СУДОВАЯ СИСТЕМА АВАРИЙНО-ПРЕДУПРЕДИТЕЛЬНОЙ СИГНАЛИЗАЦИИ. Курсовая работа по СИИС Алексеев С.А(ГОТОВАЯ). Курсовая работа "Судовая система аварийнопредупредительной сигнализации" по дисциплине "Судовые информационноизмерительные системы"
 Скачать 305.18 Kb. Скачать 305.18 Kb.
|

| ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
| Наименование контролируемого параметра судового дизеля | Диапазон измерения и контроля | Тип датчика | Выходной сигнал датчика/преобразователя | количество |
| Температура выпускных газов, оС | 0…500 | ТерморезисторPt100 | сопротивление | 6 |
| Температура охлаждающей воды оС на выходе из цилиндров, | 0…200 | Преобразователь с токовым выходом 4…20 мА | ток 4…20 мА | 6 |
| Температура охлаждающего масла на выходе из поршней, оС | 0…100 | Терморезистор типа Ni120. | Сопротивление. | 6 |
| Температура подшипников, оС | 0…100 | Термопара типа К | ТермоЭДС. | 6 |
| Частота вращения газотурбонагнетателя, 1/мин | 0…20000 | индукционный | импульсы | 1 |
Задание принял к исполнению:
Руководитель проектирования А.Ю.Самойленко 30.11.2020
Основные требования к системе аварийно-предупредительной сигнализации (АПС)
Система АПС (англ. – Alarm & MonitoringSystem) является информационно-измерительной системой, предназначенной для автоматического дистанционного сбора информации о работе энергетического оборудования, ее централизованной обработки и представления человеку.
Система аварийно-предупредительной сигнализации должна:
обеспечивать подачу звукового сигнала в центральном или местном посту управления главными механизмами и визуальную индикацию каждого сигнала в соответствующем месте;
быть связана с общественными помещениями механиков, а также с каждой из кают механиков через селекторный переключатель, обеспечивающий связь по меньшей мере с одной из этих кают. Администрация может разрешить равноценные устройства;
при возникновении любой ситуации, требующей действий или внимания вахтенного помощника, приводить в действие звуковую и световую аварийно-предупредительную сигнализацию на ходовом мостике;
насколько это практически возможно должна быть спроектирована таким образом, чтобы при отказе отдельных элементов обеспечивалась безопасность контролируемой установки;
приводить в действие сигнализацию вызова механиков, требуемую правилом II-1/38, если аварийно-предупредительный сигнал не привлек внимания в месте его подачи в течение определенного периода времени.
Система аварийно-предупредительной сигнализации должна непрерывно обеспечиваться питанием с автоматическим переключением на резервный источник в случае прекращения нормального питания.
Должна быть предусмотрена подача аварийно-предупредительного сигнала, указывающего на прекращение нормального питания системы аварийно-предупредительной сигнализации.
Система аварийно-предупредительной сигнализации должна обеспечивать одновременное указание более чем одной неисправности, причем принятие одного сигнала не должно препятствовать принятию другого.
Принятие на посту любого аварийно-предупредительного сигнала должно указываться в местах его визуальной индикации. Аварийно-предупредительные сигналы должны подаваться до тех пор, пока они не будут приняты, а визуальная индикация каждого отдельного сигнала должна сохраняться до устранения неисправности, после чего система аварийно-предупредительной сигнализации должна автоматически переходить на нормальный режим работы.
Различают системы с индивидуальными сигналами для каждого механизма или для групп механизмов, последние называются централизованными. Централизованные системы, как правило, применяют для главных двигателей, дизель-генераторов, судовых систем, а также вспомогательных механизмов.
