 
|
латентная выносливость
|
преодоления всей дистанции ко времени преодоления короткого отрезка.
Пример. Дано: дистанцию - 400 м спортсмен пробегает за 48 с, а 100 м (эталон) - за 11 с. Коэффициент выносливости определяют: КВ = tg /
tдэт = 48 /11 = 4,36.
|
101
|
Что такое «Запас скорости» (ЗС)
|
Это разность между средним временем преодоления эталонного короткого отрезка (например, 100м) и лучшим временем на этом отрезке (400м). ЗС = tg / n
- tэт = 48 / 4 - 11 = 1с, где n = 400м / 100м = 4. Чем меньше запас скорости, тем выше выносливость. С ростом мастерства запас скорости уменьшается. Например, у сильных бегунов на 400м он равен 1с, а
у начинающих - 3с.
|
102
|
По каким критериям оценивается экономичность работы
|
Валовый коэффициент KI = A / E, где А - выполненная механическая работа (в Джоулях), Е - затраченная энергия (в Джоулях) (МПК или ЧСС);
Нетто-коэффициент: К2 = А / Е - Еn (МПК или ЧСС);
Дельта-коэффициент: К3 = (A2 - A1 ) / (Е2 - Е1), где А1 и А2 - величины работ в Джоулях (например, при педалировании с мощностью 50 и
250 Вт определяют энергозатраты Е1 и Е2, а выполненная работа А1 и А2 равна 5000Дж и 25000Дж, соответственно).
На одинаковую работу различные спортсмены затрачивают разную энергию. Например, на дистанции 150м в плавании кислородный запрос у третьеразрадников равен 5500 мл/мин., а у мастеров
спорта 2700 мл/мин., т.е. в 2 раза меньше.
|
103
|
Каковы пути повышения экономичности двигательной деятельности спортсмена
|
Снижение величины энергозатрат в каждом цикле (шаге). Осуществляется за счет:
а) устранением ненужных движений (качание из стороны в сторону в гребле);
б) устранение ненужных сокращений мышц. Это достигается концентрацией активности мышц, в легкости, свободе движений;
в) уменьшение сопротивления Среды;
г) уменьшение внутрицикловых колебаний скорости;
д) выбора оптимального соотношения между длиной и шириной шагов.
Рекуперация энергии, т.е. преобразование кинетической энергии в потенциальную и обратно. ОЦМ движется как шарик с увеличением кинетической энергии на подъемах и снижении потенциальной на спусках.
Кинетическая энергия превращается в потенциальную энергию упругой деформации мышц, а накопленная потенциальная энергия идет на сообщение скорости телу и его подъем.
Рациональное использование упругих сил мышц
|
|
|
повышает экономичность работы в два раза.
|
Система движения и организации управления движениями
|
104
|
Двигательные действия это
|
Действия спортсмена - его спортивная техника - выполняются посредством множества движений. Система движений - ее состав - это те движения, те
элементы, из которых оно состоит.
|
105
|
Структура системы движений
|
это наиболее сложившиеся и определяющие закономерности взаимодействия ее элементов (т.е. подсистем). Между множеством элементов объединенных в систему движений имеются очень сложные закономерности взаимодействия и взаимосвязи. Поэтому неизбежны и внутренние помехи. Например, рассогласование тяги мышц при прыжке вверх с места. В сложных биокинематических цепях возникает много внутренних сил - реакционных, инерционных, упругих и т.д., которые взаимодействуют друг с
другом хаотично.
|
106
|
Двигательная структура – это
|
закономерности взаимосвязи движений в системе движений в пространстве и во времени (кинетическая структура), а также силовых и энергетических взаимодействий (динамическая
структура).
|
107
|
Управление - это
|
процесс достижения цели, представляющий собой изменения состояния системы посредством управляющих воздействий, которые направлены на
достижение цели.
|
108
|
Цель управления – это
|
знание конечного результата (укол в фехтовании,
длина в прыжке и т.д.).
|
109
|
С позиций управления системой движений спортсмен представляет собой
|
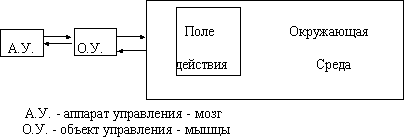
Самоуправляющуюся систему. Она включает в себя две подсистемы: управляющую и исполнительную, которые соединены каналами прямой и обратной связи между собой и окружением.
|
110
|
Что представляет собой информация в системе движений
|
это сообщение о состоянии и изменении внешнего окружения и организма, а также команды подсистем исполнения, обеспечения и управления.
При выполнении физических упражнений важное значение имеет самоконтроль на основе отчетливых двигательных представлений и понимания механизма движений. Например, построение системы движений (нового упражнения): рассказ о его выполнении, описание, объяснение динамики действия и создание зрительного образа. В результате создается двигательное представление. Следующий этап - освоение, разучивание
упражнения (т.е. многократные повторения с
|
|
|
коррекцией тренера). Спортивно-техническое мастерство зависит от совершенства системы движений, которые в процессе тренировки
постоянно перестраиваются (должны совершенствоваться).
|
Основы вращательных движений
|
111
|
На какие виды
подразделяются механические перемещения
|
прямолинейные движения и криволинейные движения
|
112
|
Что является особенностью
движения тела (материальной точки) по окружности
|
То, что направление вектора линейного ускорения
не совпадает с вектором линейной скорости ее движения.
|
113
|
Что представляет собой
|
это воздействие удерживающего тела на
|
|
центростремительная сила
|
вращающееся. Она вызывает искривление
|
|
|
траектории в зависимости от массы, скорости и
|
|
|
радиуса вращения.
