|
|
Биомеханика конспект лекций донской. Лекция. Биомеханика двигательных действий как систем целенаправленных движений
|
|
подвижных звеньев тела) необходимо закрепить суставы (более 240 степеней свободы, то есть 240 возможных передвижений). Это закрепление, фиксация суставов, обеспечивается силами мышечных тяг. Мышечные силы - это внутренние силы для тела человека. Мышцы своим напряжением обеспечивают сохранение позы и положения, они заставляют как бы “отвердеть” систему взаимно подвижных звеньев человеческого тела. Следует подчеркнуть, что для сохранения позы особую роль играют мышцы. Часто условия действия внешних сил таковы, что равновесие возможно (“крест” на кольцах, “флажок“ на шведской стенке) , но человек не может сохранить свое положение и позу потому, что недостаточно
сильны его мышцы. У разных людей свои предельные позы.
|
153
|
Что надо знать, чтобы задать силу
|
Чтобы задать силу, надо знать: 1) ее величину (модуль), 2) направление, 3) точку приложения. Силы, как вектора, можно вычитать, складывать, умножать.
Решение многих задач по определению условий равновесия тела под действием системы сил связано с операцией геометрического сложения (вычитания) сил.
Одним из условий равновесия является необходимость того, чтобы геометрическая сумма всех сил, то есть главный вектор был равен нулю:
|
|
|

|
|
|
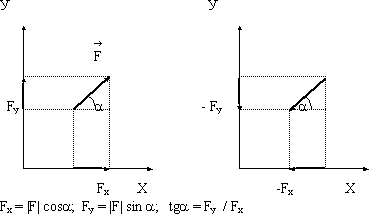
Силовой многоугольник должен быть замкнут (конец последней силы совпадает с началом первой). Если главный вектор не равен нулю, то система сил приводится к одной силе, а под действием одной силы тело не может находиться в равновесии. Проекция силы на ось. Часто при решении задач статики оперируют не векторами сил, а их проекциями на координатные оси (рис).
|
|
|
|
|
|
Рис.3.2 Проекция вектора силы на координатные оси.
Проекцией силы на ось называется скалярная величина, равная длине отрезка, заключенного
между проекциями начала и конца силы. Проекция
|
|
|
имеет знак “плюс”, если перемещение от ее начала к концу происходит в положительном направлении оси, и знак “минус” - если в отрицательном. Если
сила перпендикулярна оси, то ее проекция равна нулю.
|
154
|
Что называется моментом силы относительно точки на плоскости
|
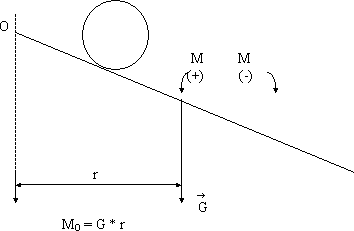
Моментом силы относительно точки на плоскости называется векторная величина, по модулю равная произведению силы на плечо силы (плечом силы является кратчайшее расстояние между точкой, относительно которой изменяется момент силы, и направлением действия силы). Пример: гимнаст на перекладине (рис.).
|
|
|
|
|
|
Рис. Момент силы тяжести гимнаста (МО) относительно оси перекладины. Момент силы тяжести гимнаста: Мо = G *r. Если
вращение почасовой стрелке, то такой момент отрицательный, и наоборот.
|
155
|
Что называется парой сил
|
Парой сил называется система двух равных по модулю, параллельных и направленных в противоположные стороны сил (рис.).
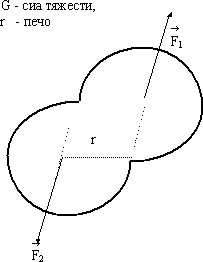
Система сил, образующих пару, не находится в равнодействии и не имеет равнодействующей. Действие пары сил на тело сводится к некоторому вращательному эффекту. Момент пары сил - это
произведение модулю одной из сил на плечо: М=±F*r.
|
156
|
Что называется
«Свободным телом»
|
Свободным телом называют тело, не связанное с
другими телами. Оно может перемещаться в любых направлениях под действием приложенных к нему
|
|
|
сил. Например, летящий мяч, ядро, тело спортсмена
в безопорной фазе.
|
157
|
Приведите примеры связи (соединения тел) тел друг с другом и направления векторов реакции связей
|
Обычно тела как то соединены, связаны друг
с другом, в результате чего перемещения этих тел ограничены. Одно тело ограничивает, мешает перемещению другого. Если тело ограничено в своих перемещениях, то говорят, что тело не свободно, на это тело наложены связи.