Таким образом, система аварийно-предупредительной сигнализации обеспечивает в рулевой рубке на пульте обобщенную аварийно-предупредительную сигнализацию о неисправности технических средств. Система аварийно-предупредительной сигнализации обеспечивает представление сигналов (в виде мнемосхемы в рулевой рубке и МО) по всем контролируемым параметрам энергетической установки, электроэнергетической установки, вспомогательных механизмов, общесудовых систем и устройств. В каютах всех механиков, канцелярии и столовой предусматриваются панели обобщенной аварийно-предупредительной сигнализации.
Общая характеристика серии аппаратных средств, использованных для комплектации системы АПС
АПС состоит из трех уровней:
Уровень датчиков;
Уровень контроллеров;
Уровень панелей оператора.
Системы АПС современных морских судов создаются на базе микропроцессорных блоков. Каждый из них и система в целом характеризуется двумя компонентами – аппаратным и программным. В настоящей работе решается задача разработки аппаратной части системы АПС. Она решается путем использования промышленно выпускаемых микропроцессорных модулей для систем удаленного ввода/вывода. Наборы таких модулей выпускаются как зарубежными, так и отечественными фирмами. Это модули серии ADAM 4000 фирмы Advantech, серии I 7000 фирмы ICP DAS, серии NL отечественной фирмы RLDA [3…5].
В данной работе для создания системы АПС используются модули серии ADAM 4000 фирмы Advantech, а именно ADAM 4013.
Модуль ввода RTD ADAM-4013 поддерживает один входной канал Pt или Ni RTD для измерения температуры. Этот модуль может принимать датчики RTD с двумя, тремя или четырьмя проводами. Модуль предлагает функции преобразования сигнала, аналого-цифрового преобразования, диапазона и функции цифровой связи RS-485. Он защищает оборудование от скачков напряжения на клемме заземления, обеспечивая гальваническую изоляцию 3000 В постоянного тока.
Согласно заданию на курсовую работу, в компьютере используется порт RS-485, информационная сеть модулей серии ADAM 4000 строится на базе интерфейса RS-485 а это значит, что в данной работе мы не будем использовать преобразователь.
Рисунок 1. Модуль ввода RTD ADAM-4013
На рисунке 1 изображен модуль ввода ADAM-4013 вид сверху.
Структурная схема системы АПС
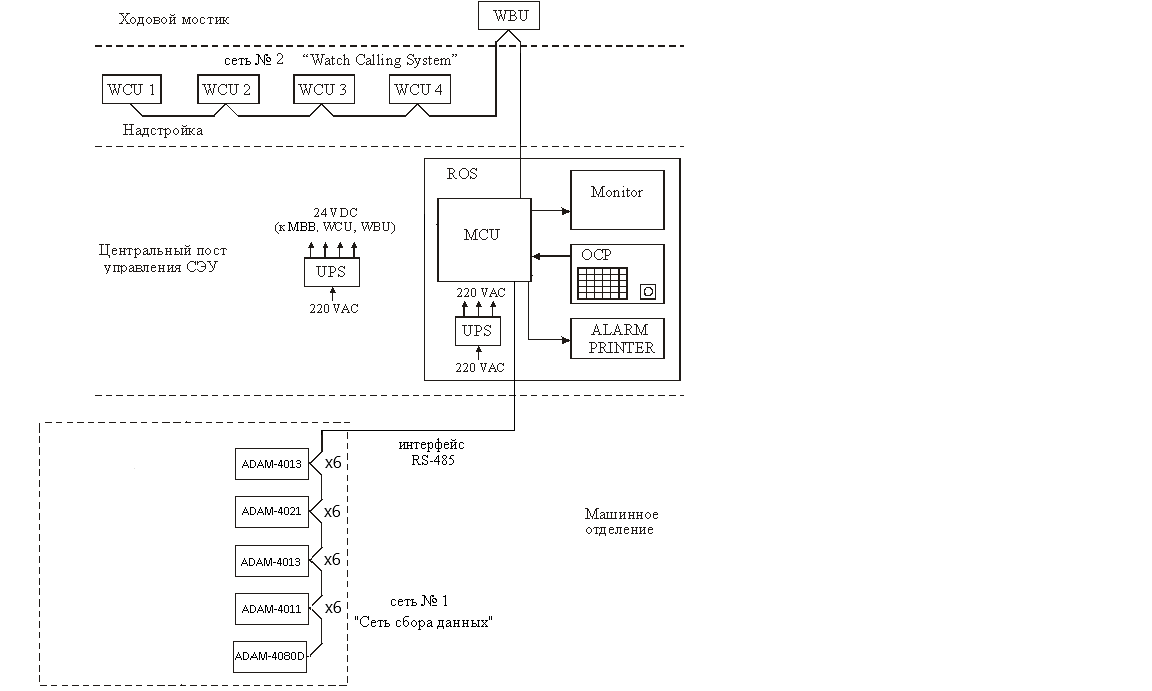
Рисунок 2. Структурная схема системы АПС
Для контроля температуры выпускных газов с помощью терморезистора типа Pt100 типа соответственно используем модуль ADAM-4013, а для контроля температуры охлаждающего масла на выходе из поршней, измеряемую терморезистором типа Ni120, мы так же используем модуль ADAM-4013 именно у этого модуля в качестве диапазона входного сигнала является термометр сопротивления Pt и Ni. Принцип работы термодатчика PT100 строится на том, что при нулевой температуре сопротивление его платиновых элементов составляет 100 Ом. Так как платина обладает положительным коэффициентом, то с увеличением температурного режима, будет увеличиваться и ее сопротивление.
