АТПиП. Курсовой проект по дисциплине Автоматизация технологических процессов и производств Тема Разработка аср температуры воды на выходе котла птвм60
 Скачать 326.72 Kb. Скачать 326.72 Kb.
|

|
МИНИСТЕРСТВО ОБРАЗОВАНИЯ И НАУКИ РОССИЙСКОЙ ФЕДЕРАЦИИ ФЕДЕРАЛЬНОЕ ГОСУДАРСТВЕННОЕ БЮДЖЕТНОЕ ОБРАЗОВАТЕЛЬНОЕ УЧРЕЖДЕНИЕ ВЫСШЕГО ОБРАЗОВАНИЯ «САНКТ-ПЕТЕРБУРГСКИЙ ГОСУДАРСТВЕННЫЙ УНИВЕРСИТЕТ ПРОМЫШЛЕННЫХ ТЕХНОЛОГИЙ И ДИЗАЙНА» ВЫСШАЯ ШКОЛА ТЕХНОЛОГИИ И ЭНЕРГЕТИКИ Институт энергетики и автоматизации Кафедра АТПиП Курсовой проект по дисциплине «Автоматизация технологических процессов и производств» Тема: «Разработка АСР температуры воды на выходе котла ПТВМ-60» Выполнил: Студент группы 532 Баженичев Е. _________________ (Подпись) Проверил: Руководитель: Ковалев Д.А. _________________ (Подпись) Санкт-Петербург 2018 МИНИСТЕРСТВО ОБРАЗОВАНИЯ И НАУКИ РОССИЙСКОЙ ФЕДЕРАЦИИ ФЕДЕРАЛЬНОЕ ГОСУДАРСТВЕННОЕ БЮДЖЕТНОЕ ОБРАЗОВАТЕЛЬНОЕ УЧРЕЖДЕНИЕ ВЫСШЕГО ОБРАЗОВАНИЯ «САНКТ-ПЕТЕРБУРГСКИЙ ГОСУДАРСТВЕННЫЙ УНИВЕРСИТЕТ ПРОМЫШЛЕННЫХ ТЕХНОЛОГИЙ И ДИЗАЙНА» ВЫСШАЯ ШКОЛА ТЕХНОЛОГИИ И ЭНЕРГЕТИКИ Институт энергетики и автоматизации Кафедра АТП и П З А Д А Н И Е на курсовое проектирование по дисциплине «Автоматизация технологических процессов и производств» Студенту Баженичеву Евгению группы 532 Тема проекта Разработка АСР температуры воды на выходе котла ПТВМ-60 Содержание расчетно-пояснительной записки 1. Описание объекта управления котла ПТВМ-60 2. Анализ технологического процесса как объекта управления котла ПТВМ-60 3. Структура модели объекта управления 4. Назначение САУ и требования к разрабатываемой САУ 5. Функциональная схема разрабатываемой САУ 6. Алгоритмическая структурная схема разрабатываемой САУ 7. Выбор технических средств для разрабатываемой САУ 8. Моделирование разрабатываемой САУ 9. Выводы и рекомендации 10. Библиографический список Перечень графического материала Динамические характеристики ОУ Алгоритмическая схема ОУ Алгоритмические схемы существующей и предлагаемой САУ Иллюстрации к расчету САУ Функциональная схема САУ Техническая структура САУ Дата выдачи задания Дата представления проекта «»20 г. «»20 г. Руководитель Исполнитель Содержание1.Описание объекта управления 4 2.Анализ технологического процесса как объекта управления 6 3.Структура модели объекта управления 8 4.Назначение САУ и требования к разрабатываемой САУ 10 5.Функциональная схема разрабатываемой САУ 11 6.Алгоритмическая структурная схема разрабатываемой САУ 13 7.Выбор технических средств для разрабатываемой САУ 15 8.Моделирование разрабатываемой САУ 21 9.Выводы и рекомендации 26 Библиографический список 27 Описание объекта управления Объектом управления является котел ПТВМ-60. Котел водогрейный ПТВМ-60 (рис. 1.1) работает на природном газе и предназначен для подогрева сетевой воды с температурой от 70 до 150 ОС, используемой в системе теплоснабжения для нужд отопления и ГВС. Котел имеет башенную компоновку и является одноходовым по движению продуктов сгорания. 