ТАУ Краткий курс лекций. Курс лекций для студентов инженернотехнических специальностей заочного отделения
 Скачать 0.69 Mb. Скачать 0.69 Mb.
|

Общее описания и свойстваТиповые звенья описываются уравнением a0y''(t) + a1y'(t) + a2y(t) = b0x'(t) + b1x(t). (1) Принято приводить уравнение звена к стандартному виду в символической записи: где T22 =a0/a2; T1 = a1/a2; t =b0/b1 - постоянные времени; k = b1/a2. Вспомним, как можно получить характеристики звеньев: -статические, приравнивая производные по времени к нулю, -динамические: … . W(p) = R(p) /Q(p) =k(tp+1)/( T22 p2 +T1 p +1) , (2) Для получения переходной характеристики h(t) ищется общее решение, состоящее из двух частей. Импульсная характеристика является производной по времени от переходной характеристики w(t) = dh(t)/dt. Из общего вида уравнения или передаточной функции можно сделать некоторые выводы о свойствах звеньев. Если коэффициенты a2и b1 не равны нулю, то такие звенья называются статическими или позиционными, что говорит о наличии уравнения статики. В противном случае звенья являются астатическими n-го порядка, где n – это степень при операторе дифференцирования, характеризующего астатизм звена или системы. Ряд звеньев называются элементарными, а именно безынерционные, идеально дифференцирующие и идеально интегрирующие. виде 2. Обзор и примерыТаблица 3.1 