Конструкция авиа двигателя. Конструкция и прочность АД Тараканов Д.Е 0919.0007. Курсовой проект по дисциплине конструкция и прочность авиационных двигателей тема Анализ статической и динамической прочности рабочей лопатки первой ступени турбины гтд тв2117
 Скачать 2.01 Mb. Скачать 2.01 Mb.
|

3.3 ВыводИз анализа частотной диаграммы можно сделать вывод о том, что лопатка первой ступени турбины не соответствует требованиям динамической прочности, так как возмущающая сила, вызванная наличием форсунок создаёт резонансную точку на рабочем диапазоне частот, пересекаясь с частотой первой формы собственных колебаний лопатки на частоте порядка 20500 Гц. Способом вывода резонансных режимов работы за пределы рабочего диапазона частот вращения ротора можно считать уменьшение числа форсунок до 7, что сместит резонансную точку за границу рабочих режимов. При запуске и останове двигателя будет наблюдаться резонанс от возмущающей силы сопловых аппаратов, но он не критичен так как происходит за границей рабочего диапазона. Список использованных источниковМакаров Н.В., Шерлыгин Н.А. Авиационные газотурбинные двигатели. Прочность и конструкция: Учебное пособие. – Л.: ОЛАГА, 1976. – 96 С. Устройство и летная эксплуатация силовых установок: Учебное пособие для вузов/ Соловьев Б.А., Куландин А.А., Макаров Н.В. и др. – М.: Транспорт, 1991. – 256 С. Конструкция и прочность авиационных газотурбинных двигателей/ Лозицкий Л.П. и др. – М.: Воздушный транспорт, 1992. – 536 С. Прочность и динамика узлов авиационных газотурбинных двигателей: /Конспект лекций, под ред. Умушкина Б.П./ – М.: МГТУ ГА, 1994. – 104 С. Макаров, Н.В. Конструкция и эксплуатация авиационных двигателей, воздушных судов и авиационные материалы [Текст]: Методические указания к выполнению I части курсового проекта «Авиационные двигатели» / Н.В. Макаров. – Л.: ОЛАГА, 1990. – 48 С. Богданов, А.Д. Авиационный турбовинтовой двигатель ТВ2-117 [Текст]: Учебное пособие для авиац.-техн. училищ гражд. авиации / А. Д. Богданов, И. Г. Хаустов. – М.: Транспорт, 1970. – 371 С. Иноземцев, А. А. Основы конструирования авиационных двигателей и энергетических установок [Текст]: учебник для студентов высших учебных заведений / А. А. Иноземцев, М. А. Нахамкин, В. Л. Сандрацкий. – М.: Машиностроение, 2008. – 207 С. Кулагин В.В. Теория, расчет и проектирование авиационных двигателей и энергетических установок: Учебник. 2-е изд. Кн. 1. Основы теории ГТД рабочий процесс и термогазодинамический анализ. Кн. 2. Совместная работа узлов выполненного двигателя и его характеристики.- М.: Машиностроение, 2003. – 616 С. Руководство по технической эксплуатации ТВ2-117 Приложение АРешение дифференциального уравнения простейшей колебательной системы В случае свободных колебаний уравнение, описывающее движение простейшей колебательной системы с одной степенью свободы (рисунок А.1) можно записать в следующем виде: m · a + k · x = 0,  (А.1) (А.1)где: a – ускорение точечной массы m (произведение m·a представляет силу инерции, действующую на массу m); k · x – произведение, представляющее силу упругости, с которой упругий стержень действует на массу m. 