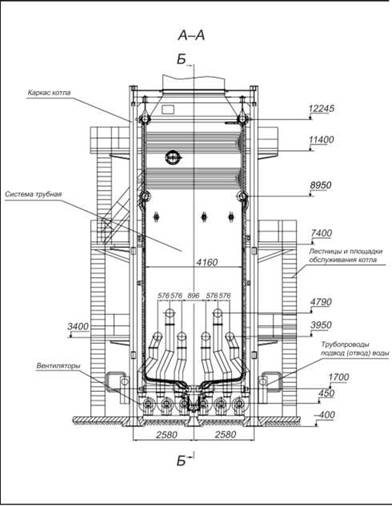 Рис. 1.1 Котел водогрейный ПТВМ-60 Котел имеет башенную компоновку: над вертикальной топочной камерой располагается конвективная поверхность нагрева. Топочная камера экранирована трубами Ø60х3мм с шагом S=64 мм. Конвективная поверхность нагрева котла КВ-ГМ-139,6-150 (ПТВМ-120) состоит из восьми пакетов, а котлов КВ-ГМ-58,2-150 (ПТВМ-50) и КВ-ГМ-69,8-150 (ПТВМ-60) - из четырех пакетов, набирается из U-образных ширм из труб Ø28х3мм с шагом S1=64 мм и S2=40 мм. Боковые стены конвективного газохода закрыты трубами Ø83х3,5 с шагом 128 мм и являются одновременно стояками конвективных полусекций. Трубные системы котлов подвешиваются к каркасу за верхние коллекторы и свободно расширяются вниз. Котлы КВ-ГМ-58,2-150 (ПТВМ-50) оборудованы газомазутными горелками - двенадцать; по шесть с каждой стороны, котлы КВ-ГМ-69,8-150 (ПТВМ-60) и КВ-ГМ-139,6-150 (ПТВМ-120) оборудованы газовыми горелками: КВ-ГМ-69,8-150 (ПТВМ-60) - двенадцать по шесть с каждой стороны, КВ-ГМ-139,6-150 (ПТВМ-120) - шестнадцать, по восемь с каждой стороны. Каждая горелка снабжена индивидуальным дутьевым вентилятором. Котлы имеют облегченную обмуровку, которая крепится непосредственно к экранным трубам. Общая толщина обмуровки 110 мм. Обмуровочные и изоляционные материалы в поставку завода не входят. Анализ технологического процесса как объекта управления При построении систем автоматизации производственных процессов необходимо определить величины, подлежащие контролю и регулированию, а также выявить точки введения управляющих воздействий и каналы их прохождения по объекту. С этой целью составляют схему взаимных воздействий величин объекта, выделяют основные и дополнительные каналы прохождения сигналов, а затем составляют отдельные контуры регулирования, компенсирующие влияние возмущений. При необходимости основные контуры регулирования связывают между собой, а контролируемые величины выбирают так, чтобы их число было минимальным, но достаточным для полного представления о ходе протекания технологического процесса. Структуру модели объекта управления составим исходя из следующих соображений: при увеличении расхода воздуха, подающегося в котел, также увеличивается расход топлива, подаваемого в котел, следовательно, температура воды на выходе будет увеличиваться. На рис. 2.1. изображена упрощенная структурная схема регулирования температуры воды на выходе котла. Основным управляющим воздействием является расход воздуха подаваемого в топку котла, вспомогательным управляющим воздействием является расход топлива. Количество топлива определяется количеством воздуха, подаваемого в топку, по определенному соотношению воздух-газ. 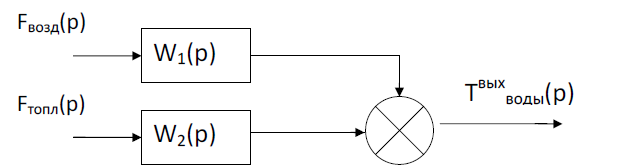 Рис. 2.1 Упрощенная структурная схема водогрейного котла, как объекта управления температурой воды на выходе котла    Структура модели объекта управления В рамках работы мной была получены передаточные функции котла ПТВМ-60 по каналам: расхода топлива на горение; расхода воздуха на горение. Передаточная функция по регулирующему воздействию является апериодическим звеном первого порядка с запаздыванием:  Таблица 1. Параметры модели объекта по регулирующему воздействию.