Для контроля температуры охлаждающей воды на выходе из цилиндров используем преобразователь с токовым выходом 4…20 мА. Модуль ADAM-4021, так как именно этот модуль работает с токовым выходом 4. . .20 мА и имеет калибровку по этим значениям.
Для контроля температуры подшипников используем термопару типа К, и модуль ADAM 4011, так как он имеет один канал аналогового ввода, работает с термопарой типа К.
Еще один контролируемый параметр – частота вращения газо-турбонагнетателя. Для приема и обработки выходного импульса индукционного датчика используем один модуль ADAM-4080d. Он имеет два изолированных входа для подключения источников импульсных сигналов. Каждый из входов имеет вход разрешения счета (Gate), однако он может быть отключен программно, поэтому входы разрешения можно никуда не подключать, если в этом нет необходимости.
Перечень модулей ввода
Таблица 1 – Перечень модулей ввода
| Наименование параметра | Модуль | Диапазон измерения и контроля | Тип датчика | Выходной сигнал датчика/преобразователя | количество |
| Температура выпускных газов | ADAM 4013 | 0…500оС | Терморезистор Pt100 | сопротивление | 6 |
| Температура охлаждающей воды на выходе из цилиндров | ADAM 4012 | 0…200оС | Преобразователь с токовым выходом | ток 4…20 мА | 6 |
| Температура охлаждающего масла на выходе из поршней | ADAM 4013 | 0…100оС | Терморезистор Ni120 | сопротивление | 6 |
| Температура подшипников | ADAM 4011 | 0…100оС | Термопара типа К | термоЭДС | 6 |
| Частота вращения ГТН | ADAM 4080D | 0…20000 1/мин | индукционный | импульсы | 1 |
Для контроля температуры выпускных газов используя терморезистор типа Pt100 и температуры охлаждающего масла на выходе из поршней терморезистор типа Ni120 мы используем модули ADAM-4013. Подключение терморезисторов возможно двумя способами: с двухпроводным и трехпроводным подключениями. Наиболее точными измерения получаются, применяя четырехпроводное подключение терморезистора к модулю. Ниже представлена схема подключения.

Рисунок 3. Схема подключения терморезистора по 2-ум, 3-м и 4-проводам.
Для контроля температуры охлаждающей воды на выходе из цилиндров используя преобразователь с токовым выходом 4…20мА мы используем модуль ADAM-4012. Для работы с токовыми сигналами параллельно входам модуля подключают прецизионный резистор сопротивлением 125 Ом. Подключение производится в модуль в входа +in и -in соответственно. Ниже представлена схема подключения.