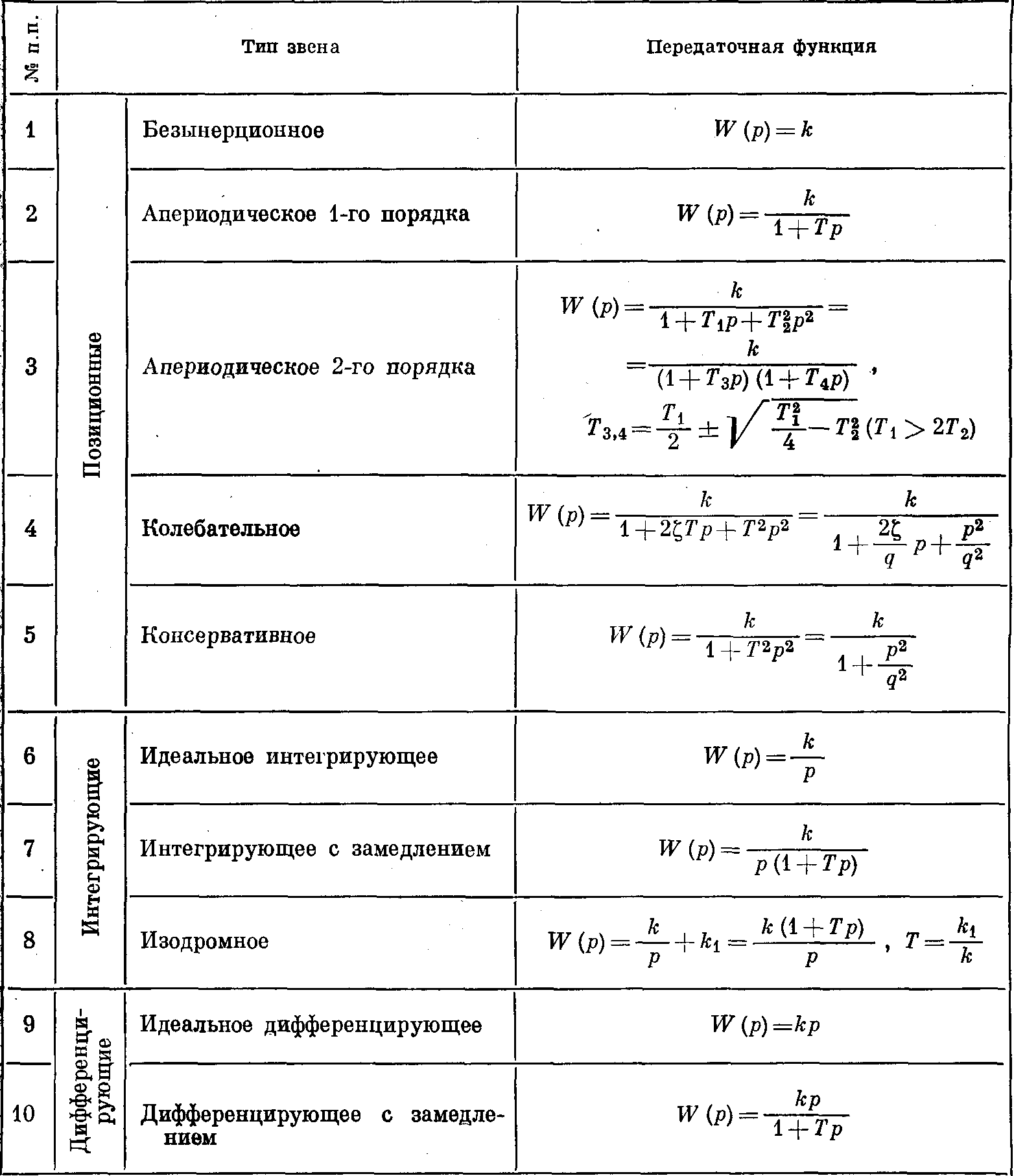 Таблица 3.2Временные характеристики позиционных звеньев 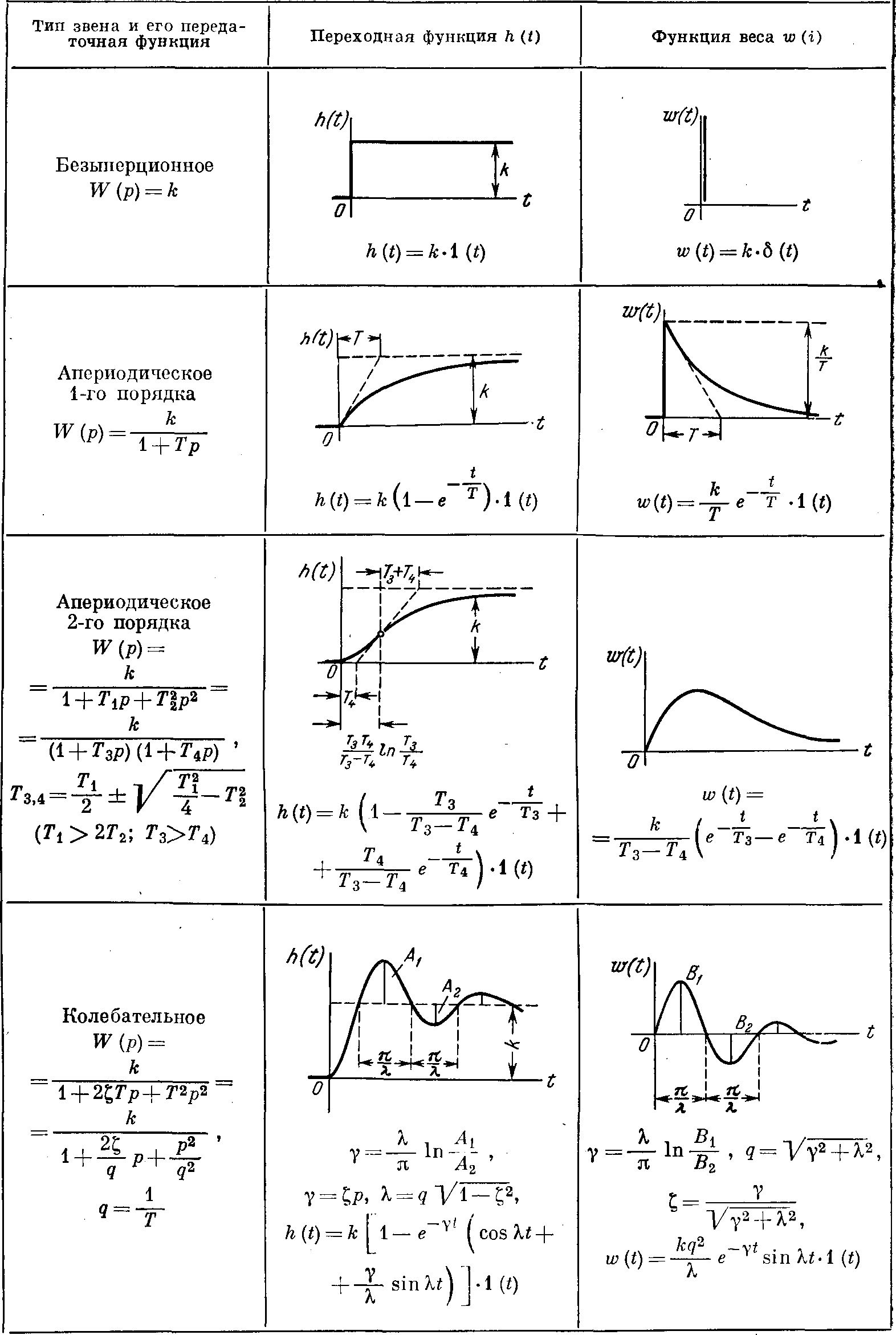 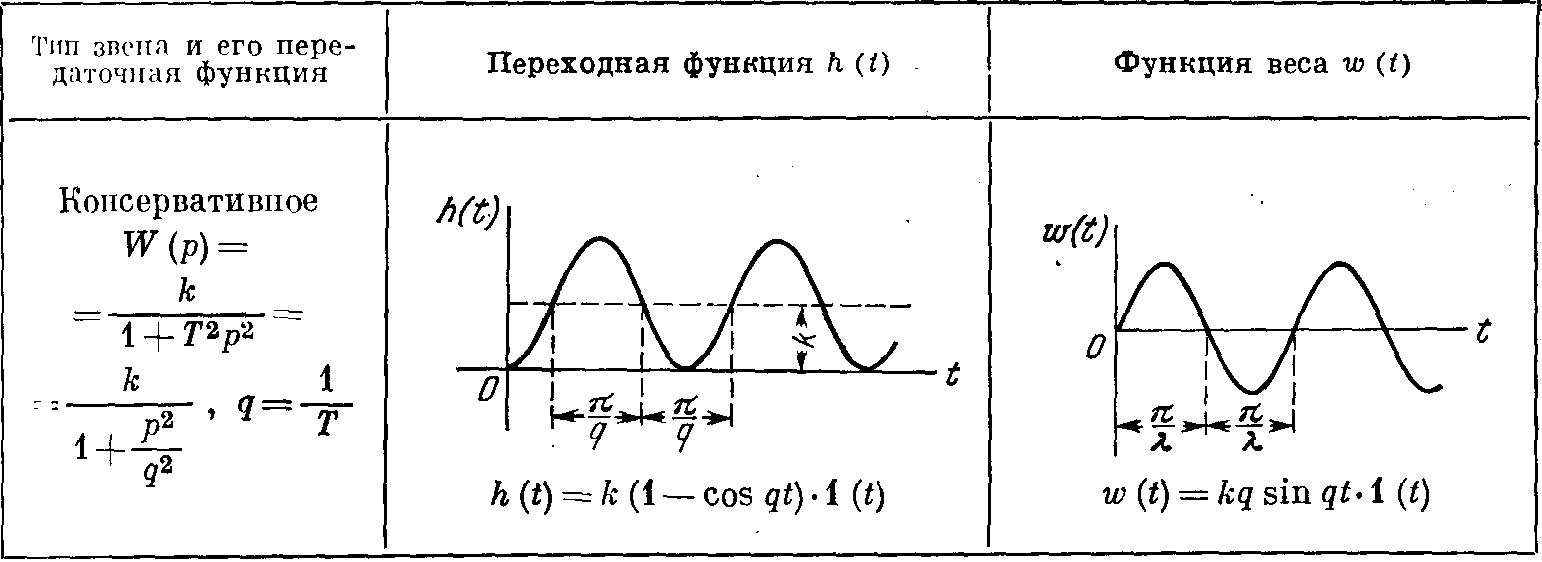 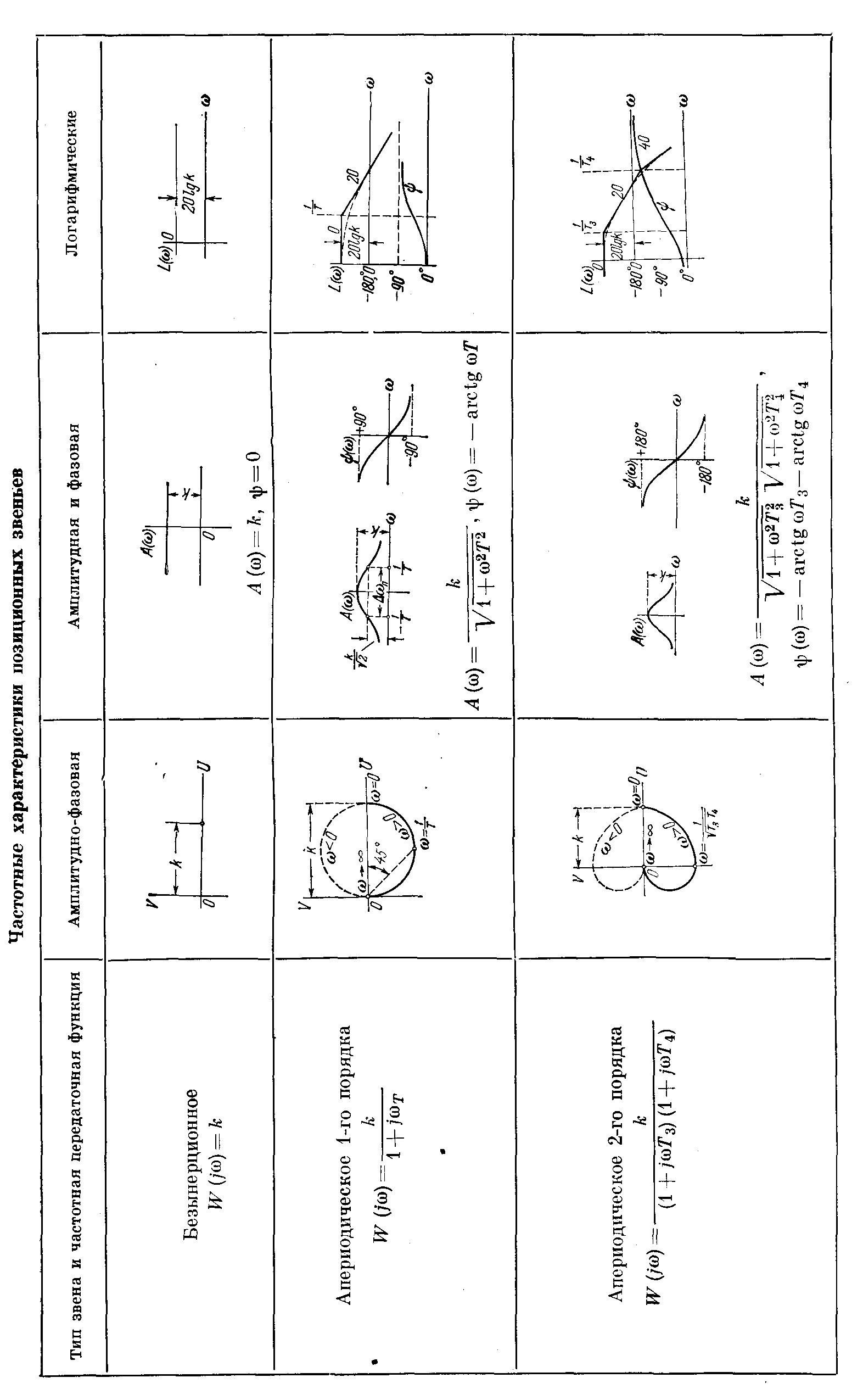 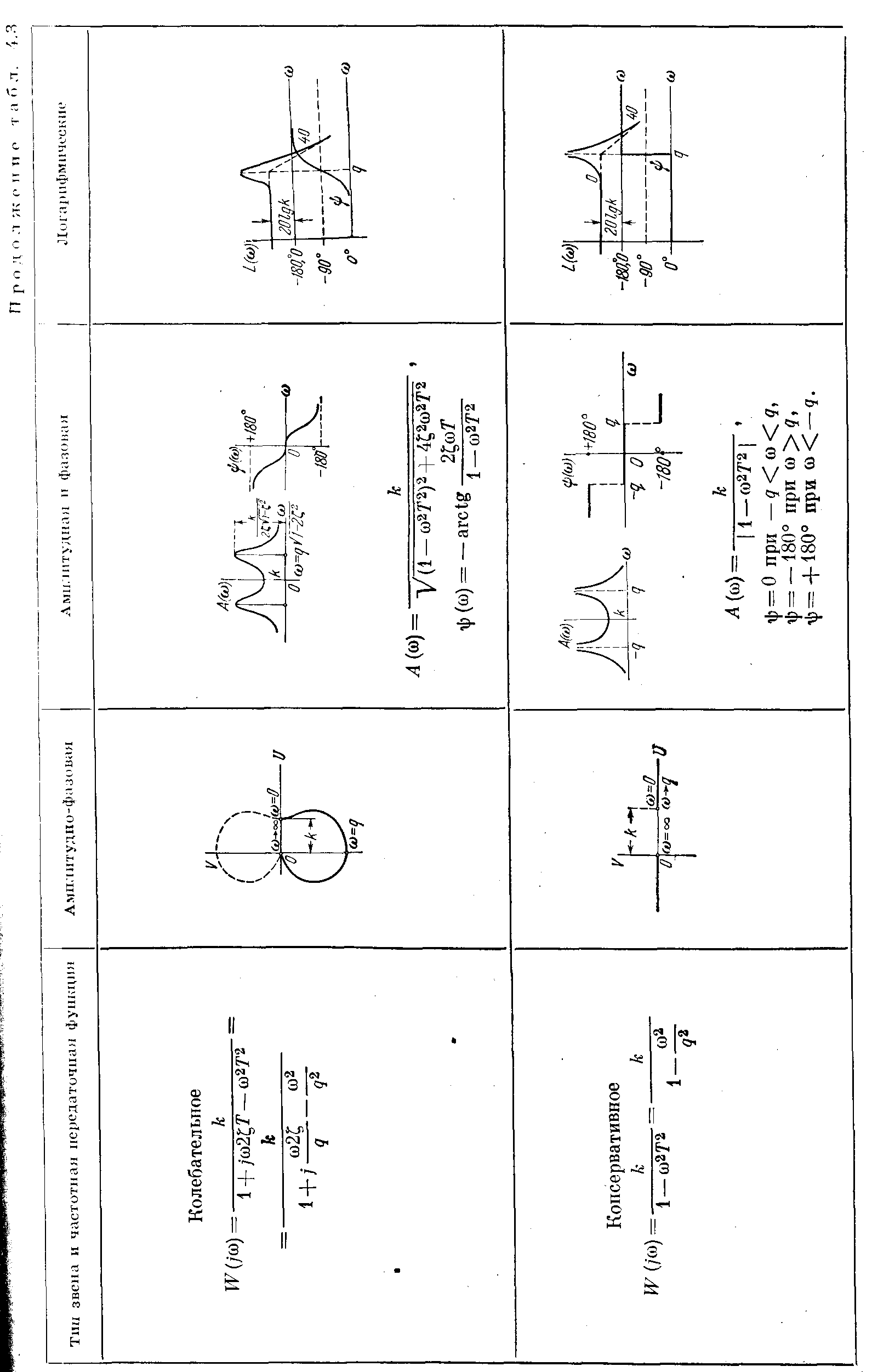 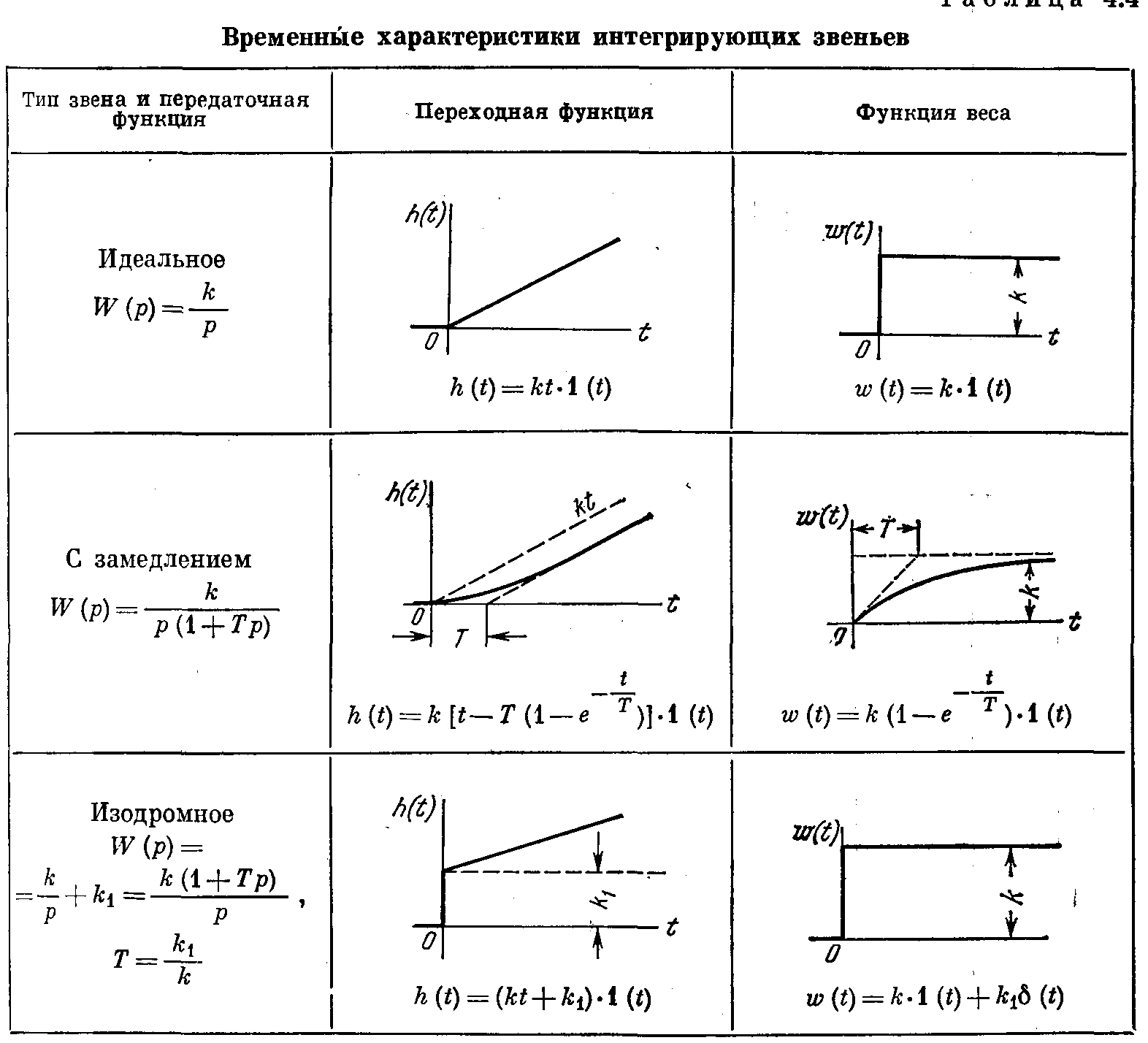 Таблица 3.6 Временные характеристики дифференцирующих звеньев 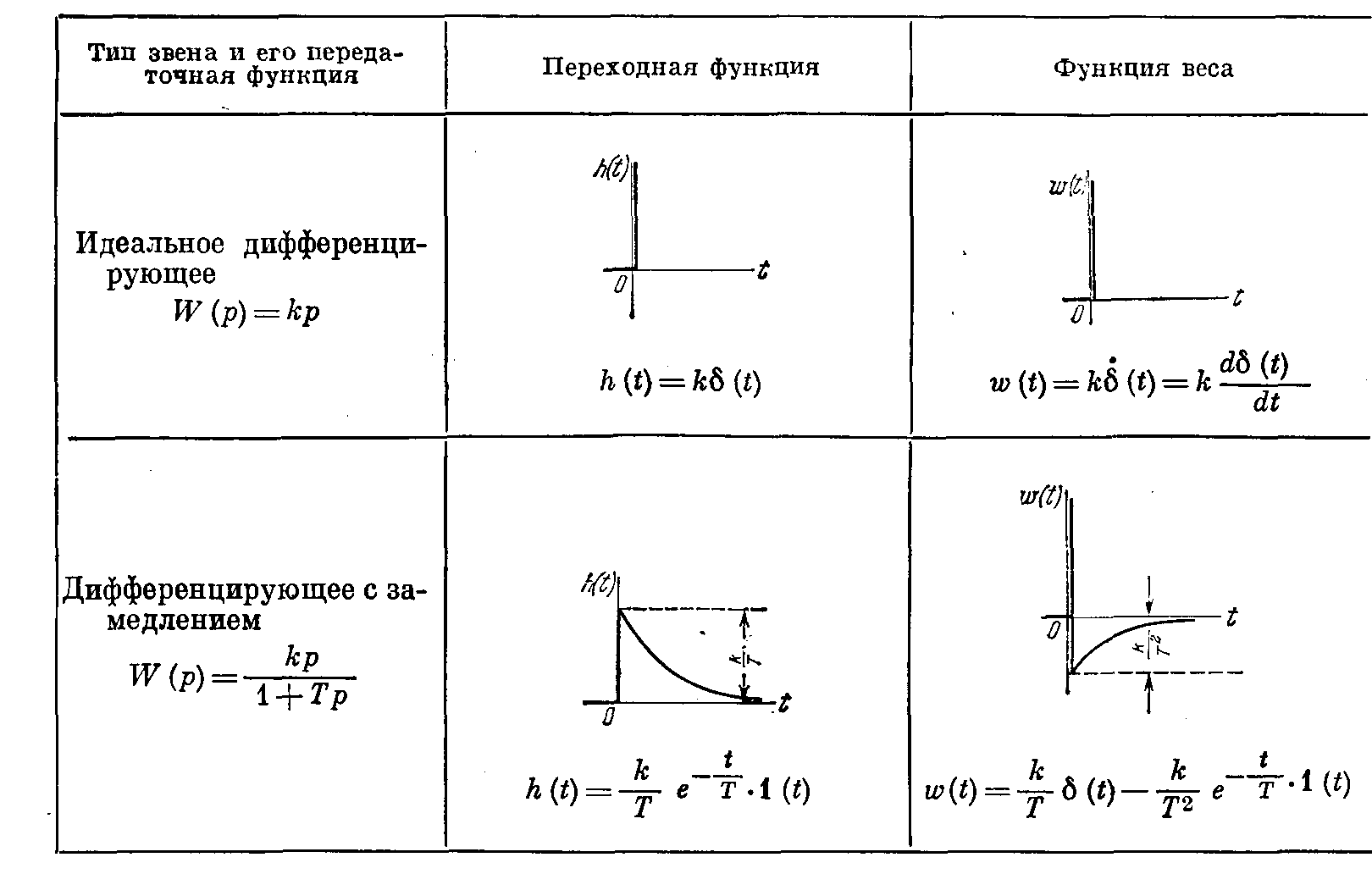 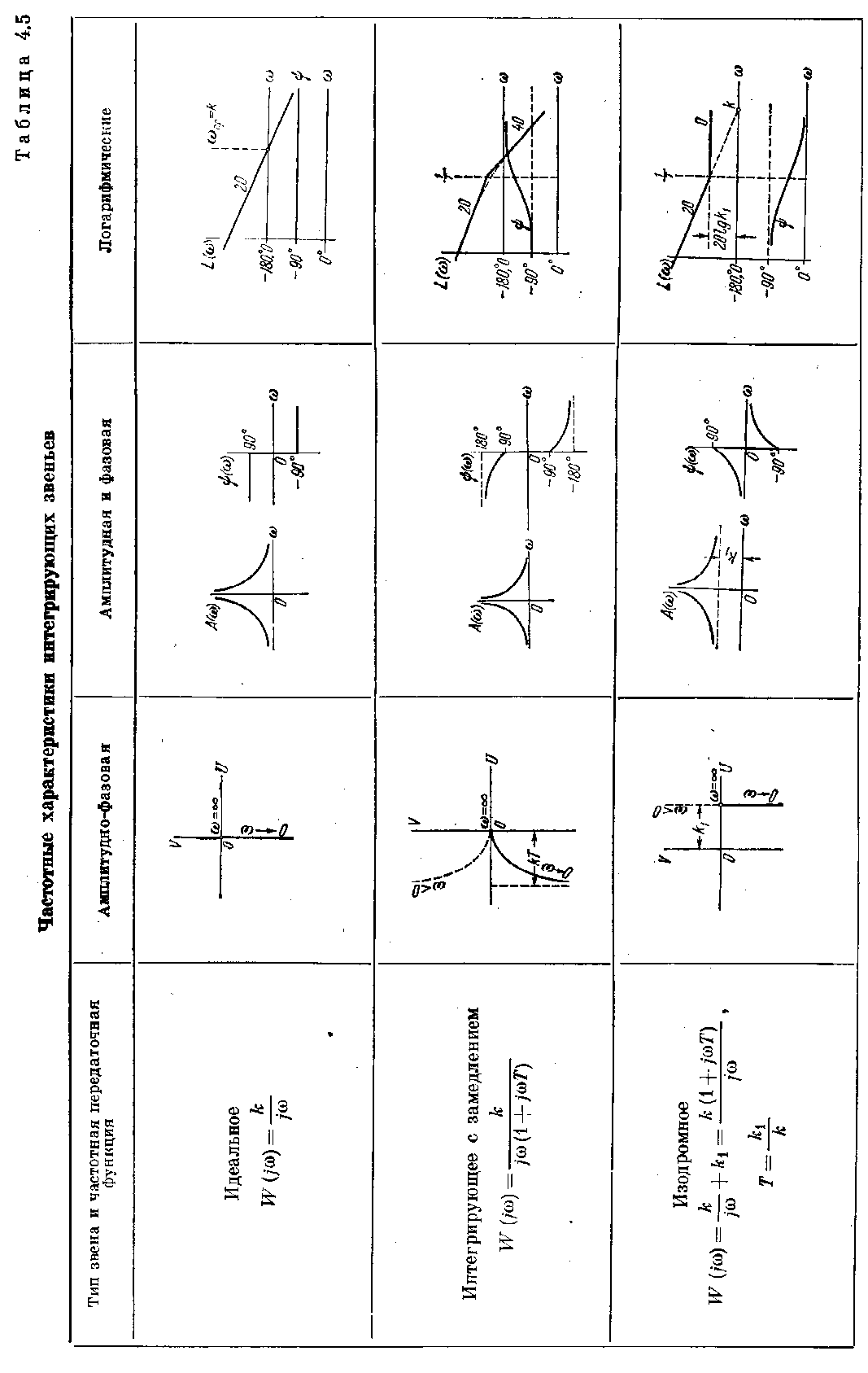 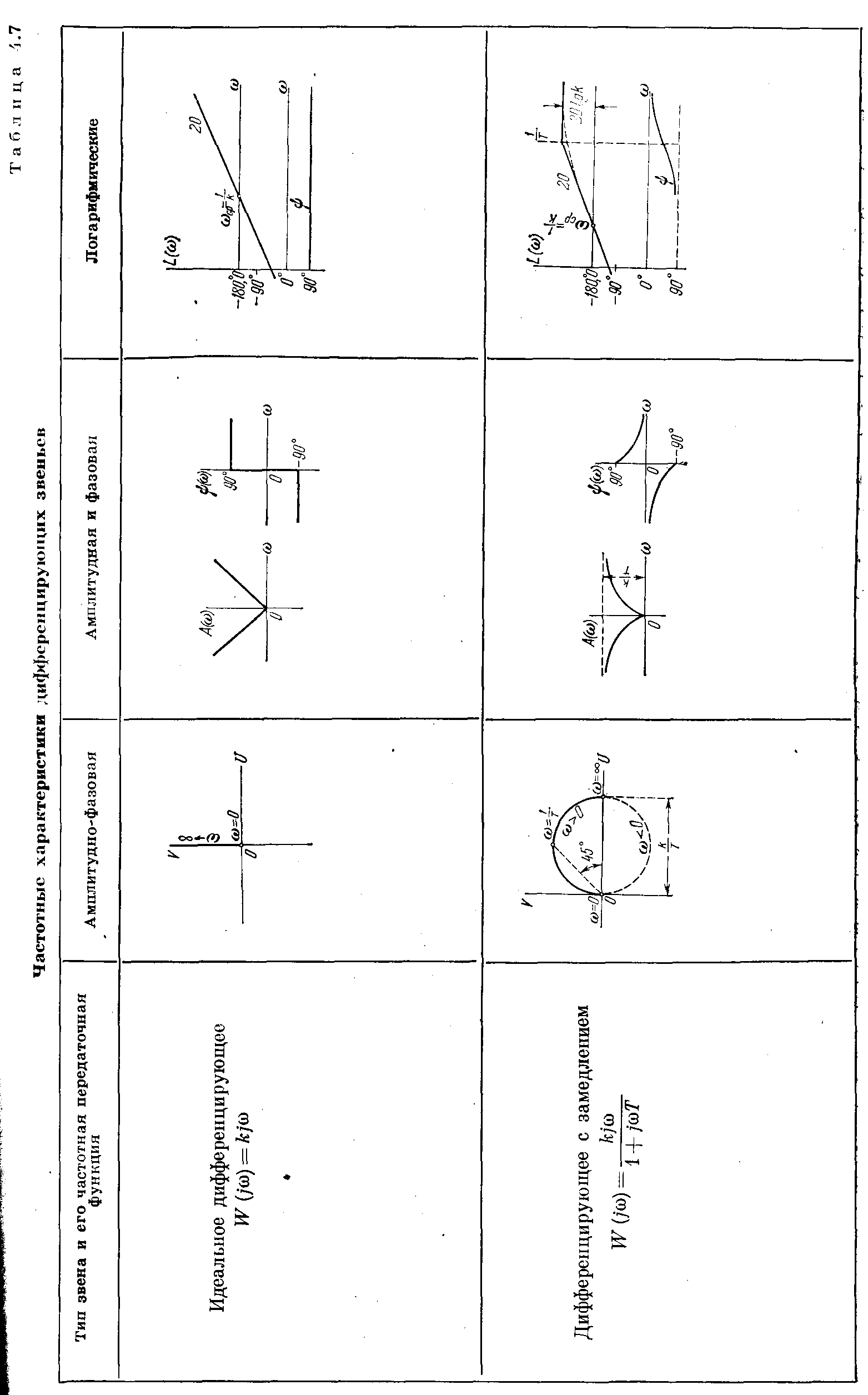 3. Применения звеньев   ЛЕКЦИЯ № 4 УСТОЙЧИВОСТЬ систем управления4.1. Понятие, виды и общее условие устойчивостиОдной из важнейших характеристик автоматической системы управления наряду с точностью является устойчивость. Причем, если показатели точности определяют степень полезности и эффективности системы, то от устойчивости зависит работоспособность системы. Поэтому проблема устойчивости систем является одной из центральных в теории автоматического управления. Раскроем физический смысл понятия «устойчивость». Устойчивость автоматической системы — это свойство системы возвращаться в исходное состояние равновесия после прекращения воздействия, выведшего систему из этого состояния. Неустойчивая система не возвращается в исходное состояние, а непрерывно удаляется от него. Неустойчивость автоматических систем управления возникает, как правило, из-за