Вид передаточной функции объекта:  [ [ / % ] / % ] Передаточная функция по возмущающему воздействию является апериодическим звеном первого порядка:  Таблица 1. Параметры модели объекта по возмущающему воздействию.
Вид передаточной функции объекта:  [ / % ] [ / % ] Назначение САУ и требования к разрабатываемой САУ Назначением САУ является обеспечение необходимой температурой воды на выходе из котла ПТВМ-60. Требования к САУ: В процессе регулирования недопустимо перерегулирование системы; Использование датчиков с сигналом 4  20 мА 20 мАКонтроллер должен иметь связь с компьютером управления, др. контроллерами, терминалами; Контроллер должен обеспечивать ПИ-закон регулирования; Допустимое отклонение от заданной величины не более 3%; Время регулирования не должно превышать 1000с; Контроллер должен обеспечивать ручной дистанционный и автоматический режим управления; Контроллер должен обеспечивать обработку как аналоговых, так и дискретный выходных сигналов; Первичная обработка собранной информации; Регистрация и архивация значений регулируемого параметра; Просмотр информации об изменение регулируемого параметра; САУ должна быть непрерывно; Среднее время наработки на отказ САУ не менее 35000 часов; Среднее время восстановления после отказа не более 1 часа; Средний срок службы не менее 20 лет. Функциональная схема разрабатываемой САУ В данном проекте управление технологическим процессом разрежения в топке котла ПТВМ-50 производится по следующим этапам: - сбор и первичная обработка информации; - анализ полученной информации и принятие решения; - реализация управляющих воздействий. Для АСУТП необходимо учитывать все три этапа управления процессом, а также необходимо свести к минимуму участие оператора-технолога в управлении процессом, возложив на него задачу контроля процессом и работой автоматизированной системы в случае ее отказа. Для ручного контроля, в случае отказа системы автоматики, и эффективного управления, и выполнения ряда функций необходима разнообразная информация. Котел, как правило, оборудован шестью комбинированными горелками, расположенными в два яруса по три горелки на противоположных сторонах топки. На верхнем ярусе расположены две, а на нижнем ярусе четыре горелки. Две горелки нижнего яруса, расположенные на противоположных сторонах топки по диагонали друг к другу, являются растопочными. Они оборудуются защитно-запальными устройствами и обеспечивают розжиг остальных горелок. Воздух на горелки подается через общий короб от одного или двух дутьевых вентиляторов. Для удаления продуктов горения и поддержания требуемого разряжения в топке котел оснащается одним или двумя дымососами.  