Конструкция трансформаторов Трансформатор представляет собой линейный электромагнитный аппарат
 Скачать 1.16 Mb. Скачать 1.16 Mb.
|

|
пускового реостата Rп3 = Rдоб1 + Rдоб2 + Rдоб3 , и развивает вращающий момент Мп.mах . По мере увеличения частоты вращения вращающий момент М уменьшается и может стать меньше некоторого момента Mп.min . Поэтому при M = Mп.min часть пускового реостата Rдоб3 выводят, замыкая контактор КЗ . Вращающий момент при этом мгновенно возрастает до Мп.mах , а затем с увеличением частоты вращения изменяется по характеристике 3, соответствующей сопротивлению реостата Rп2 = Rдоб1 + Rдоб2 . При дальнейшем уменьшении момента М до Mп.minчасть реостата Rдоб2 снова выключается контактором К2 и двигатель переходит на работу по характеристике 2, соответствующей сопротивлению Rп1 = Rдоб1 . Таким образом, при постепенном (ступенчатом) уменьшении сопротивления пускового реостата вращающий момент двигателя изменяется от Мп.mах до Mп.min , а частота вращения возрастает по ломаной кривой, показанной на рис. 4.31,6 жирной линией. В конце пуска пусковой реостат полностью выводят контактором К1, обмотка ротора замыкается накоротко, и двигатель переходит на работу по естественной характеристике 1. Выключение отдельных ступеней пускового реостата в процессе разгона двигателя может осуществляться вручную или автоматически. Таким образом, посредством реостата, включенного в цепь ротора, можно осуществить пуск двигателя при Mп ≈ Мmах и резко уменьшить пусковой ток. На рис. 4.31, в показан характер изменения тока I1 и частоты вращения n2 при пуске двигателя рассматриваемым способом. Ток также изменяется по ломаной кривой между двумя крайними значениями Imах и Imin. Недостатком данного способа является его относительная сложность и необходимость применения более дорогих двигателей с фазным ротором. Кроме того, указанные двигатели имеют несколько худшие рабочие характеристики, чем двигатели с короткозамкнутым ротором такой же мощности (кривые η и cos φ1 проходят ниже). В связи с этим двигатели с фазным ротором применяют только при тяжелых условиях пуска, когда необходимо развивать максимально возможный пусковой момент. 29.вопрос Регулирование частоты вращения асинхронного двигателя Частота вращения асинхронного двигателя n = n1(1 – s) = (60f1/p) (1-s) (85) Из этого выражения видно, что ее можно регулировать, изменяя частотуf1 питающего напряжения, число пар полюсов р и 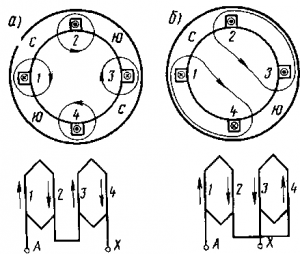 Рис. 266. Схема переключения катушек обмотки статора (одной фазы) для изменения числа полюсов: а — при четырех полюсах; б — при двух полюсах Рис. 266. Схема переключения катушек обмотки статора (одной фазы) для изменения числа полюсов: а — при четырех полюсах; б — при двух полюсахскольжение s. Последнее при заданных значениях момента на валу Мвн и частоты f1 можно изменять путем включения в цепь обмотки ротора реостата. Регулирование путем изменения частоты питающего напряжения.Этот способ требует наличия преобразователя частоты, к которому должен быть подключен асинхронный двигатель. На основе управляемых полупроводниковых вентилей (тиристоров) созданы статические преобразователи частоты и построен ряд опытных электровозов и тепловозов с асинхронными двигателями, частота вращения которых регулируется путем изменения частоты питающего напряжения. Такой способ регулирования частоты вращения ротора асинхронного двигателя является весьма перспективным. Регулирование путем изменения числа пар полюсов. Этот способ позволяет получить ступенчатое изменение частоты вращения. Для этой цели отдельные катушки 1, 2 и 3, 4, составляющие одну фазу (рис. 266), переключаются так, чтобы изменялось соответствующим образом направление тока в них (например, с последовательного согласного соединения на встречное). При согласном включении катушек (рис. 266, а) число полюсов равно четырем, при встречном включении (рис. 266, б) — двум. Катушки двух других фаз, сдвинутые в пространстве на 120°, соединяются таким же образом. Такое же