Курсовая работа по дисциплине Теория автоматического управления Расчет оптимальных настроек непрерывных и дискретных регуляторов
 Скачать 0.66 Mb. Скачать 0.66 Mb.
|

4.1 Расчет настроек П-регулятора методом Зиглера – Никольса
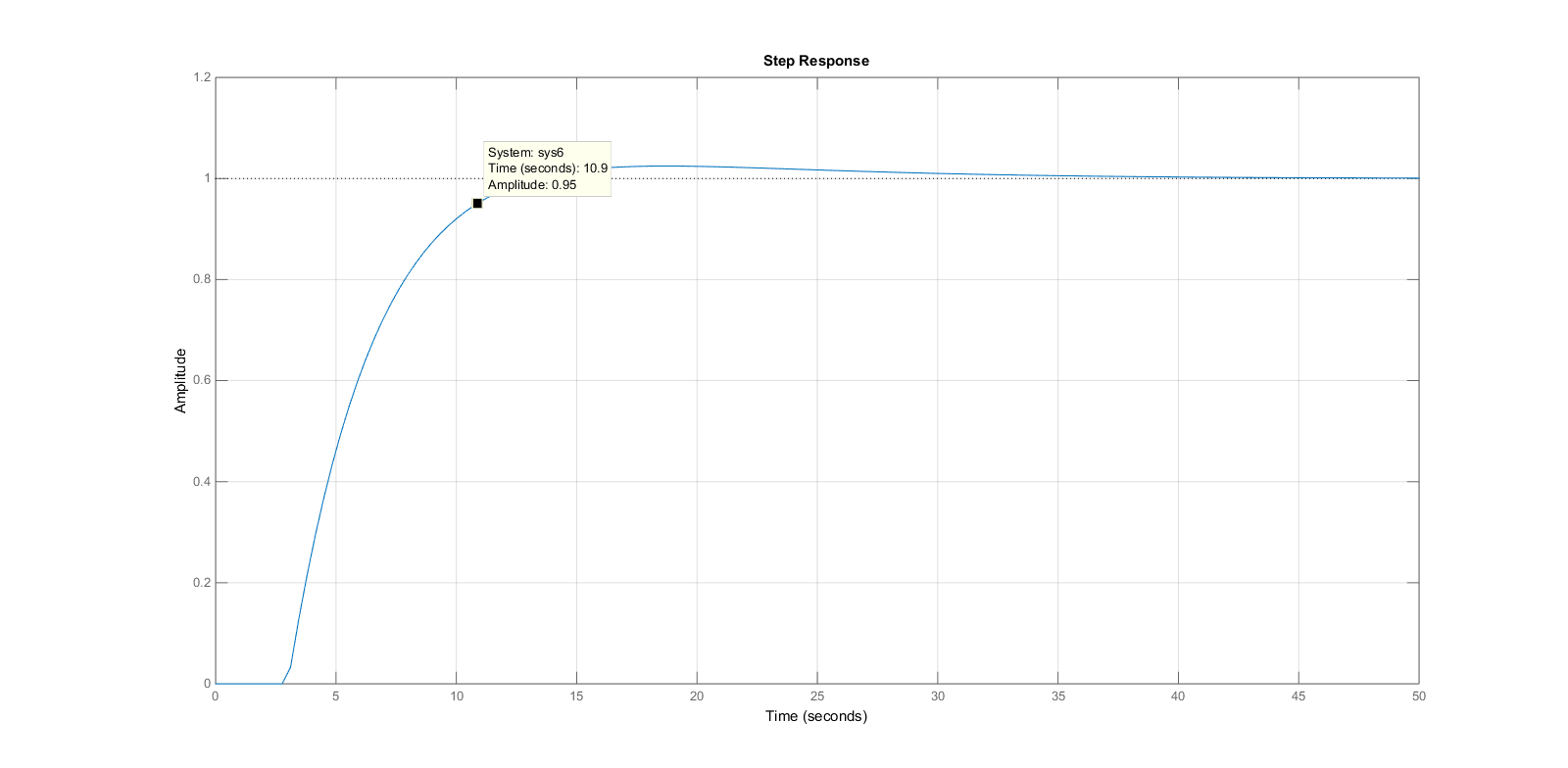
Для построения переходной характеристики замкнутого контура используется пакет Matlab. sys1=tf([0.25],[12 1]) sys2=tf([1], [1],'inputdelay',3) sys3=tf([16],[1]) sys4=series(sys1,sys3) sys5=feedback(sys4,1) sys6=series(sys5,sys2) step(sys6) grid Переходная характеристика системы приведена на рисунке 5. 