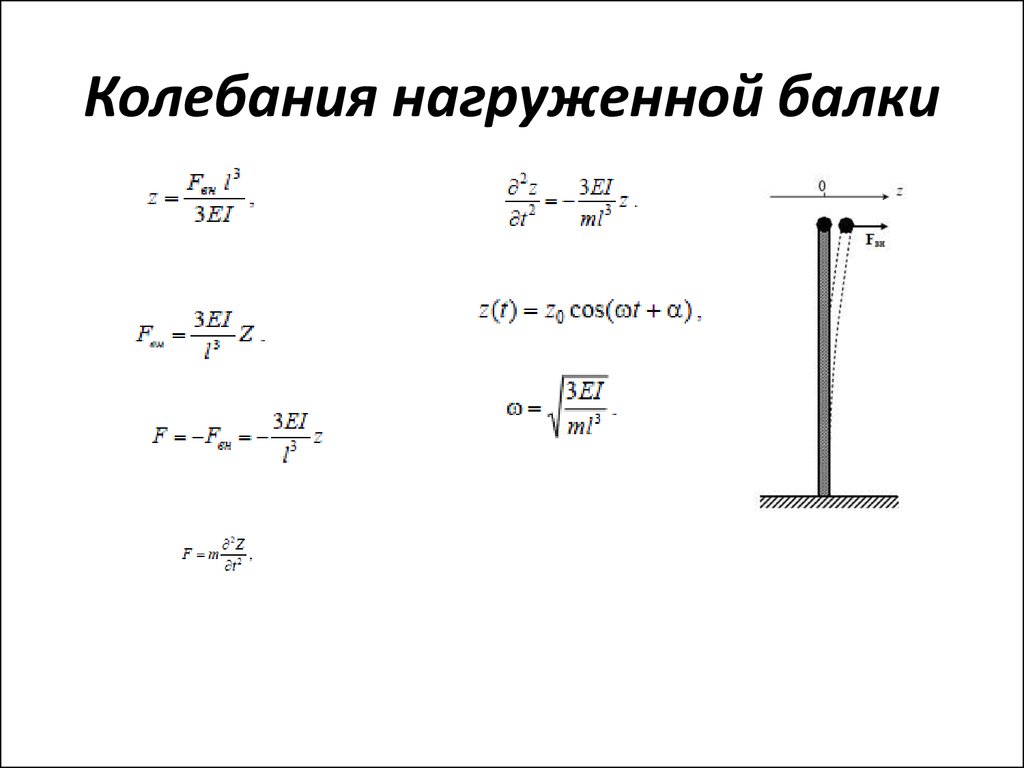 Рисунок А.1 – Простейшая колебательная система с одной степенью свободы В соответствии со схемой системы (рисунок 1) и режимом колебаний никакие другие силы на стержень и массу m не действуют, поэтому в левой части уравнения (А.1) слагаемых больше нет, а правая его часть равна нулю. Поскольку ускорение свободного конца стержня a равно второй производной от его координаты x по времени t, уравнение (А.1) может быть представлено в следующем виде:
Разделив левую и правую части уравнения (А.2) на массу m, получим:
Уравнение (А.3), которое представляет собой обыкновенное(содержащее один аргумент – t), линейное(в уравнении присутствуют искомая функция x(t) и ее производные только в первой степени), однородное(правая часть уравнения равна нулю) дифференциальноеуравнение, может быть решено с помощью подстановки x(t) = eλ·t. Выполнив эту подстановку и взяв вторую производную в первом слагаемом левой части уравнения (3), получим:
Разделив левую и правую части уравнения (А.4) на eλ·t и обозначив k/m = ω2, придем к так называемому характеристическомууравнению:
Характеристическое уравнение (А.5) является алгебраическим, из него может быть найден параметр λ:
где:  - мнимая единица. - мнимая единица.В соответствии с теорией обыкновенных дифференциальных уравнений общим решением исходного дифференциального уравнения (А.3) будет следующее выражение:
где: С1 и С2 - постоянные числа (в общем случае – комплексные), которые могут быть определены по заданным начальным условиям; eiωt и e-iωt - частные решения уравнения (А.3). Выберем в качестве начальных условий момент начала свободных колебаний, когда при t = 0 после мгновенного приложения возмущающей силы свободный конец упругого стержня занял положение, соответствующее координате x0, при этом dx(t)/dt = 0. В этом случае, учитывая, что e0 = 1, из уравнения (А.7) получим:
Из равенства (А.8) видно, что сумма коэффициентов С1 и С2 (являющихся в общем случае комплексными числами) равна действительному числу x0: C1 + C2 = x0 . Такое равенство может быть справедливым в двух случаях: - когда С1 и С2 являются действительными числами; - когда С1 и С2 - комплексно сопряженные числа вида: C1 = a+b·i, C2 = a-b·i(при сложении С1 и С2 их мнимые части взаимно уничтожаются). Заметим также, что сомножители eiωt и e-iωtв слагаемых правой части уравнения (А.7) также являются комплексно сопряженными. В этом можно убедиться, записав их в тригонометрической форме:
