Лабораторная работа 1 Основы измерений и обработки результатов
 Скачать 5.67 Mb. Скачать 5.67 Mb.
|

Экспериментальная установка и методика измерений. Экспериментально измерив время падения тела с высоты О Рис. 2.2. Экспериментальная установка сновным конструктивным элементом установки (рис. 2.2) является штатив (1), по длине которого может перемещаться электромагнит (2), к которому притягивается шарик (3). Электромагнит снабжён указателем высоты шарика (4) по линейке (5). Время падения шарика определяется по секундомеру (6). В момент перевода ключа К – «Пуск» из положения (а) в положение (б) электромагнит отключается, шарик начинает падать и включается секундомер. Когда падающий шарик размыкает контакты (7) секундомер отключается. Сначала на установке проверяется зависимость (2.10). Для этого шарик устанавливается на высоту В следующем опыте определяется ускорение свободного падения. Для этого шарик поднимается на максимально возможную высоту и многократно измеряется время его падения с этой высоты. Обработка результатов эксперимента1. Выбрать различные пары измерений 2. Рассчитать погрешности измерений величин  , (2.11) , (2.11)где 3. Провести сравнение величин  (2.12) (2.12)с учётом рассчитанных в п. 2 погрешностей. 4. Ускорение свободного падения рассчитать по формуле где 5. Рассчитать погрешность измерения величины где  , ,где Лабораторная работа 3 Баллистический маятник Цель работы: изучение закона сохранения импульса при неупругом ударе, определение скорости полета пули методом баллистического маятника. Основные теоретические положения Баллистический маятник представляет собой тяжелое тело, подвешенное на двойных нитях. В маятник стреляют по горизонтали пулей, которая застревает в нем. Пуля сообщает маятнику некоторую скорость, в результате чего маятник отклоняется. Измеряют величину отклонения маятника и по ней определяют скорость пули. Таким образом, методом баллистического маятника можно косвенно измерить скорость пули. Если время соударения пули с маятником мало по сравнению с периодом колебаний маятника, то маятник не успевает заметно отклониться от исходного положения за время соударения. Это значит, что во время удара не возникнут силы, стремящиеся вернуть маятник в исходное положение, и систему пуля – маятник можно рассматривать как замкнутую. Удар пули, при котором она застревает в маятнике, является неупругим. При неупругом ударе выполняется закон сохранения импульса, который для системы из двух тел имеет вид где После удара маятник с пулей будет двигаться по дуге радиуса Кинетическая энергия системы сразу после удара пули равна Из уравнений (3.2) и (3.3) выразим скорость пули Поскольку масса пули во много раз меньше массы маятника, величиной  П Рис. 3.1. Баллистический маятник роизводить непосредственное измерение высоты Из рис. 3.1 видно, что высота отклонения выражается через угол отклонения следующим образом: при условии, что угол С учетом этого скорость пули из формулы (3.4) выражается следующим образом: Выразим высоту подъема центра масс маятника через величину его отклонения М 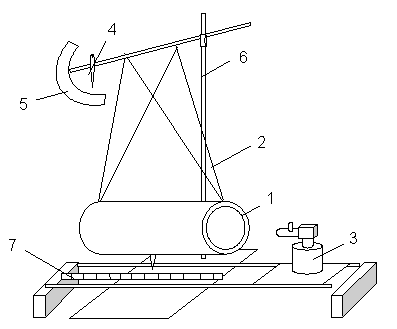 етодика эксперимента етодика экспериментаУ Рис. 3.2. Схема экспериментальной установки становка состоит из штатива 6, на котором на двойном подвесе 2 закреплен баллистический маятник 1 в виде трубки, заполненной ватой (рис.3.2). Напротив открытого конца трубки на той же высоте располагается пистолет 3. Для измерения угла отклонения маятника после попадания в него пули служат стрелка 4 и транспортир 5. К корпусу маятника прикреплен указатель, позволяющий контролировать отклонение маятника по горизонтали. Измерение горизонтального отклонения производится по линейке 7, которая крепится к подставке. Последовательность выполнения работы. 