Рисунок 4. Схема подключения преобразователя к модулю с прецизионным резистором.
Для контроля температуры подшипников с помощью термопары типа K используем модуль ADAM 4011. Модули ввода термопар ADAM-4011 / 4011D используют управляемый микропроцессором интегрирующий аналого-цифровой преобразователь для преобразования напряжения датчика, тока или сигнала термопары в цифровые данные. Затем цифровые данные преобразуются либо в шестнадцатеричный формат с дополнением до двух, либо в процент от полного диапазона (FSR) в соответствии с конфигурацией модуля. По запросу главного компьютера данные отправляются через стандартный интерфейс RS-485. Ниже представлена схема подключения входа термопары ADAM 4011.
Рисунок 5. Схема подключения входа термопары ADAM-4011.
Для измерения частоты вращения используем модуль ADAM-4080D - модуль ввода счетчика / частоты имеет два 32-битных входных канала счетчика (счетчик 0 и счетчик 1) со встроенным программируемым таймером для измерения частоты. Эти экономичные модули позволяют контролировать данные счетчика / частоты по мере выполнения измерений. ADAM- 4080D имеет отдельные клеммы для фотоизолированного входа и неизолированного входа для упрощения проводки. Оптоизолированный вход обеспечивает 2500 В RMS изоляции для защиты вашего оборудования от скачков напряжения на клемме заземления. После того, как произведено соединение, нужно запрограммировать модуль, чтобы определить, какая из двух его входных клемм должна быть активирована (изолированные или неизолированные клеммы). Ниже представлены схемы подключений счетчиков с неизолированным входом, и с входом с фотоизоляцией.
Рисунок 6. Схема подключения счетчика с неизолированным входом.
Рисунок 7. Схема подключения счетчика с фотоизоляционным входом.
Назначение
Модули серии ADAM-4000 предназначены для организации взаимодействия между вычислительной системой и датчиками непрерывных и дискретных параметров, а также для выдачи управляющих воздействий на исполнительные механизмы. Каждый модуль представляет собой функционально законченное устройство, заключенное в пластмассовый корпус. Габаритные размеры модуля 112Х60Х25 мм.
Модули обеспечивают выполнение следующих основных функций:
- прием и дешифрацию команд по каналу RS-485;
- ввод и нормализацию аналоговых сигналов (ток, напряжение);
- опрос состояния дискретных входов;
- фильтрацию аналоговых и дискретных входных сигналов;
- вывод аналоговых (ток, напряжение) и дискретных сигналов;
- аналого-цифровое (для модулей аналогового ввода) преобразование (далее – АЦ-преобразование);
- цифро-аналоговое (для модуля аналогового вывода) преобразование (далее – ЦА-преобразование);
- преобразование шкалы значений непрерывных параметров в предварительно заданные единицы измерения;
- формирование и передачу в адрес основной вычислительной системы информации, содержащей результат измерения или состояние дискретных входов, после получения соответствующего запроса по каналу RS-485.
Модули аналогового ввода и вывода имеют гальваническую изоляцию между цепями, реализующими функции нормализации, низкочастотной фильтрации и АЦ/ЦА-преобразования, и встроенным микропроцессором. Настройка и калибровка модулей осуществляется программным способом путем передачи в их адрес соответствующих команд по информационной сети на основе интерфейса RS-485. Параметры конфигурации модулей, такие как скорость обмена по последовательному каналу связи, наличие проверки контрольной суммы в принятом сообщении, диапазон изменения входного сигнала и его размерность, вид представления измеренных значений при передаче в адрес основной вычислительной системы, верхнее и нижнее предельные значения входного сигнала, по которым производится автоматическое управление дискретными выходами, сохраняются во встроенном репрограммируемом ПЗУ с электрической записью/электрическим стиранием. Электрическое питание модулей осуществляется напряжением 10...30 В постоянного тока. Допускаемый размах пульсаций напряжения питания составляет ±5 В при условии пребывания его значения в указанных пределах.
