Расчет судовой системы автоматического регулирования. Тау курсовая работа. Курсовая работа по дисциплине Теория автоматического управления " Расчет судовой системы автоматического регулирования"
 Скачать 1.1 Mb. Скачать 1.1 Mb.
|

|
Курсовая работа по дисциплине Теория автоматического управления “Расчет судовой системы автоматического регулирования” Схема - 4 Вариант – 1 Выполнил: к-т Проверил: преподаватель Санкт-Петербург 1.АНАЛИЗ СИСТЕМЫ: 1.1. Составить краткое описание принципа действия и функциональную схему САР; 1.2. Вывести дифференциальные уравнения элементов системы и произвести их линеаризацию; 1.3. Вывести передаточные функции объекта управления по задающему и возмущающему воздействиям; 1.4. Разработать структурную схему САР; 1.5. Определить передаточные функции и характеристические уравнения контура управления и замкнутой САР; 1.6. Исходя из требования статической точности определить коэффициент передачи САР; 1.7. Рассчитать критический коэффициент передачи системы с помощью критерия устойчивости Гурвица 1.8. Построить АФЧХ контура управления и логарифмические характеристики, определить запас устойчивости САР. Исходные данные: Рис. 1. Принципиальная схема САР тока генератора R2 – датчик тока; СУ – сравнивающее устройство, G – генератор СИФУ – система импульсно-фазового управления преобразователя UZ- тиристорный преобразователь (силовая часть)
Генератор имеет следующие параметры: Uн = 220 В, ωн = 78,5 рад/с, 2р = 4; 2а = 2. Диапазон регулирования D = 1, коэффициент передачи датчика тока KДТ = 14 мВ/А. Изменение сопротивления нагрузки  . .Коэффициент передачи сравнивающего устройства СУ Kсу = 40. 1.1 Краткое описание принципа действия и функциональная схема САР.Рассматриваемая система автоматического управления работает по отклонению тока генератора от его номинального заданного значения и является системой стабилизирующего типа. При работе САУ отклонения управляемой величины объекта управления может быть вызвано, как правило, увеличением нагрузки (например, пуск потребителей тока - двигателей) т.е. происходит увеличение падения напряжения на нагрузке Uн. Это в свою очередь вызывает уменьшение тока генератора Iн =>сигнал с датчика тока R2 (датчик выдает сигнал напряжения, пропорциональный току в цепи) Uдт уменьшается =>ошибка рассогласования на входе сравнивающего устройства  (т.к. заданное значение U0 остается постоянным). (т.к. заданное значение U0 остается постоянным).Регулятор тока (РТ) в данной схеме выполняет роль пропорционального звена с коэффициентом передачи KP=>UP так же увеличивается => это вызывает увеличение тока в обмотке возбужденияIв (обмотка возбуждения не осуществляет свое питание от СИФУ) =>увеличивается магнитный поток обмотки возбуждения Фв, пронизывающий якорь => ток в цепи статора восстанавливается до первоначального значения Iн . Работа схемы может быть выражена следующей последовательностью:  с учетом статической ошибки. 