|
114
|
Центробежная сила (сила инерции)
|
это противодействие вращающегося тела искривлению его траектории, приложена к удерживающему телу. Обе силы приложены к различным точкам и поэтому не компенсируют друг друга. Она равны по модулю, но противоположны по направлению. Центробежная сила равна произведению массы тела на его центростремительное ускорение.
|
|
|

|
|
|
Для каждой частицы вращающегося тела ее центростремительное ускорение пропорционально квадрату ее линейной скорости и обратно пропорционально расстоянию от оси вращения.
|
|
|
Отсюда, величина центробежной силы (а также центростремительной) для каждой частицы
тела равна:
|
|
|
Центростремительная сила перпендикулярна к направлению линейных скоростей точек звена, поэтому изменить их величину не может. Она изменяет только направление скорости. Изменение же величины скорости при вращении происходит при наличии положительного или отрицательного тангенциального ускорения. Его может вызвать только сила перпендикулярная радиусу (параллельно касательной к траектории движения). Следовательно нужно различать силы (и их
составляющие) приложенные вдоль радиуса и перпендикулярные к нему.
|
115
|
Что изменяется под действием момента внешней
силы, приложенной к звену
|
Изменяется вращательное движение звена, увеличивается либо уменьшается его угловая
|
 
|
по касательной к траектории
|
скорость 
|
116
|
За счет чего достигается управление движениями вокруг осей (изменение кинетического момента системы)
|
Достигается за счет
приложения внешней силы (импульса момента силы) - ускорение или замедление вращения всего тела при сохранении позы;
изменения условий действия внешней силы. при закрепленной оси (приближением к ней и отдалением от нее) - ускорение или замедление вращения всего тела с изменением позы;
активного создания момента внешней силы (отталкиванием от опоры или притягиванием к ней)
ускорение или замедление вращения всего тела
при изменении позы.
|
117
|
Каким образом
осуществляется управление движениями вокруг осей с сохранением кинетического момента биомеханической
системы
|
Осуществляется внутренними силами посредством встречных движений.
|
118
|
Движения называются встречными
|
Если тягой мышц вызывать вращательное движение одной части системы, то остальная часть системы начнет вращаться в противоположную сторону. При этом кинетические моменты обеих сторон системы равны по модулю и противоположны по направлению. Следовательно, суммарный момент системы не изменится, если ни какие другие силы не оказывают влияния на систему, что возможно в
безопорной фазе движения (т.е. полете).
|
119
|
Любые оси вращения всего тела, проходящие через точку общего центра масс
биомеханической системы, называются
|
свободными.
|
120
|
На какие способы можно разделить управления движениями вокруг осей с сохранением кинетического
момента системы
|
простые - вращение вокруг одной оси;
сложные - вращение вокруг нескольких осей.
|
121
|
Охарактеризуйте простое вращение
|
это вращение тела вокруг продольной оси. Ориентация частей (поворачивающихся) в пространстве изменяется, но общая ориентация всей системы сохраняется (баскетбол, ручной мяч и т.д.). Изменяя момент инерции системы можно изменить скорость вращения. Но такой способ только изменит вращение, а создать вращение таким способом
нельзя.
|
122
|
Охарактеризуйте сложное вращение
|
Используя встречные движения можно создать изменения ориентации (вращения) всей системы: без опоры, без приложения сил, без начального вращения. Вращение свободного тела в полете происходит в виде сложного вращения вокруг трех
осей. Вначале встречная нутация частей тела (т.е.
|
|
|
тело сгибается), затем собственное вращение нижней и верхней частей тела и, наконец, процессия (круговое движение), обе части тела описывают конические поверхности, но в противоположных направлениях. От одного движения (нутации) вращения не произойдет, но тело изменит положение, затем следует снова нутация (выпрямление тела), снова изменение (вращение) тела (на какой-то угол) и снова нутация (сгибание тела) и т.д. Источником сил, вызывающих вращение частей тела относительно друг друга служат мышцы, соединяющие их. Если встречной нутации нет (тело выпрямлено), нет последующего сгибания, то верхние и нижние части тела будут вращаться встречно вокруг одной продольной оси (т.е. тело скручивается). Для усиления эффекта поворота используют маховые движения руками,
например, правая - вперед - вниз - назад, левая - назад - вниз - вперед.
|
123
|
За счет чего достигается управление движениями вокруг осей с сохранением кинетического момента системы
|
Достигается за счет:
скручивания и раскручивания тела вокруг продольной оси (одновременный встречный поворот) - изменение ориентации частей тела относительно друг друга в пространстве;
группирования и разгруппирования (приближение частей системы к свободной оси и отдаления то нее)
ускорение и замедление вращения всего тела;
изгибания туловища и круговыми движениями конечностей;
создания сложного поворота тела вокруг нескольких осей.
В практике при сочетании поворотов вокруг продольной и поперечной осей тела в полете всегда используют сочетания различных способов вращения биомеханической системы (изгибание
тела и движение рук).
|
Перемещающие движения
|
124
|
К характерным параметрам перемещающих движений следует относятся
|
действующие силы;
скорость перемещения;
точность перемещения;
направление перемещения;
взаимодействие тел.
|
125
|
В перемещающих движениях различают:
|
Параллельное действие сил, т.е. когда к телу приложено хотя бы две, возможно различные по величине и направлению силы, когда возможна взаимокомпенсация одной силы другой, и, значит, силы действуют взаимосвязано и одновременно. В борьбе характерно взаимодействие правой и левой руки одновременно с бедром и др. звеньями.
Последовательное действие силы при котором действие сил (группа мышц) может происходить
только последовательно друг за другом, т.е. мышцы
| |
 Скачать 0.93 Mb.
Скачать 0.93 Mb.