Рис.5.1 Функциональная схема котла ПТВМ–60 Алгоритмическая структурная схема разрабатываемой САУ Расчет автоматической системы регулирования (АСР) будем проводить на примере регулирования температуры воды на выходе из котла. Структурная схема автоматического регулирования представлена на рис.6.1.  Рис.5. Структурная схема АСР На рис.5. даны следующие обозначения: WОБ(P) – передаточная функция объекта управления; WОБ(в) – передаточная функция объекта управления по возмущающему воздействию; Wфэ(Р) – передаточная функция формирующего элемента; WД(Р) – передаточная функция датчика измерения температуры в нижней части бункера; WИМ(Р) – передаточная функция исполнительного механизма; Wро(Р) – передаточная функция регулирующего органа; DРЕГ(Z) – передаточная функция регулятора; Для расчёта синтезируемой системы управления мне понадобятся передаточные функции всех элементов системы. Выбор технических средств для разрабатываемой САУ Датчики давления ОВЕН ПД100И 8х1, ОВЕН ПД100И, ОВЕН ПД100- линейка микропроцессорных датчиков давления, предназначенных для непрерывного преобразования давления измеряемой среды (избыточного, избыточного-вакуумметрического, гидростатического, вакуумметрического) в унифицированный сигнал постоянного тока 4…20 мА. [5]. Отличительные особенности измерителей: Соответствуют требованиям к оборудованию класса А по устойчивости к воздействию электромагнитных помех в соответствии с ГОСТ Р 51522-99. Выполняются в корпусах из нержавеющей стали и имеют минимальное количество разъемных соединений, что обеспечивает высокую защиту от коррозии, герметичность и пылезащищенность со степенью защиты до IP68 (ОВЕН ПД100-ДГ). Имеют кабельный разъем стандарта EN175301-803 форма А (DIN43650 А) скабельным вводом для удобного подсоединения сигнального кабеля. Имеют предельное значение перегрузки чувствительного элемента от 200 % ВПИи выше. Широкая линейка моделей ПД100 предоставляет возможность подбора датчика под любую задачу. Малые габариты и вес датчиков позволяют устанавливать их непосредственно на объекте, в том числе и в труднодоступных местах. Применение: в качестве напоромеров и тягонапоромеров в автоматике защиты газовых котлов и горелок, в качестве преобразователей давления в контурах регулирования мощности и разрежения, для индикации уровня воды в барабане котла и для контроля положения заслонок. Основные характеристики общепромышленного преобразователя ПД100: измерение