электрические машины. Курсовая работа По дисциплине Электрические машины Вариант 2 Выполнил студент группы эт212зу бархатов Илья Витальевич
 Скачать 0.85 Mb. Скачать 0.85 Mb.
|

2.2 Выбор асинхронного двигателяИсходные данные представлены в таблице 5 и на рис. 8 Таблица 5
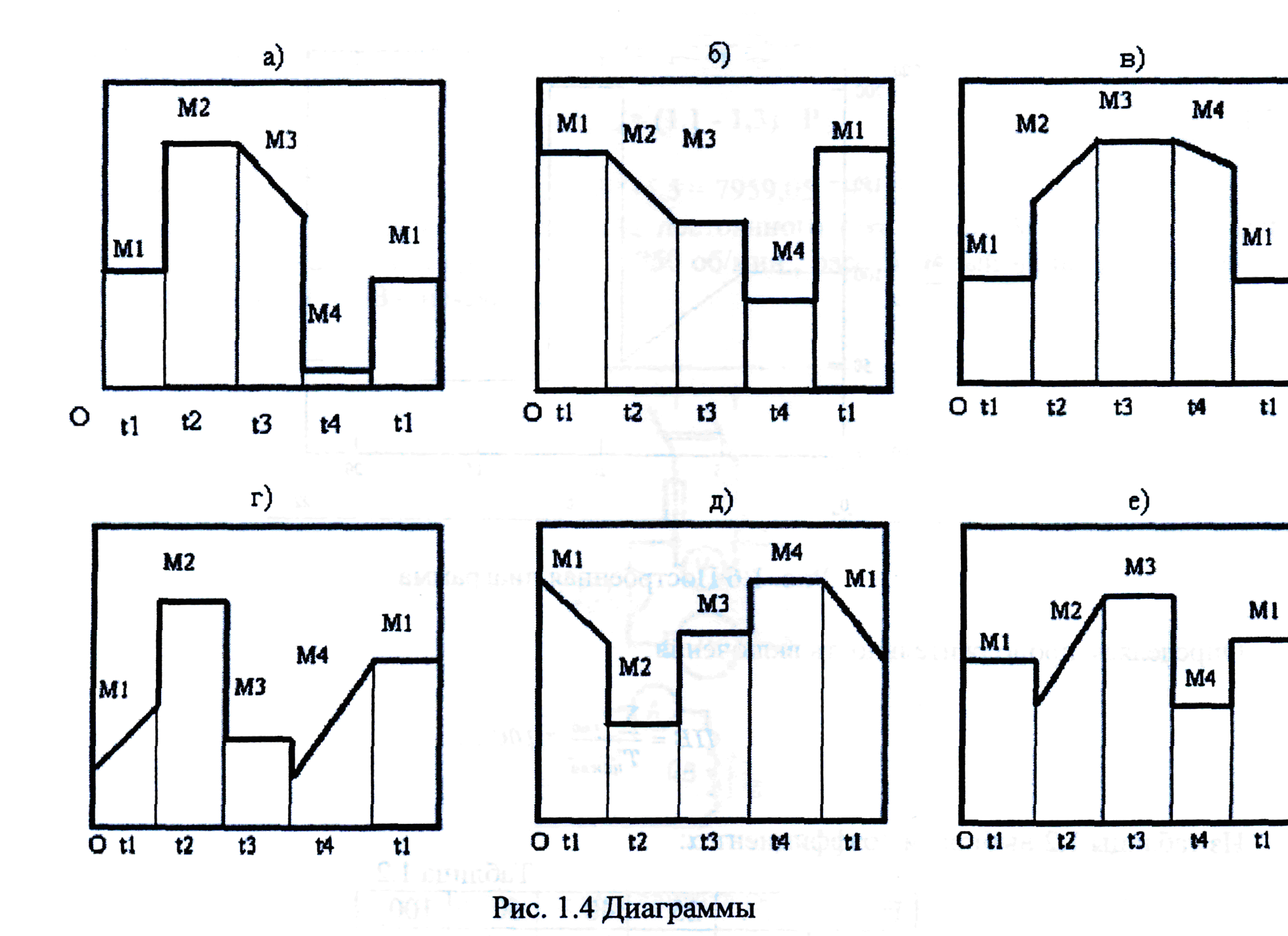 Рисунок 8-Заданная диаграмма моментов производства механизма Для выбора двигателя построена временная диаграмма моментов, приведенная на рис. 4.7  Рисунок 9- Временная диаграмма моментов для АЭП с АДК Определена продолжительность включения (формула 4.15): Затем определяем продолжительность включения  (2.1) (2.1) Определен эквивалентный момент по формуле 2.2.  (2.2) (2.2)где Mi - момент в определенный промежуток времени, Н*м; ti - продолжительность данного промежутка, сек.; Σtраб - суммарное время работы двигателя, сек.; Σtn -суммарное время пауз в работе, сек;  - коэффициент, учитывающий продолжительность включения двигателя (см. таблицу 6). - коэффициент, учитывающий продолжительность включения двигателя (см. таблицу 6).Таблица 6
Получим:  Определена необходимая эквивалентная мощность, исходя из эквивалентного момента и заданной скорости вращения якоря:  (2.3) (2.3) (2.4) (2.4)Так как согласно варианту n= 2700 об/мин, тогда по формуле (2.4)  Найдено заданное скольжение, используя формулу (4.18):  (2.5) (2.5) Определена номинальная мощность двигателя по формуле 2.6. Pном=(1,1-1,3)∙PЭ (2.6)  Из полученного интервала мощностей, номинальной частоты вращения, а также по скольжению выбран двигатель, определены его номинальные значения и пусковые свойства. По справочным данным (ссылка на источник обязательна) выбран двигатель типа 4А1002У3 со следующими данными: Р=5,5 кВт Синхронная частота вращения n1 = 3000 об/мин η=87,5% cosφ =0,91 Sк= 34% Sном= 9% mK=2,5 mM=2,0 mП=1,6 На основании технических данных двигателя и после преобразования формулы 2.7 получаем значение номинальной скорости вращения ротора nном.  (2.7) (2.7) Oпределяем значение номинального момента Мном.  (2.8) (2.8) На основании табличных значений относительных моментов mK и mП определяем, соответственно, значения критического момента Мк и пускового момента Мп , которые необходимы для построения естественной механической характеристики.  (2.9) (2.9)отсюда   (2.10) (2.10) Построена естественная механическая характеристика (см. рис. 10)  Рисунок 10-Естественная механическая характеристика Для определения максимальной частоты, которую должен обеспечить на выходе частотный преобразователь, определяем во сколько раз изменится скорость для максимального момента искусственной характеристики по сравнению со скоростью для такого же момента на естественной. По формуле 2.12 определяем скорость вращения ротора электродвигателя:  (2.12) (2.12) где  - величина скольжения (отн. ед.) на естественной характеристике, соответствующая значению максимального момента для заданной скорости на искусственной характеристике. - величина скольжения (отн. ед.) на естественной характеристике, соответствующая значению максимального момента для заданной скорости на искусственной характеристике.