неправильного или очень сильного действия главной обратной связи. Неправильное действие главной обратной связи имеет место обычно в тех случаях, когда из-за ошибки, допущенной при монтаже системы, связь оказывается положительной (вместо отрицательной), что практически при любых параметрах делает систему неустойчивой. Возникающую при этом неустойчивость называют статической. Более сложным и более распространенным видом неустойчивости является динамическая неустойчивость. Она проявляется системах с отрицательной обратной связью, при достаточно большом значении передаточного коэффициента разомкнутого контура и при количестве инерционных звеньев, не меньшем трех. Причиной динамической неустойчивости обычно является значительная инерционность элементов замкнутого контура, из-за которой в режиме колебаний системы сигнал главной обратной связи значительно отстает от входного сигнала и оказывается с ним в фазе. Это означает, что связь, выполненная конструктивно как отрицательная (в статическом режиме!), в динамике (в режиме гармонических колебаний) проявляется на определенной частоте как положительная. Рассмотрим математическую сущность устойчивости и неустойчивости. Согласно данному выше физическому определению устойчивость зависит только от характера свободного движения системы. Свободное движение линейной или линеаризованной системы описывается однородным дифференциальным уравнением a0 х(n)(t)+ an-1 х(n-1)(t)+…+ a n-1 х¢(t)+ an х(t)= 0. (4.1) где х(t) = хc(t) — свободная составляющая выходной величины системы. Вынужденная составляющая выходной величины, зависящая от вида внешнего воздействия и правой части дифференциального уравнения, на устойчивость системы не влияет. Дадим математическое определение понятия «устойчивость». Система является устойчивой, если свободная составляющая хc(t) переходного процесса с течением времени стремится к нулю, т. е. если а если свободная составляющая неограниченно возрастает, т. е. если то система неустойчива. Наконец, если свободная составляющая не стремится ни к нулю, ни к бесконечности, то система находится на границе устойчивости. Очевидно, что при этом выходная величина системы будет стремиться к вынужденной составляющей, определяемой внешним воздействием и правой частью уравнения. Такую устойчивость принято называть асимптотической. Найдем общее условие, при котором система, описываемая уравнением (8.1), устойчива. Решение уравнения равно сумме где Ck — постоянные, зависящие от начальных условий; pk — корни характеристического уравнения a0 pn+ an-1 pn-1+…+ a n-1 p+ an = 0. (4.5) Корни характеристического уравнения могут быть действительными (pk=ak ), мнимыми (pk = jbk) и комплексными pk = ak + jbk , причем