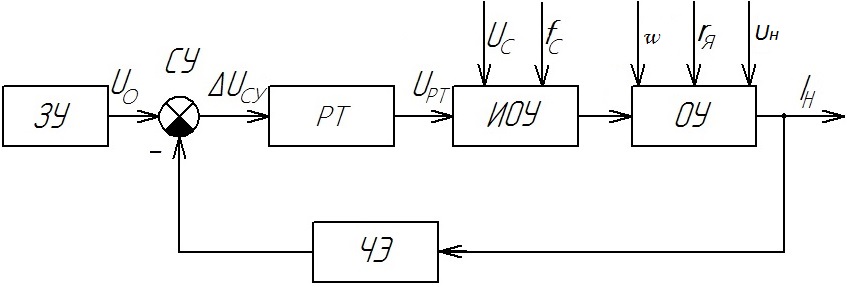 Рис. 2 Функциональная схема САР ОУ – объект управления ЗУ – задающее устройство ЧЭ – чувствительный элемент. ИОУ – исполнительный орган управления. Возмущениями являются: -Частота вращения генератора; -Нагрузка генератора; -Напряжение и частота питающей сети. Данная САР является: -Одноконтурной, т.к. есть всего одна обратная связь; -Одномерной, т.к. только одна управляемая величина; -Статическая, т.к. управляемая величина в установившемся режиме зависит только от значения уставки. -Нелинейная, т.к. присутствует нелинейные элементы (например ТП, СВ); -Замкнутая, т.к. имеется обратная связь; -Непрямого действия, т.к. есть усилитель; -Дискретная, т.к. ТП является дискретным элементом. 1.2 Дифференциальные уравнения элементов системы.Уравнение равновесия напряжения якорной цепи генератора:  Уравнение цепи нагрузок генератора:  Решаем данные уравнения совместно, относительно тока якоря:  Преобразовав уравнение генератора, получим:  Уравнение возбуждения цепи генератора:    Решая совместно систему:  , где , где (сек.) – постоянная времени обмотки возбуждения; (сек.) – постоянная времени обмотки возбуждения; - коэффициент передачи генератора по возбуждению; - коэффициент передачи генератора по возбуждению; ; ; , β - коэффициент пропорциональности между потоком и магнитодвижущей силой (определяем пользуясь графиком (рис.3.)); , β - коэффициент пропорциональности между потоком и магнитодвижущей силой (определяем пользуясь графиком (рис.3.)); (Вб); (Вб); - конструктивная постоянная генератора; - конструктивная постоянная генератора; ; ;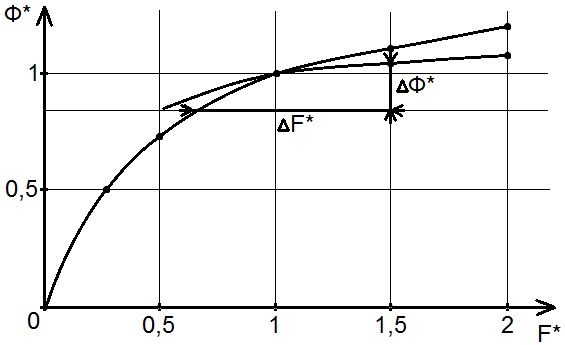 Рис.3  = 0,32 = 0,32 = 1,0 = 1,01.3 Передаточные функции по возмущающему и задающему воздействиям.Уравнения тиристорного преобразователя работающего в режиме непрерывного тока, запишется в следующем виде:  , где , где - коэффициент передачи тиристорного преобразователя по управлению; - коэффициент передачи тиристорного преобразователя по управлению;Передаточная функция ТП:. Уравнение датчика тока:  ; ; (мВ/А); (мВ/А);Уравнение регулятора тока:  ; ; . .Решая совместно выше приведённые уравнения относительно тока якоря, получаем уравнение разомкнутой САУ:  ; (1) ; (1)Передаточная функция разомкнутой системы по управлению:     (об/сек); (об/сек); (Ом); (Ом);Lя = 9 (мГн) = 0,00009 (Гн) - индуктивность якоря генератора определяется по уравнению. Передаточная функция по возмущению:   Уравнение замкнутой системы получим, приравняв  , , ; (2) ; (2) 1.4 Разработка структурной схемы САР.