Конфигурация модулей серии ADAM-4000
Прежде чем подключить модуль в информационную сеть ему необходимо задать режим работы. Хотя все модули могут работать в режиме, установленном заводом изготовителем, рекомендуется проверить правильность установки скорости передачи данных.
Модули ADAM не содержат внешних переключателей режимов работы. Изменение режимов для входных или выходных линий, общих настроек модулей производится подачей команды в виде последовательности ASCII кодов. Все параметры конфигурации модуля, включая адрес цифрового входа, скорость обмена по RS-485, уровни аварийных функций могут быть установлены дистанционно через порты связ. Дистанционная конфигурация модуля может быть обеспечена подачей команд калибровки и установки режимов работы. Параметры калибровки и конфигурация режимов работы сохраняются в энергонезависимых запоминающих устройствах (EEPROM).
При этом физически изменяется зарезервированная область памяти или переключается установочный параметр.
Параметры, запрограммированные заводом-изготовителем:
• Скорость передачи данных: 9600бит/сек;
• Адрес модуля: 01.
Если неизвестны скорость передачи данных и другие установочные параметры модуля, то невозможно установить связь с этим модулем. Для того, чтобы преодолеть эту проблему, каждый модуль имеет вход «INIT*». Необходимо перемкнуть клеммы «INIT*» и «GND» и включить питание модуля. При этом произойдёт инициализация модуля с установкой для обмена по RS-485 заранее известных параметров:
скорость передачи данных: 9600бит/сек
адрес: 01
Итак, чтобы провести инициализацию необходимо выполнить следующие шаги:
• Включить все устройства кроме модуля ADAM.
• Включить модуль ADAM при замкнутых клеммах «GND» и «INIT*».
• Подождать по крайней мере семь секунд, чтобы установились калибровочные параметры.
• Выключить модуль и разомкнуть клеммы «GND» и «INIT*»
Ниже представлена таблица с техническими характеристиками модуля ADAM-4013
Таблица 2. Технические характеристики модуля ADAM-4013.
| Номер канала RTD | 1 |
| Тип ввода | Pt или Ni RTD |
| Вывод скорость (в бит / с) Максимальное расстояние | RS-485 (2-проводный) 1200, 2400, 4800, 9600, 19,2 КБ, 38,4 КБ, 57,6 тыс., 115,2 тыс. 4000 футов (1200 м) |
| Точность | ± 0,05% или лучше |
| Нулевой дрейф | ± 3 мкВ / ℃ |
| Дрейф пролета | ± 25 частей на миллион / ℃ |
| Входные соединения | 2, 3 или 4 провода |
| Номинальное напряжение изоляции | 3000 В |
| CMR при 50/60 Гц | 150 дБ |
| RМР при 50/60 Гц | 100 дБ |
| Частота выборки | 10 выборок в секунду |
| Входное сопротивление | 2 МОм |
| Протокол поддержки | ADAM ASCII |
| Сторожевой таймер | 1,6 секунды (Система) |
| Источник питания | От + 10 до +30 В ( нерегулируемый) |
| Потребляемая мощность | 0,7 Вт при 24 В |
Рисунок 8. Модуль ADAM-4013 вид сверху.