комплексные корни всегда попарно сопряжены между собой: если есть корень с положительной мнимой частью, то обязательно существует корень с такой же по модулю, но отрицательной мнимой частью. Переходная составляющая (8.4) при t®¥стремится к нулю лишь в том случае, если каждое слагаемое вида Сkеakt ®0. Характер этой функции времени зависит от вида корня рk. Рассмотрим все возможные случаи расположения корней рkна комплексной плоскости (рис. 8.1) и соответствующие им функции xk(t), которые показаны внутри кругов (как на экране осциллографа). 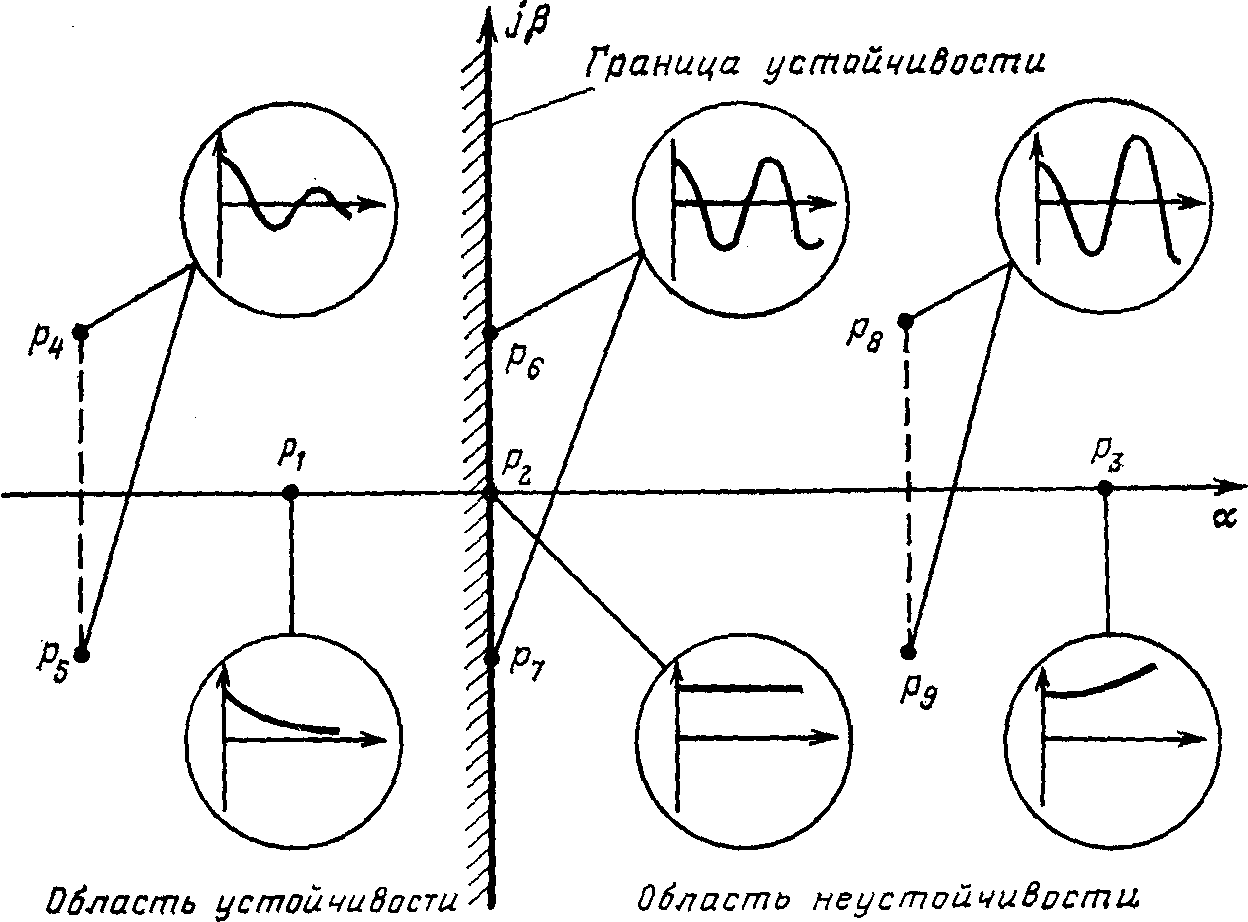 Рис. 4.1. Влияние корней характеристического уравнения системы на составляющие ее свободного движения 1. Каждому действительному корню рk = ak в решении (8.4) соответствует слагаемое вида xk(t) = Сkеakt. (4.6) Еслиak < 0 (корень р1), то функция (8.6) при t®¥ стремится к нулю. Если ak > 0 (корень р3), то функция неограниченно возрастаег. Если ak=0 (корень р2), то эта функция остается постоянной. 2. Каждой паре сопряженных комплексных корней pk = ak + jbk и pk = ak -jbk в решении (8.4) соответствуют два слагаемых, которые могут быть объединены в одно слагаемое xk(t) = Сkеakt sin(bkt + jk ). (4.7) Функция (8.7) представляет собой синусоиду с частотой bk и амплитудой, изменяющейся во времени по экспоненте. Если действительная часть двух комплексных