Структурную схему САР строим по уравнениям передаточных функций отдельных звеньев.  - передаточная функция П-регулятора - передаточная функция П-регулятора - передаточная функция тиристорного преобразователя; - передаточная функция тиристорного преобразователя; - передаточная функция обмотки управления; - передаточная функция обмотки управления; - передаточные функции генератора по возмущению - передаточные функции генератора по возмущению  - передаточная функция потенциометра - передаточная функция потенциометра - передаточная функция датчика тока - передаточная функция датчика токаР 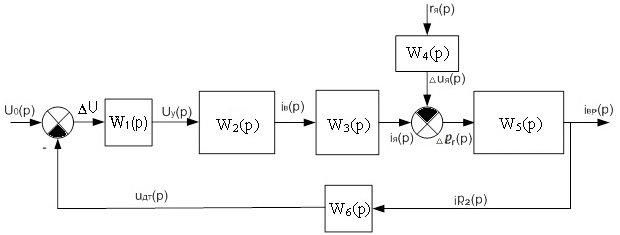 ис.4 Структурная схема САР тока генератора 1.5 Определение передаточных функций и характеристических уравнений.Передаточная функция разомкнутой САР по управлению:  Передаточная функция разомкнутой САР по возмущению:  Передаточная функция замкнутой САР по управлению:  Передаточная функция замкнутой САР по возмущению:  1.6 Исходя из требования статической точности определить коэффицент передачи САР.Найдем изменения тока генератора для установившегося режима, положив p = 0 в замкнутой САР по уравнению (2):  ; ;Относительная статическая ошибка регулирования, определенная из условия работы при максимальном токе,  Коэффициент передачи системы, необходимый для поддержания заданной точности:  ; ; (Ом); (Ом);а коэффициент усиления регулятора тока:  Так как коэффициент передачи регулятора тока (РТ) должен обеспечить статическую ошибку меньше заданной во всем диапазоне регулирования, то выбираю схему регулятора на основе типового. Используя таблицу сопротивлений  реального регулятора близкого к его расчетному значению реального регулятора близкого к его расчетному значению  . .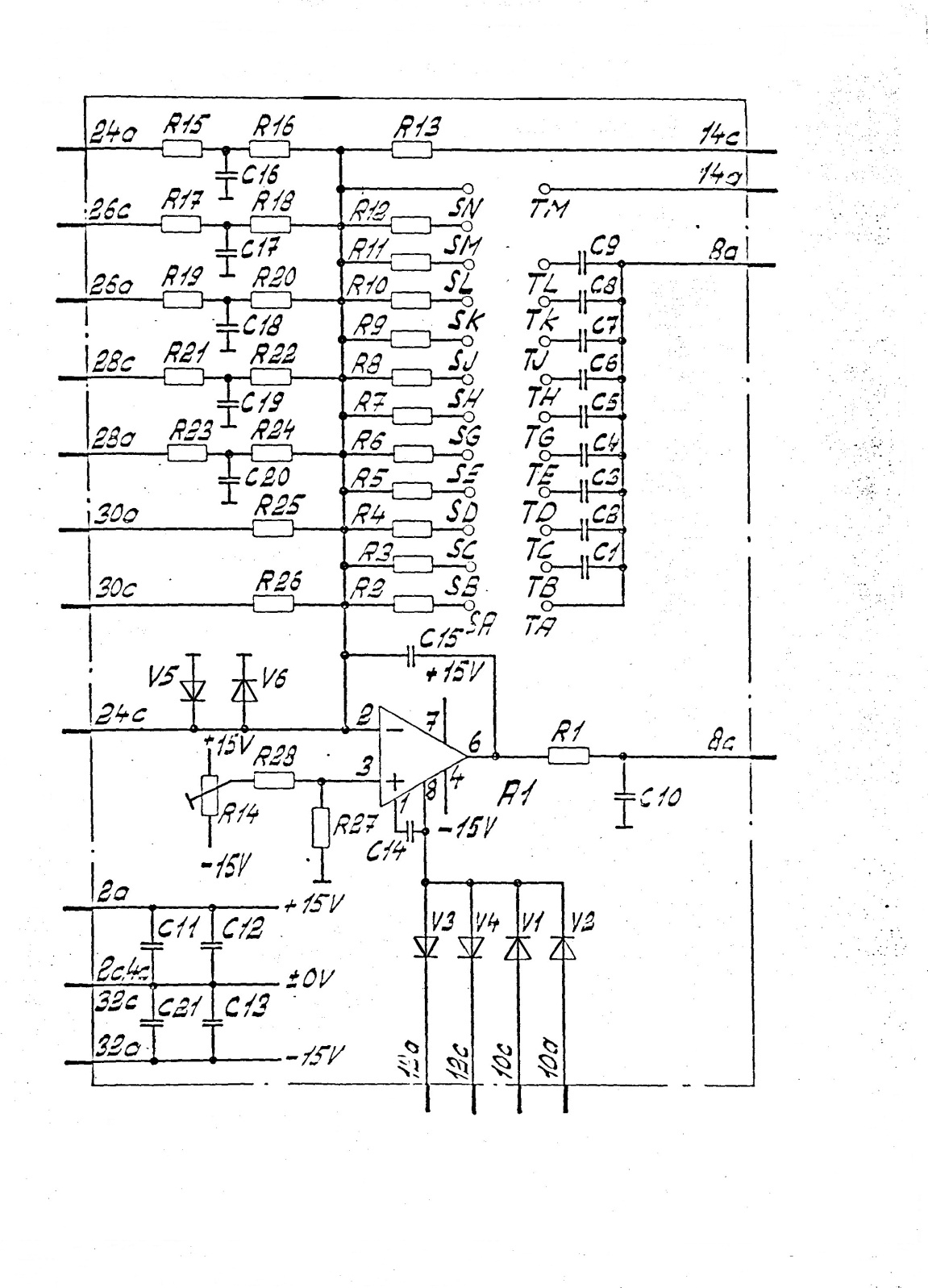 Rвх= R21 || R22 , где R21 = 8,2 (кОм), R22 = 6,8 (кОм); 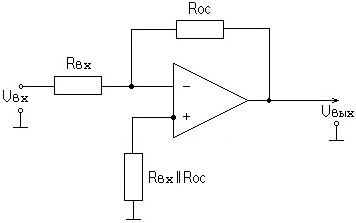 Rос = R12 , где R12 = 22 (кОм), тогда    4) Передаточная функция замкнутой САР в общем и численном виде.          1.7 Рассчитаем критический коэффициент передачи системы с помощью критерия устойчивости Гурвица.Для устойчивости линейной системы 3-го порядка необходимо и достаточно, чтобы 1)  , , , , , , 0 – первое условие выполняется 0 – первое условие выполняетсяЗапишем главный определитель Гурвица:  т.е.  - не удовлетворяет условию - не удовлетворяет условию т.е.  4) 1=а1=0,04 0 - удовлетворяет Условия 2 и 3 меньше нуля =система неустойчивая. Критический коэффициент усиления САР:   1.8 Построить АФЧХ контура управления и логарифмические характеристики, определить запас устойчивости САР.Построим амплитудно-фазовую частотную характеристику разомкнутой САУ.  Построим фазо-частотную характеристику разомкнутой САУ. 