1 способ. Определение скорости по измерению угла отклонения маятника. Отмечают положение стрелки 4 на шкале транспортира 5 – начальный угол Определяют угол отклонения маятника Опыты проводятся с двумя пулями массами 2 способ. Определение скорости по измерению горизонтального отклонения маятника. По линейке 7 отмечают начальное положение Определяют перемещение маятника по горизонтали Опыты проделывают 5−7 раз с двумя пулями разной массы. Масса Обработка результатов эксперимента Вычислить последовательно средние значения величин Величину Для второй пули производятся такие же расчеты. Расчет погрешностей. Погрешность косвенных измерений скорости пули, выполняемых первым способом, рассчитывается по формуле В (3.9) входит погрешность прямых измерений угла где Погрешность косвенных измерений скорости пули, выполняемых вторым способом, рассчитывается по формуле В этом случае погрешность прямых измерений отклонения маятника по горизонтали находят по формуле Результат для каждого способа представить в виде: Дополнительное задание:Определение скорости пули по дальности полета при горизонтальной стрельбе. Движение тела, брошенного горизонтально с некоторой высоты, представляет собой два одновременных движения: равномерное по горизонтали и равноускоренное по вертикали с ускорением, равным ускорению свободного падения (рис. 3.3). Дальность полета, то есть перемещение по горизонтали определяется по формуле. Т 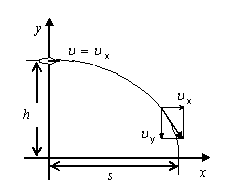 аким образом скорость полета пули может быть рассчитать по формуле аким образом скорость полета пули может быть рассчитать по формулеРис. 3.3 Принцип независимости движений. Методика эксперимента В этом задании используется только пистолет 3, который разворачивают к краю стола, чтобы пуля не попадала в маятник. Измеряют высоту пистолета над столом Проводят измерения дальности полета для двух других значений высоты пистолета Обработка результатов эксперимента Для каждого значения высоты пистолета над столом находят среднее значение дальности полета Определяют погрешность прямых измерений дальности полета по формуле Находят случайную составляющую погрешности косвенных измерений скорости пули: Приборную погрешность величины скорости Суммарную погрешность косвенных измерений величины  . (3.18) . (3.18) Результат представить в виде: Лабораторная работа 4 Математический маятник Цель работы: изучение гармонических колебаний, экспериментальная проверка зависимости периода колебаний маятника от его длины; определение ускорения свободного падения. Основные теоретические положения Колебательным движением или колебанием называется такое движение, при котором тело остается вблизи некоторого положения равновесия. В качестве примеров колебаний на рис. 4.1 приведены математический, пружинный и физический маятники. Если положение системы в любой момент времени может быть описано единственным параметром, то говорят, что система имеет одну степень свободы. Для всех систем с одной степенью свободы, вне зависимости от их физической природы, закон движения имеет одну и ту же математическую форму. Получим ее на примере пружинного маятника (рис. 4.1). На первом этапе рассмотрения силу сопротивления не учитываем. Рис. 4.1. Различные механические колебательные системы-маятники: математический, пружинный, физический  Определим положение точки массой mее смещением xиз положения равновесия, в котором x = 0. Сила упругости имеем: И  з уравнения (4.1), описывающего колебания в среде без сопротивления − свободные колебания, следует, что движение точки под действием возвращающей силы происходит таким образом, что ее ускорение з уравнения (4.1), описывающего колебания в среде без сопротивления − свободные колебания, следует, что движение точки под действием возвращающей силы происходит таким образом, что ее ускорение Для того чтобы определить закон колебательного движения, необходимо решить дифференциальное уравнение (4.1), то есть найти зависимость Рис. 4.2. Зависимость смещения x при гармонических колебаниях от времени при ×− положения крайнего отклонения. где Начальная фаза  ение колеблющейся точки в начальный момент времени ение колеблющейся точки в начальный момент времени Н Рис. 4.3. Положение колеблющейся точки в различные моменты времени аряду с циклической частотой можно ввести частоту Вычислим период колебаний математического маятника (см. рис. 4.1). Из треугольника сил видно, что Из формулы (4.3) следует, что период колебаний математического маятника не зависит от массы груза. Поэтому для данного положения на Земле и для определенного значения gпериод зависит только от длины подвеса l. В частности, в той степени, в какой справедливо приближение Определим теперь период колебаний математического маятника