корней ak (см. рис. 4.1, корни р4 и р5) то колебательная составляющая (8.7) будет затухать. Если ak > 0 (корни р8 и р9), то амплитуда колебаний будет неограниченно возрастать. Наконец, если ak == 0 (корни р6 и р7), т. е. если оба сопряженных корня —мнимые (pk = jbk , pk = -jbk ), то xk(t) представляет собой незатухающую синусоиду с частотой bk. Если среди корней характеристического уравнения (4.5) имеются l равных между собой корней pl, то в решении (8.4) вместо l слагаемых вида Сkеakt появится одна составляющая (C0 + C1t +C2t2 +…+ a l-1tl-1) Учитывая, что функция вида е-bt при любом b убывает быстрее, чем возрастают слагаемые вида tr, можно доказать, что и в случае кратности корней решение (4.4) будет стремиться к нулю лишь при отрицательности действительной части кратных корней pl. На основании проведенного анализа можно сформулировать общее условие устойчивости: для устойчивости линейной автоматической системы управления необходимо и достаточно, чтобы действительные части всех корней характеристического уравнения системы были отрицательными. Если хотя бы один корень имеет положительную действительную часть, то система будет неустойчивой. Устойчивость системы зависит только от вида корней характеристического уравнения и не зависит от характера внешних воздействий на систему. Устойчивость есть внутреннее свойство