.4. Электромеханические характеристики АД Для схемы замещения с вынесенным на зажимы сети контуром намагничивания ток намагничивания Iμ сохраняется неизменным во всех режимах. С достаточной степенью точности его можно считать чисто реактивным, пренебрегая потерями мощности на перемагничивание стали статора. Ток где Для выпускающих промышленностью машин значение Необходимо обратить внимание, что при одинаковых значениях скольжения ток ротора в двигательном режиме меньше тока в генераторном режиме. 28.вопрос Пуск асинхронных двигателей ПУСК АСИНХРОННЫХ ДВИГАТЕЛЕЙ Способы пуска. При пуске двигателя по возможности должны удовлетворяться основные требования: процесс пуска должен осуществляться без сложных пусковых устройств; пусковой момент должен быть достаточно большим, а пусковые токи - по возможности малыми. Иногда к этим требованиям добавляют и другие, обусловленные особенностями конкретных приводов, в которых используют двигатели: необходимость плавного пуска, максимального пускового момента и пр. Практически используют следующие способы пуска: непосредственное подключение обмотки статора к сети (прямой пуск); понижение напряжения, подводимого к обмотке статора при пуске; подключение к обмотке ротора пускового реостата. Прямой пуск. Этот способ применяют для пуска асинхронных двигателей с короткозамкнутым ротором. Двигатели этого типа малой и средней мощности обычно проектируют так, чтобы при непосредственном подключении обмотки статора к сети возникающие пусковые токи не создавали чрезмерных электродинамических усилий и превышений температуры, опасных с точки зрения механической и термической прочности основных элементов машины. В асинхронных двигателях отношение L/R сравнительно мало (особенно в малых двигателях), поэтому переходный процесс в момент включения характеризуется весьма быстрым затуханием свободного тока. Это позволяет пренебречь свободным током и учитывать только установившееся значение тока переходного процесса. Двигатели обычно пускают с помощью электромагнитного выключателя К - магнитного пускателя (рис. 4.27, а) и разгоняют автоматически по естественной механической характеристике М (рис. 4.27,6) от точки П, соответствующей начальному моменту пуска, до точки Р, соответствующей условию М = Мст. Ускорение при разгоне определяется разностью абсцисс кривых М и Мст и моментом инерции ротора двигателя и механизма, который приводится во вращение. Если в начальный момент пуска Мп < Мст , двигатель разогнаться не сможет.
Значение начального пускового момента можно получить из формулы (4.46а), приняв s = 1: (4.58) Мп = m1 U12R'2 /{w1 [(R1 + R'2 )2 + (X1 + Х'2 )2 ]}. Отношение моментов Мп /Мном = kп.м называют кратностью начального пускового момента. Для двигателей с короткозамкнутым ротором мощностью 0,6—100 кВт ГОСТом установлено kп.м= 1,0÷2,0; мощностью 100-1000 кВт - kп.м = 0,7÷1,0. Получение кратностей пускового момента, больших регламентированных ГОСТом, обычно нежелательно, так как это связано либо с увеличением активного сопротивления ротора (см. 4.58), либо с изменением конструкции ротора (см. § 4.11), что ухудшает энергетические показатели двигателя. Недостатком данного способа пуска кроме сравнительно небольшого пускового момента является также большой бросок пускового тока, в пять — семь раз превышающий номинальное значение тока. Несмотря на указанные недостатки, пуск двигателя путем непосредственного подключения обмотки статора к сети широко применяют благодаря простоте и хорошим технико-экономическим свойствам двигателя с короткозамкнутым ротором — низкой стоимости и высоким энергетическим показателям (η, cos φ1, kм и др.). Пуск при пониженном напряжении. Такой пуск применяют для асинхронных двигателей с короткозамкнутым ротором большой мощности, а также для двигателей средней мощности при недостаточно мощных электрических сетях. Понижение напряжения может осуществляться следующими путями: а) переключением обмотки статора с помощью переключателя с нормальной схемы Δ на пусковую схему Y. При этом напряжение, подаваемое на фазы обмотки статора, уменьшается в √3 раз, что обусловливает уменьшение фазных токов в √3 раз и линейных токов в 3 раза. По окончании процесса пуска и разгона двигателя до номинальной частоты вращения обмотку статора переключают обратно на нормальную схему;
б) включением в цепь обмотки статора на период пуска добавочных активных (резисторов) или реактивных (реакторов) сопротивлений (рис. 4.28, а). При этом на указанных сопротив лениях создаются некоторые падения напряжения ΔUдоб, пропорциональные пусковому току, вследствие чего к обмотке статора подается пониженное напряжение. По мере разгона двигателя снижается ЭДСЕ2s , индуцированная в обмотке ротора, а следовательно, и пусковой ток. В результате уменьшается падение напряжения ΔUдоб на указанных сопротивлениях и автоматически возрастает приложенное к двигателю напряжение. После окончания разгона добавочные резисторы или реакторы замыкаются накоротко контактором К1 ; в) подключением двигателя к сети через понижающий автотрансформаторАТр (рис. 4.28,6), который может иметь несколько ступеней, переключаемых в процессе пуска соответствующей аппаратурой. Недостатком указанных методов пуска путем понижения напряжения является значительное уменьшение пускового и максимального моментов двигателя, которые пропорциональны квадрату приложенного напряжения, поэтому их можно использовать только при пуске двигателей без нагрузки.
На рис. 4.29 для примера приведены механические характеристики двигателя при номинальном и пониженном напряжении, т. е. при соединении обмотки статора по схемам Y и Δ, атакже графики изменения тока I1 и момента М при пуске двигателя путем переключения обмотки статора со Y на Δ. Присоединении по схеме Y максимальный и пусковой момент уменьшаются в три раза, вследствие чего двигатель не в состоянии осуществить пуск механизма с нагрузочным моментом Мн. Пуск с помощью реостата в цепи ротора. Этот способ применяют для пуска двигателей с фазным ротором. Если в цепь ротора включить пусковой реостат Rп, то активное сопротивление цепи ротора увеличится, вследствие чего точка К на круговой диаграмме (рис. 4.30, а) сместится ближе к точке О (точка К'). При этом максимальный момент (отрезок АмЕм) не изменяется, а пусковой момент возрастает от значения Мп до М'п, так как увеличивается отрезок КЕп, пропорциональный этому моменту. Одновременно повышается критическое скольжение, а поэтому зависимость М =f(s) сдвигается в область больших скольжений, а зависимость п2= f(М) — в область меньших частот вращения (рис. 4.30,6 и в, кривые 1—4). Для того чтобы пусковой момент был равен максимальному, необходимо так подобрать сопротивление пускового реостата Rп, чтобы точка К' находилась вблизи точки Ам. Это условие выполняется при R'п + R'2 + R1 ≈ X1 + X'2 . Включение сопротивления R пуменьшает также и пусковой ток двигателя, так как в этом случае (4.59) In = U1 /√(R'n + R'2+ R1 )2 + (X1 + Х'2 )2. Пусковой реостат имеет обычно три — шесть ступеней (рис. 4.31, а), что позволяет в процессе пуска постепенно уменьшать пусковое сопротивление, поддерживая высокое значение пуско-вого момента двигателя. Сначала двигатель пускается по характеристике 4 (рис. 4.31,6), соответствующей сопротивлению
|