избыточного/вакуумметрического/избыточно-вакуумметрического давления нейтральных к нержавеющей стали AISI 316L (AISI 304S) сред (газы, пар, вода, слабоагрессивные жидкости). основная приведенная погрешность – 0,25; 0,5; 1,0 % ВПИ. преобразование давления в унифицированный сигнал постоянного тока 4...20 мА. верхний предел измеряемого давления (ВПИ) – от 10 кПа до 10 (25*) МПа. перегрузочная способность – от 200% ВПИ и выше. степень защиты корпуса и электроразъема преобразователя – IP65. помехоустойчивость удовлетворяют требованиям к оборудованию класса А по ГОСТ Р 51522. ОВЕН ПД100-ДИмодели 115 - преобразователи дифференциального давления общепромышленные. Преобразователи дифференциального давления общепромышленные и во взрывозащищенном (EXD) исполнении. Датчики ОВЕН ПД100 модели 155 представляют собой преобразователи дифференциального давления в полевом корпусе с измерительной мембраной из нержавеющей стали и металлическим кабельным вводом. Преобразователи данной модели предназначены для измерения перепада давления или уровня жидкости в сосудах под давлением или расхода среды на сужающих устройствах в системах автоматического регулирования и управления на основных и вторичных производствах в промышленности и ЖКХ: газораспределительных системах, узлах учета газа, объектах энергетики, «барабанах» котлов в котельных, парогенерирующих объектах, вентиляционных системах и т.п. Датчик давления Выбор между Метран-150CD и Сапфир-22МПС Отличительные особенности датчика давления Метран-150CD [3]: —минимальное измеряемое давление датчиком: 0-0,025 кПа; —максимальное измеряемое давление датчиком: 0-60 МПа; Диапазон температур окружающей среды: от минус 40 до плюс 80°С. Основная погрешность до ±0,075% (штатно 0,1, 0,25, 0,5%). Возникающая дополнительная температурная погрешность— не более ±0,05% на каждые 10°С сверх стандартного диапазона. Отличительные особенности датчика давления Сапфир-22МПС [4]: —минимальное измеряемое давление датчиком: 0-0,025 кПа; —максимальное измеряемое давление датчиком: 0-55 МПа; Диапазон температур окружающей среды: от минус 40 до плюс 75°С. Основная погрешность до ±0,085% (штатно 0,1, 0,25, 0,5%). Возникающая дополнительная температурная погрешность— не более ±0,06% на каждые 10°С сверх стандартного диапазона. На основание сравнения, выбираем датчик Метран-150CD, т.