Поскольку АФЧХ разомкнутой системы не охватывает точку (-1 ;j0) замкнутая система будет неустойчивой. Критический коэффициент передачи системы:  где  - частота, при которой ЛФЧХ пересекает прямую φ(ω) = -π - частота, при которой ЛФЧХ пересекает прямую φ(ω) = -π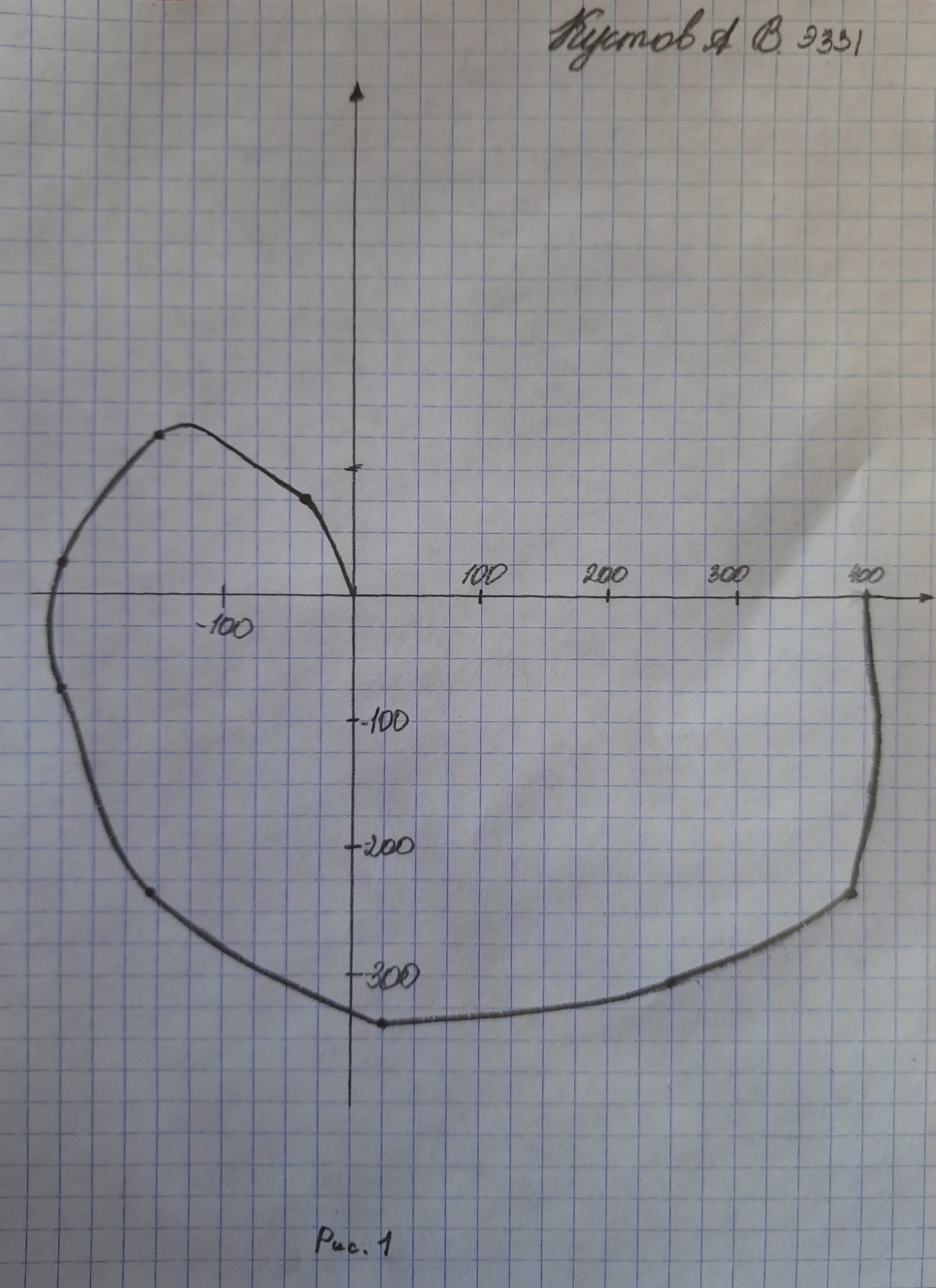 | |||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||