системы, присущее ей вне зависимости от внешних условий. Используя геометрическое представление корней на комплексной плоскости (см. рис. 4.1) в виде векторов или точек, можно дать вторую формулировку общего условия устойчивости (эквивалентную основной): для устойчивости линейной системы необходимо и достаточно, чтобы все корни характеристического уравнения находились в левой полуплоскости. Мнимая ось jb является границей устойчивости в плоскости корней. Если характеристическое уравнение имеет одну пару чисто мнимых корней (pk=+jb , pk+i= -jbk ), а все остальные корни находятся в левой полуплоскости, то в системе устанавливаются незатухающие гармонические колебания с круговой частотой w = |bk|. В этом случае говорят, что система находится на колебательной границе устойчивости. Точка b = 0 на мнимой оси соответствует так называемому нулевому корню. Если уравнение имеет один нулевой корень, то система находится на апериодической границе устойчивости. Если таких корня два, то система неустойчива. Не следует забывать, что линейные уравнения реальных систем типа (4.1), как правило, получаются в результате упрощений и линеаризации исходных нелинейных уравнений. Возникает вопрос: в какой мере оценка устойчивости по линеаризованному уравнению будет справедлива для реальной системы, не окажут ли существенное влияние на результат анализа отброшенные при линеаризации члены разложения? Ответ на него был дан русским математиком А. М. Ляпуновым в 1892 г. в работе «Общая задача об устойчивости движения». Он сформулировал и доказал следующую теорему: если характеристическое уравнение линеаризованной системы имеет хотя бы один нулевой корень или одну пару мнимых корней, то судить об устойчивости реальной системы по линеаризованному уравнению нельзя. Таким образом, для суждения об устойчивости линейной системы достаточно определить лишь знаки действительных частей корней характеристического уравнения. В теории автоматического управления разработан ряд правил, с помощью которых можно судить о знаках корней, не решая характеристическое уравнение и не находя числовые значения самих корней. Эти правила называются критериями устойчивости. Критерии устойчивости могут быть алгебраическими и частотными. Алгебраические критерии устанавливают необходимые и достаточные условия отрицательности корней в форме ограничений, накладываемых на определенные комбинации коэффициентов характеристического уравнения. Частотные критерии определяют связь между устойчивостью системы и формой частотных характеристик системы. При анализе устойчивости систем управления обычно решают одну или несколько задач:
3) выясняют, может ли система при заданной структуре быть в принципе устойчивой. |