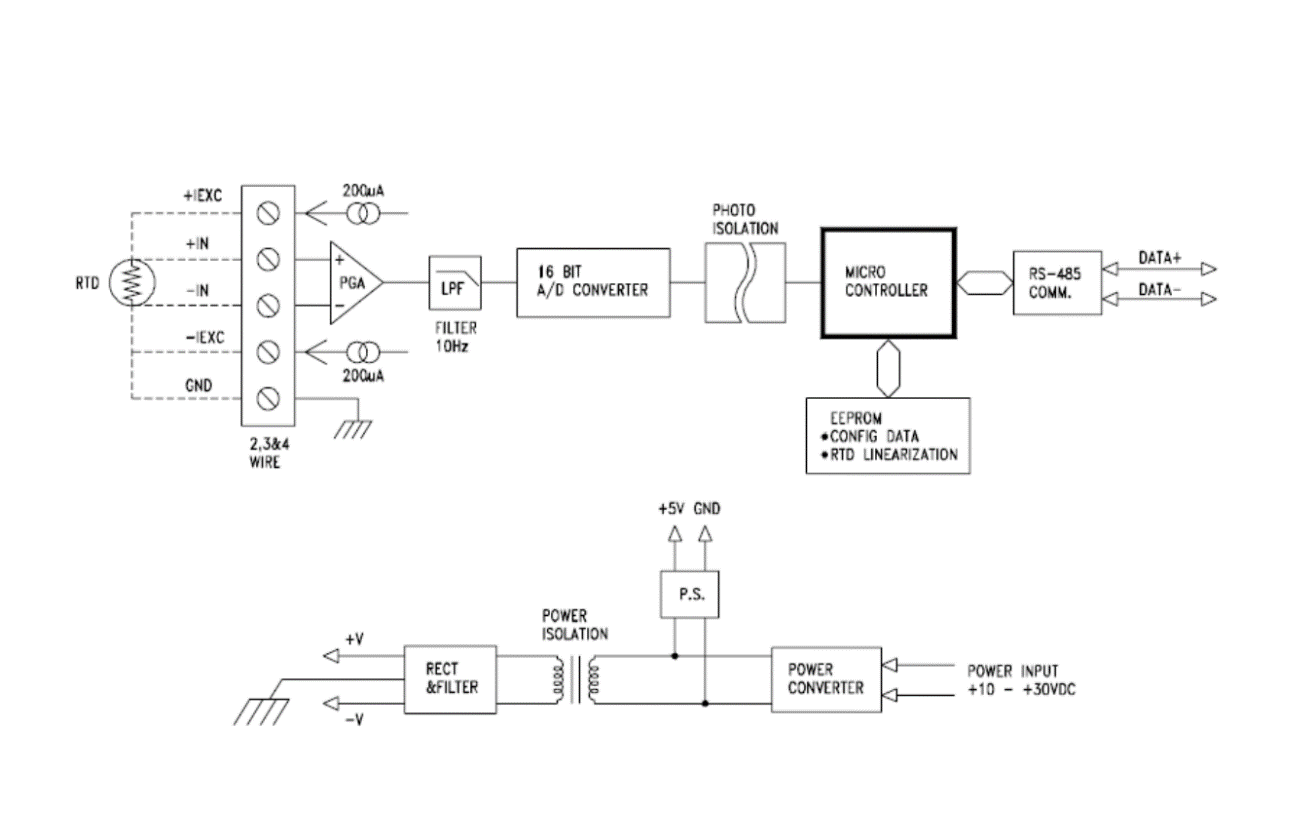
Рисунок 9. Функциональная схема модуля ADAM-4013.
Команда настройки
Согласно таблицам, приведенным в мануале по модулям серии ADAM 4000, а именно марка модуля ADAM 4013, мы находим свои значения по заданию и приступаем к командной настройке:
Прежде чем подключить модуль к сети, его необходимо сконфигурировать, т.е. задать скорость обмена данными, установить бит контрольной суммы, адрес, номер входного диапазона и формат данных.
Команды, посылаемые управляющим компьютером в модуль, имеют следующую синтаксическую структуру:
[разделительный символ][адрес][команда][данные][CHK][cr],
где CHK - контрольная сумма из двух символов (в контрольную сумму не включается код символа возврата каретки); cr - возврат каретки (ASCII код 0Dh).
Каждая команда начинается разделительным символом , в качестве которого могут быть использованы знаки: $, #, %, @, *, в ответах модуля используются знаки , !, ?, >.