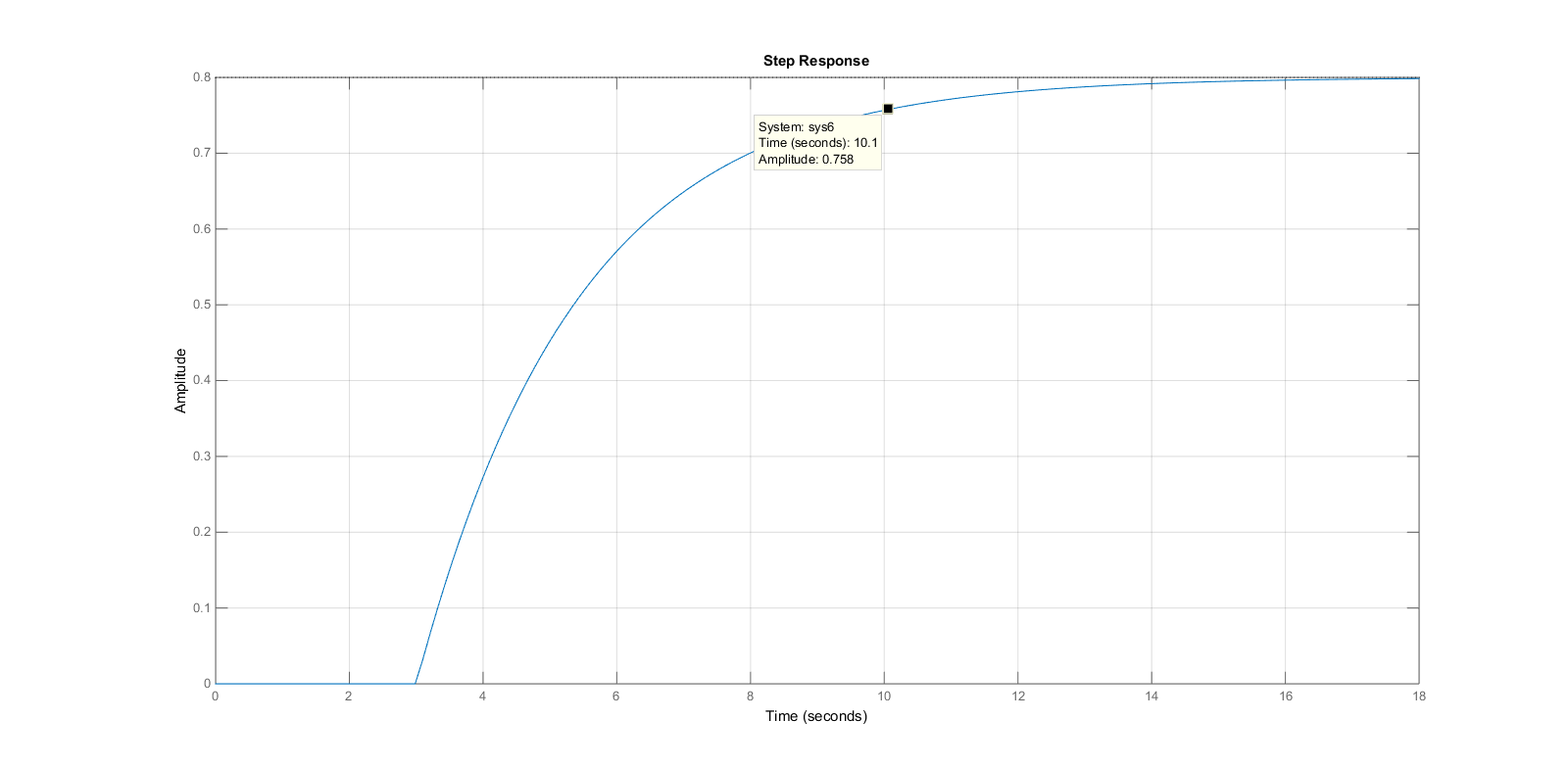 Рисунок 5 - Переходная характеристика контура с П-регулятором Студент: построить переходную характеристику с найденными настройками. Показатели качества рассчитываются по переходной характеристике:
4.2 Расчет настроек ПИ-регулятора по методу Зиглера-Никольса Коэффициент передачи регулятора Wпи=  рассчитывается по формуле Кр = рассчитывается по формуле Кр = , постоянная времени интегрирования Ти.= 30. , постоянная времени интегрирования Ти.= 30.
| |||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||


 = 0,05·0,798 = 0,0399;
= 0,05·0,798 = 0,0399;
 труктурная схема для расчета показателей качества приведена на рисунке 6.
труктурная схема для расчета показателей качества приведена на рисунке 6.