Используя правила умножения комплексных чисел, можно показать, что комплексно сопряженными являются и входящие в правую часть уравнения (А.7) слагаемые C1·eiωtи C2·e-iωt. Таким образом, из уравнения (А.7) следует, что решение исходного уравнения (А.3) лежит в комплексной плоскости и представляет собой совокупность сумм двух комплексно сопряженных чисел Z1(ωt) = C1·eiωtи Z2(ωt) = C2·e-iωt. Графическая иллюстрация этого решения приведена на рисунке А.2.  Рисунок А.2 – Графическая иллюстрация решения дифференциального уравнения, описывающего собственные колебания простейшей колебательной системы с одной степенью свободы. Векторы Z1(ωt) и Z2(ωt), изображающие соответствующие комплексные числа, располагаются симметрично относительно действительной оси x под углами ωtи - ωt к ней. Геометрическая сумма векторов Z1(ωt) и Z2(ωt) определяет координату свободного конца упругого стержня в данный момент времени t. Углы ωtи - ωtизменяются пропорционально времени t. Векторы Z1(ωt) и Z2(ωt) описывают процесс колебаний, вращаясь вокруг начала координат комплексной плоскости в противоположные стороны. Параметр ω имеет смысл угловой скорости вращения этих векторов. В теории колебаний ω называется круговой или угловой частотой и имеет размерность рад/с. С помощью соотношений (А.9) и (А.10) полученное на комплексной плоскости решение (А.7) может быть преобразовано в тригонометрическую форму. Подставляя соотношения (А.9) и (А.10) в решение (А.7), получим:
Выбранные нами ранее начальные условия t = 0, x(0) = x0 позволили определить, что C1 + C2 = x0. Рассмотрим теперь момент времени t±π/2, соответствующий углам поворота векторов Z1 и Z2, равным π/2 и - π/2, соответственно. Из рисунка 2 видно, что в момент времени t±π/2 векторы Z1 и Z2 лежат на мнимой оси yи направлены в разные стороны. При этом действительные части x(t±π/2) = 0. Тогда в соответствии с полученным решением (А.7):
откуда:
Комплексно сопряженные числа eiωt и e-iωt в общем виде могут быть представлены следующим образом:
Подставив выражения (А.14) и (А.15) в уравнение (А.13), получим:
Из рисунка А.2 видно, что в рассматриваемый момент времени tπ/2 комплексные числа Z1 = С1·a +С1· b·iи Z2 = - С2·a +С2· b·i являются чисто мнимыми, при этом их действительные части равны нулю: С1·a = 0, - С2·a = 0. Поэтому уравнение (А.16) может быть записано в следующем виде:
откуда следует, что С1 = С2. Учитывая полученный ранее результат C1 + C2 = x0, определяем значения постоянных С1 и С2 для выбранных начальных условий: С1 = С2 = x0/2. Возвращаясь к тригонометрической форме решения исходного дифференциального уравнения (А.11) и учитывая равенство С1 = С2, получаем:
Здесь сумма коэффициентов C1 + C2 представляет собой амплитуду колебаний А, равную максимальным по модулю отклонениям свободного конца упругого стержня : C1 + C2 = A = max {| x(t)|}. С учетом этого равенства можно записать решение дифференциального уравнения, описывающего собственные колебания простейшей колебательной системы с одной степенью свободы в окончательном виде:
где ω - циклическая частота колебаний. 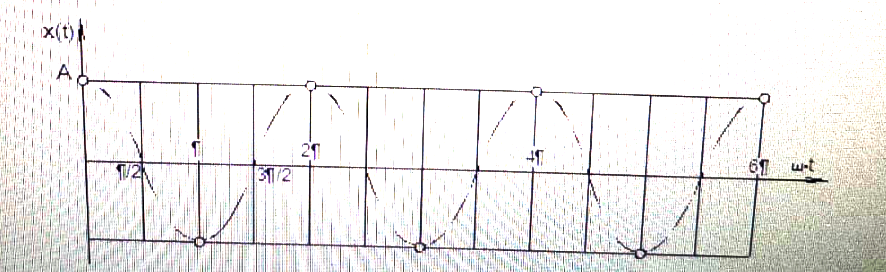 Рисунок А.3 – Зависимость координаты х свободного конца стержня от времени t в процессе свободных колебаний без затухания |

 ;
;  ,
, ,
,