уменьшение числа полюсов можно осуществить при переключении катушек с последовательного на параллельное соединение. При изменении числа полюсов изменяется частота вращения n1 магнитного поля двигателя, а следовательно, и частота вращения n его ротора. Если нужно иметь три или четыре частоты вращения n1, то на статоре располагают еще одну обмотку, при переключении которой можно получить еще две частоты. Существуют двигатели, которые обеспечивают изменение частоты вращения n1 при постоянном наибольшем моменте или при приблизительно постоянной мощности (рис. 267). В асинхронном двигателе число полюсов ротора должно быть равно числу полюсов статора. В короткозамкнутом роторе это условие выполняется автоматически и при переключении обмотки статора никаких изменений в обмотке ротора выполнять не требуется. 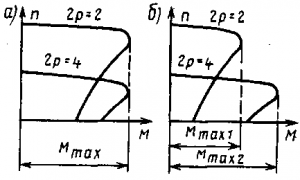 Рис. 267. Механические характеристики двухскоростных асинхронных двигателей с постоянным наибольшим моментом (а) и постоянной мощностью (б) Рис. 267. Механические характеристики двухскоростных асинхронных двигателей с постоянным наибольшим моментом (а) и постоянной мощностью (б)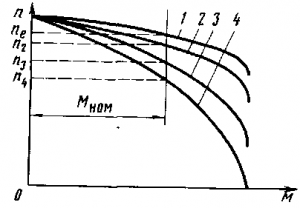 Рис. 268. Механические характеристики асинхронного двигателя при регулировании частоты вращения путем включения реостата в цепь обмотки ротора Рис. 268. Механические характеристики асинхронного двигателя при регулировании частоты вращения путем включения реостата в цепь обмотки ротора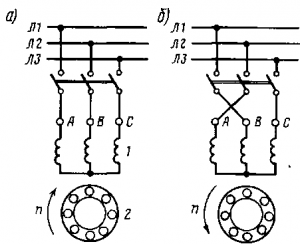 Рис. 269. Схемы подключения асинхронного двигателя к сети при изменении направления его вращения Рис. 269. Схемы подключения асинхронного двигателя к сети при изменении направления его вращенияВ двигателе же с фазным ротором в этом случае надо было бы изменять число полюсов обмотки ротора, что сильно усложнило бы его конструкцию, поэтому такой способ регулирования частоты вращения используется только в двигателях с коротко-замкнутым ротором. Такие двигатели имеют большие габаритные размеры и массу по сравнению с двигателями общего применения, а следовательно, и большую стоимость. Кроме того, регулирование осуществляется большими ступенями; при частоте f1 = 50 Гц частота вращения поля n1 при переключениях изменяется в отношении 3000:1500:1000:750. Регулирование путем включения в цепь ротора реостата. При включении в цепь обмотки ротора реостата с различным сопротивлением (Rп4, RпЗ, Rп2 и т. д.) получаем ряд реостатных механических характеристик 4, 3 и 2 двигателя. При этом некоторому нагрузочному моменту Мном (рис. 268) будут соответствовать меньшие частоты вращения n4, n3, n2 и т. д., чем частота nе при работе двигателя на естественной характеристике 1 (при Rп = 0). Это способ регулирования может быть использован только для двигателей с фазным ротором. Он позволяет плавно изменять частоту вращения в широких пределах. Недостатками его являются большие потери энергии в регулировочном реостате, поэтому его используют только при кратковременных режимах работы двигателя (при пуске и пр.). Изменение направления вращения.Для изменения направления вращения двигателя нужно изменить направление вращения магнитного поля, создаваемого обмотками статора. Это достигается изменением порядка чередования тока в фазах обмотки статора. Например, если максимумы токов поступают в фазы обмотки статора 1 (рис. 269, а) в следующем порядке: фаза А — фаза В — фаза С, то ротор 2 двигателя будет вращаться по часовой стрелке. Если же подавать их в такой последовательности: фаза В — фаза А — фаза С, то ротор начнет вращаться против часовой стрелки. Для этой цели необходимо изменить схему соединения обмоток статора с сетью, переключив две любые фазы (провода). Например, зажим А обмотки статора, который ранее был соединен с линейным проводом Л1, нужно переключить на провод Л2, а зажим В этой обмотки, соединенный ранее с Л2, переключить на провод Л1 (рис. 269,б). Такое переключение можно осуществить обычным переключателем. 30.вопрос Многоскоростные асинхронные двигатели
|