в зависимости от амплитуды. На основании закона сохранения энергии и рис. 4.1 имеем Из равенства (4.4) легко найти круговую частоту и период колебаний: где К(k)=  − полный эллиптический интеграл первого рода. − полный эллиптический интеграл первого рода. При малых колебаниях, когда выполнено Нетрудно увидеть, что при Лабораторная установка и проведение эксперимента. М   3  4  1 2 2 атематический маятник представляет собой груз 1, подвешенный на длинной тонкой нити 2 (рис. 4.4). За длину маятника принимается расстояние от подвижной точки подвеса до центра масс груза. Свободный конец нити зажат в подвесе 2, закреплённом на зажиме 3 штатива 4. Время качаний определяется секундомером с помощью оптических датчиков, а угол отклонения – по специальной линейке 5.  1 З 5  адание 1. Изучение зависимости периода малых колебаний от амплитуды. адание 1. Изучение зависимости периода малых колебаний от амплитуды. М Рис. 4.4. Общий вид установки  5 аятник откланяется от положения равновесия на небольшой угол и без толчка отпускается. Определяется время, в течение которого маятник сделает nполных колебаний, за одно полное колебание шарик проходит путь, равный четырём амплитудам. Изменяется начальное отклонение шарика и определяется время колебаний. Обработка результатов и расчёт погрешностей 1. Погрешности периода колебаний 2. При проверке независимости периода колебаний от амплитуды сравниваются периоды для различных амплитуд и находится такая величина  . Это означает, что при амплитуде колебаний . Это означает, что при амплитуде колебаний Задание 2. Изучение зависимости периода малых колебаний от длины маятника. Изменяется длина маятника l и определяется период колебания. При этом масса маятника не изменяется, а амплитуда выбирается такой, при которой период не зависит от амплитуды. Для каждого значения длины маятника определяется время отклонений. Обработка результатов и расчёт погрешностей При обработке данных проверяется соотношение:  (4.7) (4.7) Точность выполнения этого соотношения можно определить следующим образом: Вычислить систематическую погрешность величины  , (4.8) , (4.8)где Погрешность косвенных повторных измерений величины  . (4.9) . (4.9)Случайные погрешности величин Результаты расчётов проверить сравнением пар экспериментальных данных с учётом рассчитанных погрешностей. Задание 3. Изучение зависимости периода малых колебаний от массы маятника. Исследуется зависимость периода колебаний от массы маятника. Для этого изменяется масса маятника и остается неизменной его длина. Определяется период колебаний, и результаты опытов заносятся в таблицу. Обработка результатов и расчёт погрешностей Обработку результатов таблицы провести по п. 1 задания 1. Сравнить периоды колебаний для различных масс груза и показать независимость периода от массы. При этом должно выполняться равенство  . (4.10) . (4.10)Задание 4. Измерение ускорения свободного падения. Используются результаты, полученные в задании 1, 2 или 3. Обработка результатов и расчёт погрешностей. Ускорение свободного падения рассчитать по зависимости, следующей из (4.3):  , (4.11) , (4.11)где время Погрешность случайных косвенных измерений величины g рассчитать по формуле где величины Погрешность приборных косвенных измерений величины g рассчитать по формуле Полученную погрешность вычислить по формуле  . (4.14) . (4.14)Результаты представить в виде: Задание 5. Изучение больших колебаний математического маятника. При фиксированной массе груза и длине маятника измерить зависимость периода колебаний от угла отклонения маятника Обработка результатов и расчёт погрешностей. 1. Погрешности периода колебаний 2. Построить зависимость нормированного теоретическим значением (4.3) 3. На том же графике для данной длины маятника по формуле (4.5) построить нормированную теоретическую зависимость периода колебаний от угла первоначального отклонения маятника. 4. На том же графике для данной длины маятника по формуле (4.6) построить приближённую нормированную теоретическую зависимость периода колебаний от угла первоначального отклонения маятника. 5. Сравнить графики и найти величину отклонения, при которой выполняется приближение малых колебаний. Сравнить её с величиной Лабораторная работа 5 УПРУГИЙ УДАР |