Контур регулирования уровня металла в промежуточном ковше мнлз
 Скачать 460.85 Kb. Скачать 460.85 Kb.
|

3 СТРУКТУРНАЯ СХЕМА САУ РЕГУЛИРОВАНИЯ УРОВНЯ ЖИДКОГО МЕТАЛЛА В ПРОМЕЖУТОЧНОМ КОВШЕЛюбой контур управления в обязательном порядке содержит объект управления, регулятор и механизм воздействия на управляемый объект. Заданием на курсовой проект был определен объект управления – интегральное звено и инерционное звено первого порядка. 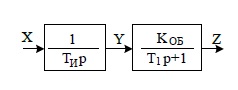 Рисунок 3.1 - Объект управления Передаточная функция такого объекта описывается уравнением вида  , ,То – постоянная времени объекта, с; τ – время запаздывания, c; В качестве регулятора для данного типа объекта выбираем пропорционально-интегральный регулятор (ПИ-регулятор), передаточная функция которого описывается уравнением вида:  где kр – коэффициент передачи регулятора; Тиз – время изодрома. Заданием определен исполнительный механизм постоянной скорости типа МЭО 100/63-0,25, описываемый передаточной функцией вида:  где Тим – время полного хода, или время перекладки исполнительного механизма от одного концевого выключателя до другого. Тим является настроечным параметром контура управления где Тим – время полного хода, или время перекладки исполнительного механизма от одного концевого выключателя до другого. Тим является настроечным параметром контура управления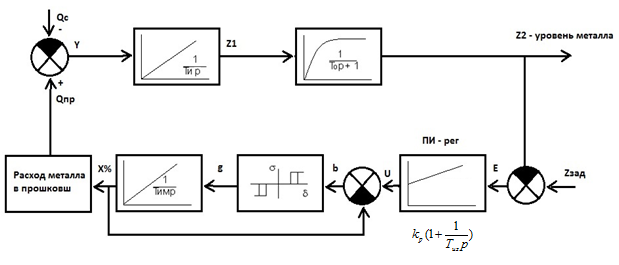 Рисунок 3.2 - Структурная схема контура управления. Объект управления, представляющий из себяинтегрирующее звено, инерционное звено первого порядка с запаздыванием, представлен в. Первое звено с постоянной времени, равной постоянной времени объекта, второе звено – с постоянной времени, равной времени запаздывания (в первом приближении звено запаздывания можно заменить инерционным звеном первого порядка). Сигнал с выхода объекта Z2 сравнивается с сигналом задания Zз. Разница ε=Zз-Z2 поступает на вход ПИ-регулятора. ПИ-регулятор отрабатывает сигнал рассогласования ɛ во времени, выставляя на выходе управляющее воздействие U, которое, после вычитания сигнала обратной связи, подается на вход релейного элемента. Наиболее правильно в качестве сигнала обратной связи по положению ИМ использовать сигнал КиТ. При значительных сигналах рассогласования и при начальном положении ИМ близким к нулевому (до 15%хода), можно при формировании сигнала ООС по положению ИМ использовать выражение Хн+КиТ .В проекте применялся первый вариант формирования отрицательной обратной связи (КиТ). Релейный элемент представляет собой трехпозиционное реле, которое переключается в зависимости от уровня сигнала ошибки, зоны нечувствительности ∆Zнч, являющейся настроечным параметром системы управления, а также значения переключающей функции в предыдущий момент времени. Варианты формирования значения переключающей функции на последующем шаге в зависимости от значения этой функции на предыдущем шаге представлены на рис. Зона нечувствительности релейного элемента ограничивает частоту перемещений исполнительного механизма, ухудшая при этом качество регулирования.  Рисунок 3.3 - Варианты формирования значения переключающей функции на последующем шаге в зависимости от значения этой функции на предыдущем шаге. В зависимости от сигнала на выходе реле исполнительный механизм: а) работает на увеличение выходной величины если σ=+1; б) неподвижен если σ=0; в) работает на уменьшение выходной величины если σ=-1. Исполнительный механизм рассматривается как интегрирующее звено, причем скорость исполнительного механизма обратно пропорциональна его постоянной времени:  Изменение средней скорости исполнительного механизма (уменьшение от максимально возможной) осуществляется с помощью импульсного коммутирующего устройства ИКУ. При программировании работы ИКУ необходимо учитывать следующие рекомендации: Продолжительность работы цикла расчета управляющего воздействия зависит от инерционных свойств объекта и не должна превышать 1-5с. При выборе продолжительности цикла расчета 1с. минимальное значение скорости ИМ не должно быть меньше 0,1Ким max. Минимально возможная продолжительность включения ИМ в пределах одного цикла расчета зависит от конструктивных особенностей ИМ и не должна быть меньше 0,1-0,15 с. |