к. обладает более точным пределом измерения, а также большим диапазоне измерительных величин. Характеристики датчика Метран-150CD Интеллектуальный датчик давления Метран-150CD предназначен для непрерывного преобразования в унифицированный токовый выходной сигнал и/или цифровой сигнал в стандарте протокола HART входных измеряемых величин: избыточного давления; абсолютного давления; разности давлений; давления-разрежения; гидростатического давления (уровня). Управление параметрами датчика: с помощью HART-коммуникатора; удаленно с помощью программы HART-Master, HART-модема и компьютера или программных средств АСУТП; с помощью клавиатуры и ЖКИ или с помощью AMS. Измеряемые среды: жидкости, нефтепродукты; пар, газ, газовые смеси Диапазоны измеряемых давлений: минимальный 0-0,025 кПа; максимальный 0-68 МПа Выходные сигналы: 4-20 мА с HART-протоколом; 0-5 мА Основная приведенная погрешность до ±0,075%; опция до ±0,2% Диапазон температур окружающей среды от -40 до 85°С; от -55 до 85°С (опция) Термопреобразователь ОВЕН -ДТПS [7] с унифицированным выходным сигналом предназначен для преобразования значения температуры различных сред в различных отраслях промышленности теплоэнергетической, химической, металлургической, а также в сфере ЖКХ, в унифицированный токовый выходной сигнал 4…20 мА. Основные характеристики: применяются для измерения высоких температур – до 1300 °С; возможно кратковременное применение при температуре – до 1600 °С; возможно применение в окислительной атмосфере; не рекомендуется применять ниже 400 °С, т. к. ТЭДС в этой области мала и крайне нелинейна; высокая прочность и твердость корундового чехла; высокая теплопроводность корундового чехла (сопоставима с теплопроводностью стали 12Х18Н10Т); износостойкость, в т.ч. на высоких температурах; высокая коррозийная стойкость, в т.ч. на высоких температурах. Контроллер КР-500 – многоканальный многофункциональный микропроцессорный контроллер, предназначенный для измерения и измерительного преобразования унифицированных аналоговых и дискретных сигналов датчиков в виде напряжения и силы постоянного тока, приема и обработки информации, формирования управляющих аналоговых и дискретных сигналов по различным законам регулирования на основе измеренных параметров технологических процессов, также для передачи по запросу предварительно обработанной информации по каналам связи устройствам верхнего уровня. Такие контроллеры применяются в составе распределенных локальных систем управления технологическими процессами, выполнения технологических защит в энергетике, металлургии, химической, нефтяной отраслях промышленности, включая атомные электростанции. Контроллер имеет проектно-компонуемое устройство, которая позволяет пользователю выбрать нужный набор