ТММ курсовая. вариант12 курсовая. Курсовая работа (курсовой проект) по учебному курсу Теория механизмов и машин Вариант 12 Студент
 Скачать 0.62 Mb. Скачать 0.62 Mb.
|

 МИНИСТЕРСТВО НАУКИ И ВЫСШЕГО ОБРАЗОВАНИЯ РОССИЙСКОЙ ФЕДЕРАЦИИ федеральное государственное бюджетное образовательное учреждение высшего образования «Тольяттинский государственный университет» Институт инженерной и экологической безопасности ____________________________________________________________ (институт) ______________20.03.01 Техносферная безопасность________ (кафедра) КУРСОВАЯ РАБОТА (КУРСОВОЙ ПРОЕКТ) по учебному курсу «Теория механизмов и машин» Вариант 12
Тольятти 2022 Содержание1Тема 1. Кинематическое исследование рычажного механизма 4 1.1Исходные данные 4 1.2Структурный анализ рычажного механизма 5 1.3Описание построения плана механизма 8 1.4Построение кинематических диаграмм 10 1.5Описание построения плана скоростей 13 1.6Описание построения плана ускорений 16 1.7Сравнительный анализ 20 2Тема 2. Синтез кулачкового механизма 22 2.1Исходные данные и схема механизма 22 2.2Построение диаграммы аналога ускорений 22 2.3Определение минимального радиуса кулачка 25 1.1Профилирование кулачка методом обращенного движения. 25 Список использованной литературы 27 Тема 1. Кинематическое исследование рычажного механизмаИсходные данные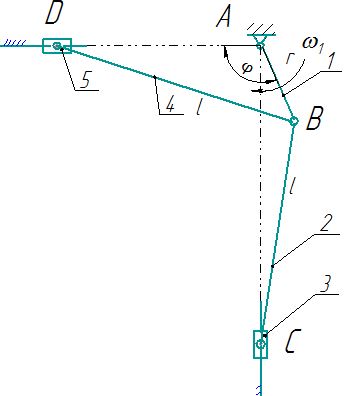 Рис. 1. - Схема механизма Кинематическая схема рычажного механизма представлена на Рис. 1. Табл. 1. – Исходные данные
Структурный анализ рычажного механизмаСтруктурный анализ необходим для выявления особенностей строения механизма, определения последовательности его кинематического и динамического анализа. К задачам структурного анализа механизмов относятся: - определение степени подвижности механизма; - разбивка кинематической цепи механизма на структурные группы; - определение формулы строения механизма. Табл. 2. - Характеристика звеньев механизма
Табл. 3. - Характеристики кинематических пар
* В – вращательная пара; П – поступательная. 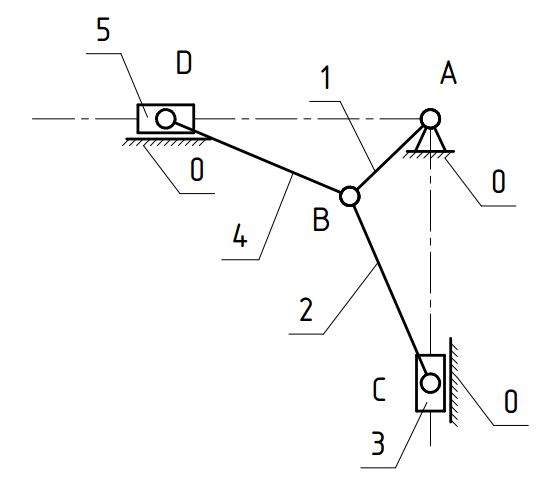 Рис. 2 – Структурная схема механизма Исследуемый механизм имеет: число звеньев механизма  . Число кинематических пар . Число кинематических пар  , ,Степень подвижности механизма  , определяется по формуле: , определяется по формуле:
где  степень подвижности механизма; степень подвижности механизма; – число подвижных звеньев механизма; – число подвижных звеньев механизма; – число кинематических пар пятого класса. – число кинематических пар пятого класса.
Это означает, что в рассматриваемом механизме достаточно задать закон движения только одному звену (в данном задании это звено 1, которое является ведущим), чтобы закон движения всех остальных звеньев был вполне определенным. Начальный механизм  , определяется по формуле: , определяется по формуле:
где  начальный механизм. начальный механизм.
Ведомая кинематическая цепь (ВКЦ)  , определяется по формуле: , определяется по формуле:
где  ведомая кинематическая цепь; – число подвижных звеньев ведомой цепи, ведомая кинематическая цепь; – число подвижных звеньев ведомой цепи,  . .
 . .Структурная группа 2-3    Структурная группа 4-5    |