Адрес модуля состоит из двух символов и передается в шестнадцатеричной системе счисления. За некоторыми командами следуют данные, но их может и не быть. Контрольная сумма, состоящая из двух букв, может быть или отсутствовать. Каждая команда должна оканчиваться символом возврата каретки (CR). ВСЕ КОМАНДЫ ДОЛЖНЫ БЫТЬ НАБРАНЫ В ВЕРХНЕМ РЕГИСТРЕ!
Устанавливает адрес, диапазон ввода, скорость передачи данных, формат данных, состояние контрольной суммы и / или время интеграции для модуля аналогового ввода.
% AANNTTCCFF (cr) - синтаксис
% является символом-разделителем.
AA ( диапазон 00-FF) представляет собой двухзначный шестнадцатеричный адрес модуля аналогового ввода, который нужно настроить.<<01>> - по умолчанию.
NN представляет новый шестнадцатеричный адрес модуля аналогового ввода. Диапазон от 00h до FFh - <<11210 – 7016 >>
TT представляет код типа (диапазона ввода). Или тип датчика: терморезистор Pt100 - <<23>>
CC представляет собой код скорости передачи данных на RS-485 : 1200 бит/с - <<03>>
FF - шестнадцатеричное число, равное 8-битному параметру, представляющему формат данных, статус контрольной суммы и время интегрирования.
Инженерный формат данных – <<00>>
Контрольная сумма - включена
(КР) – завершающий символ, возврат каретки (0Dh)
Ниже представлен формат данных для FF(8-битный параметр) общий вид.
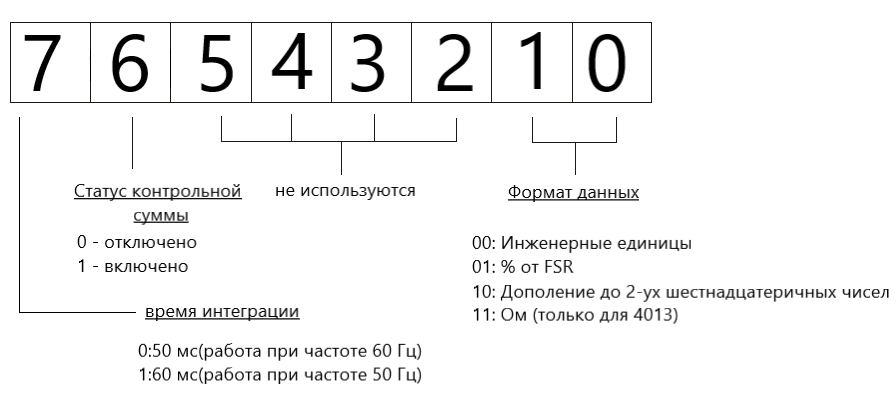
В верхней строке таблицы проставлены номера битов в 8-битовом слове, в нижней строке указаны их коды, под таблицей - соответствия между кодами и их смыслом. Тогда мы получим таблицу со следующими значениями
| 7 | 6 | 5 | 4 | 3 | 2 | 1 | 0 |
| 1 | 1 | 0 | 0 | 0 | 0 | 00 | |
В итоге мы получаем: 110000002=С016
Значит, в позиции FF запишем - <
Таким образом, команда для конфигурации модуля примет вид:
%01702303С0(cr)
Список используемой литературы
СОЛАС – ИМО 1997 г. ГЛАВА II-1 - Правило 51 Система аварийно-предупредительной сигнализации.
Самойленко А.Ю. Электронные и микропроцессорные средства судовых систем управления. Учебное пособие. 3-е издание, перераб. и доп.– Новороссийск: ГМУ им. адм. Ф.Ф.Ушакова, 2014. – 210 с.
Денисенко В.В. Компьютерное управление технологическим процессом, экспериментом, оборудованием. - М.: Горячая линия-Телеком, 2009.-608 с.
Модули удаленного ввода вывода серии ADAM-4000. Техническое описание. Материалы интернет-сайта.