модулей и блоков, согласно числу и виду входных/выходных сигналов. Устройства выбираются в зависимости от решаемых задач и могут состоять из – блоков контроллера БК-500, миниконтроллера МК-500, микроконтроллера ШМК-Д, пульта контроллера, модулей устройств связи с объектом (УСО-Д), блоков питания и ряда дополнительных устройств и блоков. Технические характеристики контроллера КР-500: Температура окружающей среды – от 1 до 50 ºС Относительная влажность – от 30 до 80 % без конденсации Атмосферное давление – от 86 до 106.7 кПа Параметры вибрации – от 0.5 до 50 Гц Напряжение питания контроллера - 24± 6 В Также контроллер ориентирован на построение недорогих систем различной алгоритмической и информационной сложности: - макро-система (до 3840 каналов); - миди-система (64-128 каналов); - мини-система (16-64 каналов); - система малой, локальной автоматики (бесконтактная релейная логика). Моделирование разрабатываемой САУ Синтез системы управления производится при помощи автоматизированной системы имитационного моделирования АСУ. Рассматривается линейная одноконтурная система. Коэффициенты передачи звена (как безынерционных) САУ: – передаточная функция формирующего элемента  ; ;– передаточная функция датчика измерения температуры  ; ;– передаточная функция исполнительного механизма  ; ;– передаточная функция регулирующего органа  ; ;Для синтеза системы выбираем ПИ-регулятор. ПИ-закон регулирования позволяет увеличить точность регулирования, уменьшить время обработки задающего воздействия, свести статическую ошибку к нулю.  Моделирование системы без регулятора. 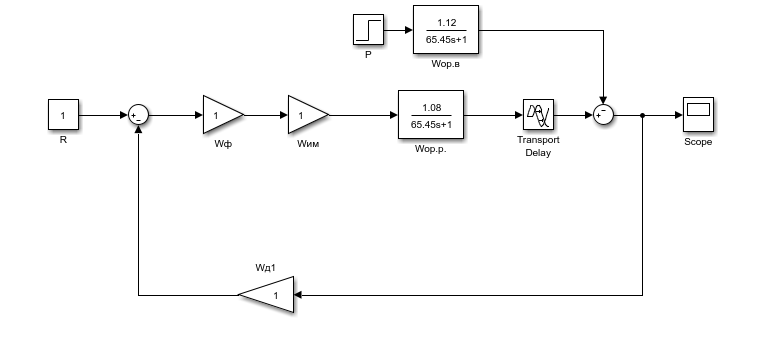 Рис.8.1 Модель объекта регулирования 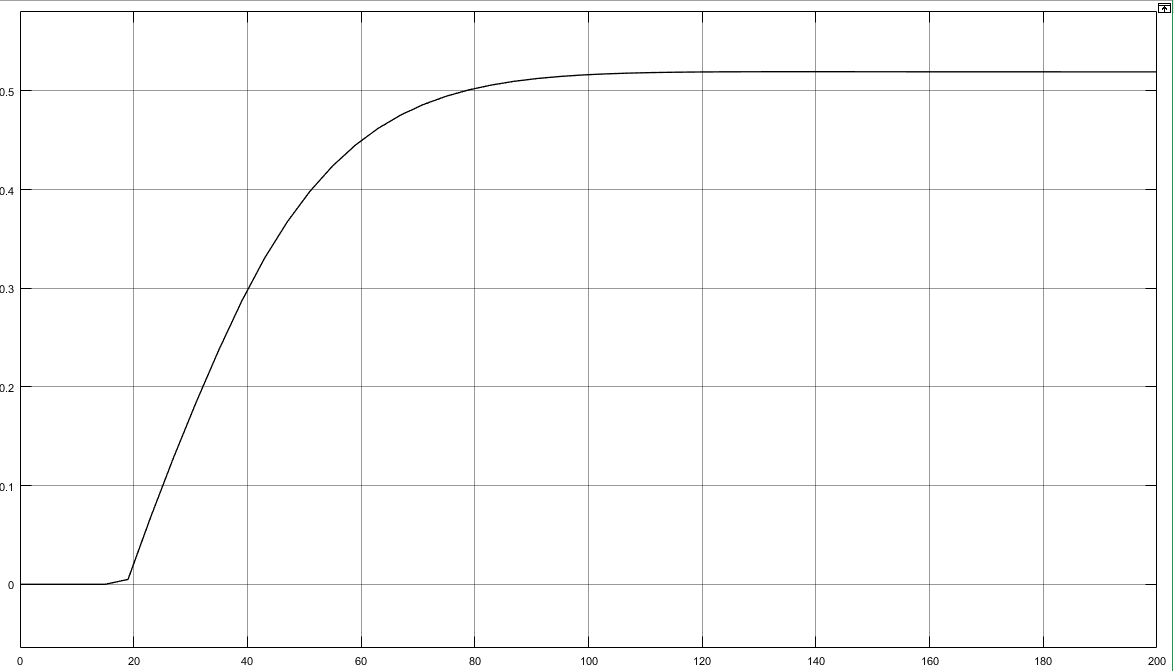 Рис.8.2 Тепловая энерция датчика температуры 18с Как видно из графика, система устойчива, но время регулирования и температуры воды на выходе, не отвечают заданным условиям. Блок  введен для установки температуры воды введен для установки температуры воды  . .Произведен расчет ЛРЗ для ПИ-регулятора. 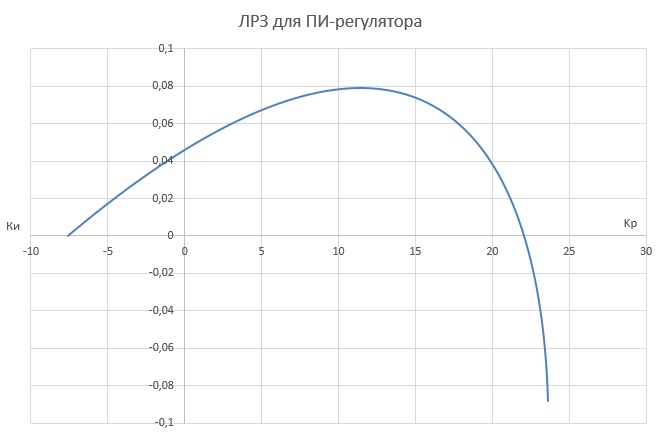 Рис.11. Путем подбора, выбраны настройки, приближенные к заданным условиям.    Моделирование с данными параметрами. 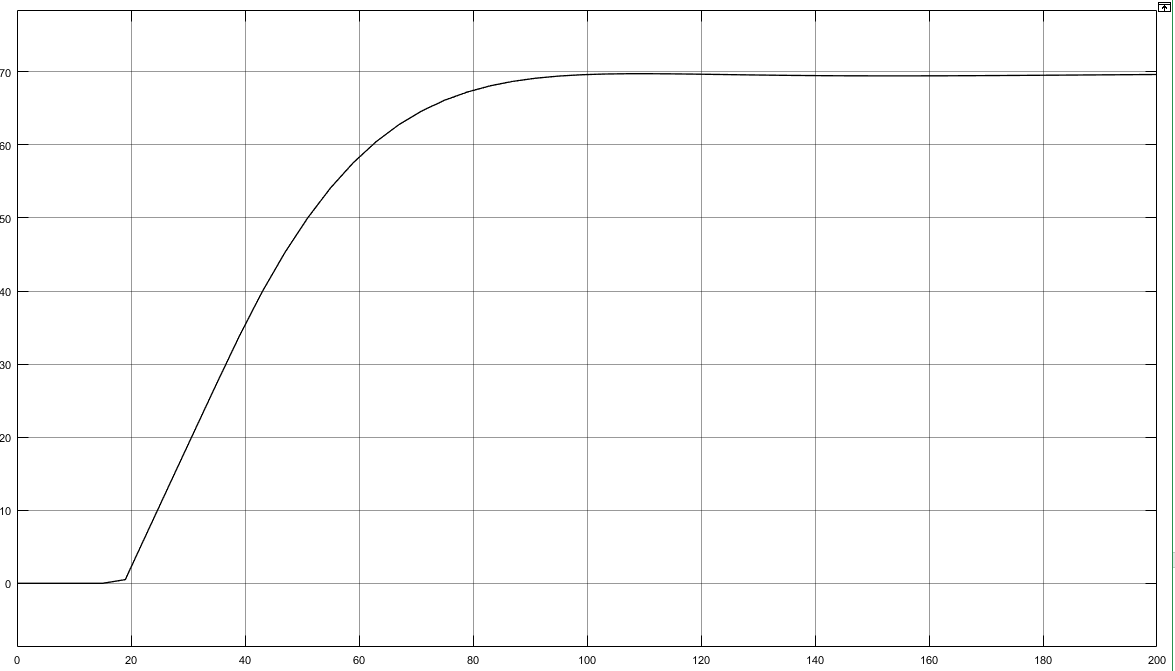 Рис.8.3   Для выбора оптимальный настроек регулятора, произведено моделирование с автоматическим подбором коэффициентов. Результат изображен на Рис.8.4. 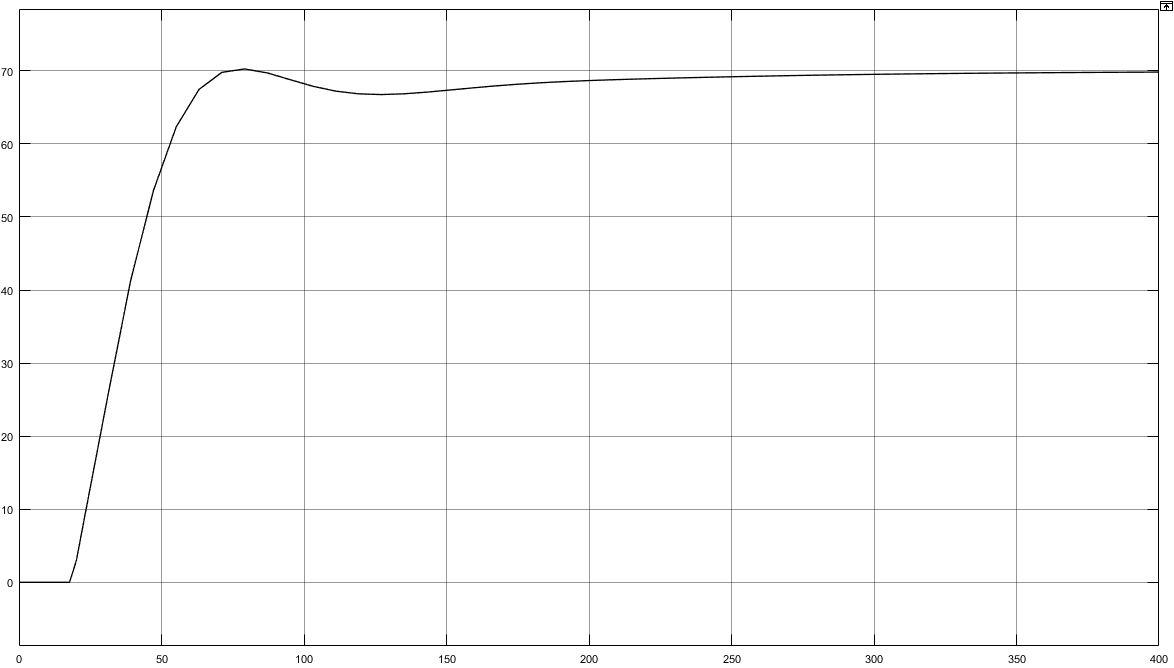 Рис.8.4.     