Курсовая работа по дисциплине Теория автоматического управления Расчет оптимальных настроек непрерывных и дискретных регуляторов
 Скачать 0.66 Mb. Скачать 0.66 Mb.
|

4.3 Расчет настроек ПИД-регулятора методом Зиглера – НикольсаПередаточная функция ПИД- регулятора имеет вид  . .Настройки рассчитываются по формулам: Кр=  , Ти = 20, Tд= 0,50, б=0,050. , Ти = 20, Tд= 0,50, б=0,050.Кр = 19.2; Ти = 6; Tд = 1.5; б= 0,15. Передаточная функция ПИД-регулятора с найденными настройками имеет вид:
Структурная схема для расчета показателей качества приведена на рисунке 8. Пример:  Рисунок 8 – Структурная схема для расчета показателей качества в контуре с ПИД-регулятором
На рисунке 9 приведена переходная характеристика, перерегулирование составило 4%, что меньше допустимой погрешности, поэтому время регулирования определено при значении ординаты, равной 0,95, и равно 14 с. 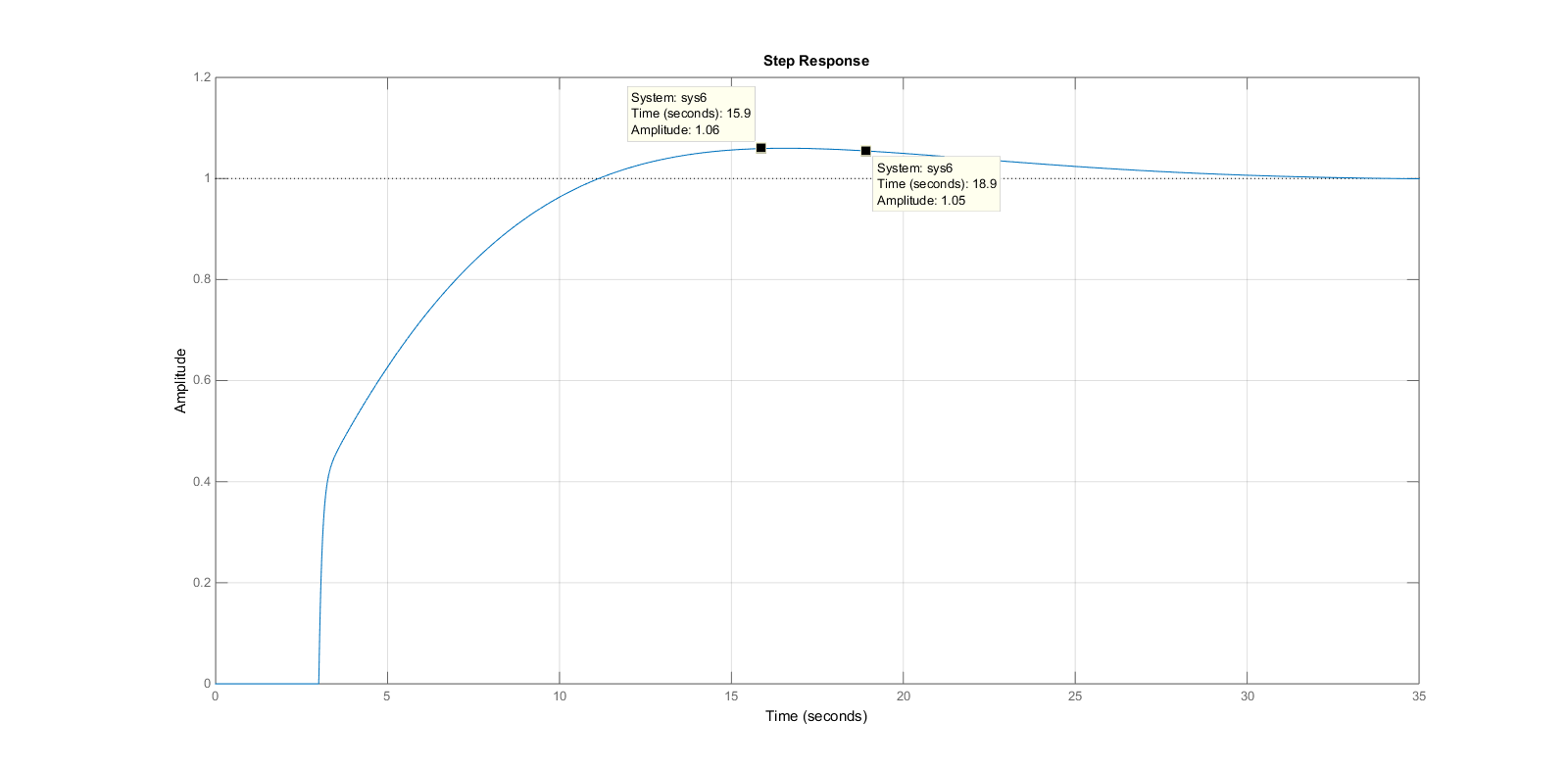
В таблице 4 приведены результаты расчетов настроек регуляторов по методу Зиглера-Никольса. Статическая ошибка рассчитывается δ = 1 - hуст. Таблица 4 – Таблица результатов расчета настроек по методу Зиглера-Никольса
Сделать вывод, в контуре с каким регулятором показатели качества оказались лучше. Время регулирования наименьшее для контура с П-регулятором, но в этом случае статическая ошибка равна 20%. Для контура с ПИ-регулятором σ=0, δ=0, время регулирования tp = 10,9 с время регулирования меньше чем в контуре с ПИД-регулятором. Для ПИД-регулятора в контуре δ=0; время регулирования tp = 18,9 с наибольшее и появляется перерегулирование σ=5.6%. | |||||||||||||||||||||||||||||||||||
