ТММ курсовая. вариант12 курсовая. Курсовая работа (курсовой проект) по учебному курсу Теория механизмов и машин Вариант 12 Студент
 Скачать 0.62 Mb. Скачать 0.62 Mb.
|

Описание построения плана скоростейУгловую скорость звена 1 можно найти по следующей формуле:
где ω1 – угловая скорость звена 1, рад/с; nAB – частота вращения кривошипа AB, об/мин;
Определим величину скорости точки B по формуле:
где vB – скорость точки B кривошипа, м/с; ω1 – угловая скорость звена 1, рад/с; rAB – длина кривошипа по заданию, м.
Рассчитаем масштабный коэффициент плана скоростей по формуле:
где µv - масштабный коэффициент скорости, м∙с-1/мм; vB – скорость точки B кривошипа, м/с; pvb – длина вектора pvb на плане скоростей, мм. Принимаем величину вектора pvb=60,9 мм. Тогда масштаб:
Изображаем на плане вектор pvb, направленный перпендикулярно звену AB, в сторону вращения кривошипа. Точка pv – произвольная точка на плоскости, являющаяся полюсом плана скорости. В полюсе плана скорости располагаются точки механизма, скорости которых равны нулю. В нашем случае – это точка A. Звено BC совершает плоско-параллельное движение, поэтому скорость точки C определяется как векторная сумма переносной скорости точки B (  ) и относительной скорости точки C ( ) и относительной скорости точки C ( ): ):
Вектор скорости направлен перпендикулярно звену BC.Векторное уравнение (15) решаем графически, выполняя на чертеже следующие построения. Проводим через точку b прямую линию, перпедикулярно звену BC, и через полюс pv – прямую, параллельную направляюще движения ползуна 3, т.е. в нашем случае параллельно оси y. На пересечении этих двух прямых будет находиться точка c. Соединяя полюс плана скорости pv с точкой c, получаем вектор скорости точки C (  ), направленный от полюса к точке c. ), направленный от полюса к точке c.На отрезке bc будет находиться вектор относительной скорости , причем по правилу сложения векторов вектор должен быть направлен из точки b в точку c. Звено BD совершает плоско-параллельное движение, поэтому скорость точки D определяется как векторная сумма переносной скорости точки B ( ) и относительной скорости точки D ( ): ):
Вектор скорости направлен перпендикулярно звену BD.На плане скоростей делаем аналогичные построения. Определяем величины скоростей точек механзим в положении 10:
Определим угловую скорость звена 2 и 4:
Проведим вычисления для положения 0.
Значения скоростей всех точек механизма для положений 10 и 0, а также угловые скорости звеньев механизма сводим в таблицу Табл. 4. Табл. 4 - Значения линейных и угловых скоростей
План механизма для 10-го положения представлен на Рис. 7 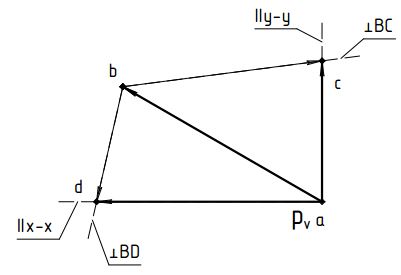 Рис. 7 План скоростей положение 10 План механизма для 0-го положения представлен на Рис. 7 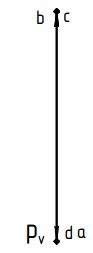 Рис. 8 План скоростей положение 0 |