Учитывая тот факт, что отклонение значения на выходе входит в допустимый предел, а время регулирования для нас является важным фактором. Исходя из этого, выбираем настройки, предложенные системой, которые обеспечивают оптимальное качество переходного процесса. Выводы и рекомендации В данном курсовом проекте в соответствии с поставленной задачей была разработана САУ температуры воды на выходе из котла. Для рассматриваемой системы автоматического регулирования температуры щепы на выходе из бункера пропарки разработана функциональная схема автоматического регулирования. Также разработана алгоритмическая структурная схема САУ и были выбраны технические средства автоматизации. При моделировании одноконтурной САУ в MATLAB-Simylink, были предложены настройки ПИ-регулятора:  , которые удовлетворяют качество регулирования, в сравнении с настройками, полученными при расчете ЛРЗ-диаграммы для ПИ-регулятора. , которые удовлетворяют качество регулирования, в сравнении с настройками, полученными при расчете ЛРЗ-диаграммы для ПИ-регулятора.Библиографический список 1.Воронова В.В., Смирнов М.Н., Солдатова Н.А. Влияние некоторых факторов на эффективность пропитки осиновой щепы // Целлюлоза, бумага и картон: научно-техн. реф. сб./ ВНИПИЭИлеспром – М., 1982. – С. 9. 2.Буйлов Г.П., Волков А.М., Стефановский С.В. и др. Экспериментальные статические характеристики процесса пропитки осиновой щепы на Сясьском ЦБК в производстве облицовочного картона марок А и Б // Химия и технология бумаги: межвуз. сб. науч. тр. / ЛТА. – Л., 1988. – С. 131–133. 3.Буйлов Г.П., Кудряшова Н.Ю., Стефановский С.В. и др. Экспериментальное определение математической модели пропиточного котла для осиновой щепы Сясьского ЦБК по различным каналам управления в производстве картона марок А и Б // Химия и технология целлюлозы и полуцеллюлозы: межвуз. сб. науч. тр / ЛТА. – Л., 1989. – С. 57–59. 4.Буйлов Г.П., Стефановский С.В., Криман Б.И. и др. Способ автоматического управления обработкой древесной щепы в пропиточном аппарате . А.с. СССР №1501008, G05D27/00, D21C7/06. Опубл. 15.08.89, БИ. №30. 5.Пузырев С.С. Древесное сырье – определяющий фактор качества механической массы: реферативная информация /ЦИНТИхимнефтемаш – М., 1990. 6.Буйлов Г.П., Буйлова Л.И. Экспериментальные исследования узла термогидролитической обработки щепы после импрегнатора в производстве ХТММ. // Машины и аппараты целлюлозно-бумажного производства: межвуз. сб. науч. тр. / ЛТИ ЦБП. – Л., 1991. – С. 117–118. 7.Буйлов Г.П., Доронин В.А., Серебряков Н.П. Автоматика и автоматизация производственных процессов целлюлозно-бумажных производств: учеб. пособие для вузов. – М.:Экология, 1995. – 320 с. |