Соответственно, при скольжении , скорость ротора равна  . . По формуле 2.13 вычислено, во сколько раз увеличилась скорость ротора для искусственной характеристики:  (2.13) (2.13) Так как скорость вращения ротора прямо пропорциональна частоте питающей сети, то вычислено, как увеличилась частота питающей сети, по формуле 2.14:  (2.14) (2.14) Так как полученная частота удовлетворяет условию  , то потерями на намагничивание статора можно пренебречь, т.к. они не будут значительно сокращать срок службы двигателя. , то потерями на намагничивание статора можно пренебречь, т.к. они не будут значительно сокращать срок службы двигателя.Для определения минимальной частоты, которую должен обеспечить на выходе частотный преобразователь, определено, во сколько раз изменится скорость для минимального момента искусственной характеристики по сравнению со скоростью для такого же момента на естественной (на естественной характеристике двигатель работает при частоте питающей сети, равной 50 Гц). По формуле 2.15 следует определена скорость вращения ротора электродвигателя: (2.15) где - величина скольжения (отн. ед.) на естественной характеристике, соответствующая значению минимального момента для заданной скорости на искусственной характеристике.Соответственно, при скольжении , скорость ротора равна . Вычислено, во сколько раз уменьшилась скорость ротора для искусственной характеристики по формуле 2.13:  Вычислено, как уменьшилась частота питающей сети (формула 2.16):  (2.16) (2.16) Так как полученная частота удовлетворяет условию  , то потери на нагрев обмоток ротора не будут значительно сокращать срок службы двигателя. , то потери на нагрев обмоток ротора не будут значительно сокращать срок службы двигателя.Рабочие части искусственных характеристик – прямолинейны, т.к. частотное регулирование, не зависимо от способа регулирования, сохраняет жёсткость рабочей части искусственных характеристик. Для выбора способа регулирования во второй зоне определяем величину превышения напряжения на искусственной характеристике, соответствующей максимальному моменту. Учитывая, что отношения амплитуд и частот на разных характеристиках приблизительно равны, воспользуемся отношением (формула 2.17)  (2.17) (2.17)где:  –максимальная требуемая амплитуда напряжения, В; –максимальная требуемая амплитуда напряжения, В;  – номинальное значение напряжения питающей сети, В; fmax –максимальная выходная частота, Гц (определяется по формулам 2.12-2.14); fном – частота питающей сети, Гц. – номинальное значение напряжения питающей сети, В; fmax –максимальная выходная частота, Гц (определяется по формулам 2.12-2.14); fном – частота питающей сети, Гц. Определив превышение напряжения в %, проверяем, удовлетворяет ли это превышение условию  : : Т.к. условие не выполнено, то способ регулирования – векторный с изменением только частоты питающего напряжения. Для определения требуемой зонности регулирования, вынесена в большем масштабе рабочая часть естественной характеристики (прямая 1, см рис. 11) на отдельный график. Затем проведена прямая, соответствующая заданному скольжению (прямая 6, см. рис.11), на которой отмечены заданные в условии моменты. В данном случае имеется одно зонное регулирование (искусственные характеристики расположены только во 2-ой зоне – прямые 2,3,4,5, см. рис. 11).  Рисунок 11-Рабочая часть естественной и искусственных характеристик |