А Б
|
|
|
|
|
|
В Г
|
|
|
|
|
|
Д Е
|
|
|
|
|
|
Рис. Направление реакции связи при разных видах
связей
|
158
|
Что называется связью в механике
|
Связью в механике называется всякое другое тело, которое ограничивает перемещение тела (объекта) в определенном направлении. Пример связей: пол, гриф перекладины, торы колец и т.д. Для отдельных звеньев человеческого тела, соединенных друг с другом связями, ограничивающими их перемещения, являются такие анатомические
образования, как суставные поверхности, суставные сумки, связки мышцы.
|
159
|
Сила реакции связи
|
Сила с которой связь действует на тело, препятствуя его перемещению, называется силой реакции связи. По величине сила реакции связи равна силе давления нашего тела на связь и направлена в сторону, противоположную этому давлению. Реакция связи существует только тогда, когда
данное тело воздействует на связь. Реакция связей -
|
|
|
это реактивные (ответные) силы. При анализе физических упражнений необходимо уметь определять реакции связей (по величине и
направлению), так как реакция связей определяет характер воздействия связи на наше тело.
|
160
|
Основные виды связей
|
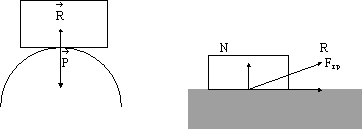
реакции идеально гладкой поверхности. Трением о такую поверхность можно пренебречь. Такая поверхность не дает телу перемещаться только вертикально вниз (по нормали к поверхности). Поэтому реакция связи идеально гладкой поверхности направлена перпендикулярно (по нормали) к поверхности соприкасающихся тел в точке их касания (рис. в ответе к вопросу № 157 (а));
реакция шероховатой поверхности. Такая поверхность не дает телу перемещаться вниз по нормали и вдоль поверхности. Направление реакции связи здесь заранее не известно. Поэтому в этом случае раскладывают полную реакцию связи на две составляющие по тем направлениям, по которым связь не дает перемещаться телу (рис в. №157 (б)): одна составляющая N - по нормали к поверхности, вторая составляющая Fтр - вдоль поверхности. По величине полная реакция связи равна:
 Направление реакции связи Направление реакции связи
определяется соотношением:

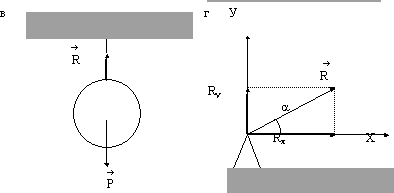
реакция стержня. Стержень не дает телу удаляться от точки подвеса. Поэтому реакция стержня или натянутой нити натянута вдоль стержня или натянутой нити в точке ее подвеса (рис. в. 157 (в);
неподвижная шарнирная опора. Реакция такой опоры проходит через ось шарнира и может иметь любое направление в плоскости чертежа (рис. в
№157 (г)). Необходимо разложить полную реакцию связи на ее составляющие Rx и Ry по направлению осей координат. По величине полная реакция связи
равна:  Направление ее определяется соотношением: Направление ее определяется соотношением:
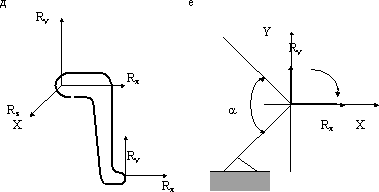
 Связи, наложенные на сустав, реализуются через анатомическое строение сустава (форма суставных поверхностей, суставные сумки, связки, мышцы, окружающие сустав). Реакция связи в плечелоктевом сочленении (блоковидный шарнир) имеет неопределенное направление в плоскости плечевой и локтевой кости (рис. в. №157 (д)). Связи, наложенные на сустав, реализуются через анатомическое строение сустава (форма суставных поверхностей, суставные сумки, связки, мышцы, окружающие сустав). Реакция связи в плечелоктевом сочленении (блоковидный шарнир) имеет неопределенное направление в плоскости плечевой и локтевой кости (рис. в. №157 (д)).
Реакция связи, возникающая в плечевом суставе (шаровой шарнир) имеет неопределенное
|
|
|
пространственное направление. Для определения направления реакции связи плоской фигуры реакцию связи заменяют двумя ее составляющими, Наиболее удобно за их направление взять вертикальную и горизонтальную составляющие. Реакция связи - это сила, которая препятствует поступательному перемещению одного звена относительно другого.
Но в суставе возможно еще и вращение звена относительно другого. В статической позе имеет место фиксация суставного угла между звеньями, то есть наложена связь на вращательное движение, а следовательно, имеет место момент реакции связи. Реализуется момент реакции связи через суставные мышечные моменты. Пример: соединение бедра и голени. Бедро является связью для голени. Реализуется эта связь через анатомические образования коленного сустава и мышцы, окружающие ко-ленный сустав. Какие на голень наложены связи? Коленный сустав не позволяет голени "оторваться" от бедра, то есть препятствует поступательному перемещению голени вдоль координатных осей Х и У (вправо - влево; вверх - вниз). Это первый вид связи. Кроме того, фиксированный в данной позе суставной угол a между бедром и голенью (фиксация этого угла осуществляется мышечными моментами) не позволяет голени вращаться относительно бедра. Это второй вид связи. Если мысленно отбросить связь (бедро), производя расчленение в коленном суставе, то действие связи на голень необходимо заменить (рис. в. №157 (е)):
в соответствии с первым видом связи - силой реакции связи (так как она имеет неопределенное направление в плоскости чертежа, то заменяем ее двумя составляющими, направленными вдоль координатных осей Rx и Ry);
в соответствии со вторым видом связи - момент реакции связи Мм. Направление составляющих реакции связи, а также момента реакции связи выбирается произвольно. Если в процессе решения задачи составляющие реакции или момент получатся отрицательными, значит действительное их направление будет противоположно тому, которое выбрано на чертеже. Определение сил реакции связи в суставе при удержании тех или иных статических положений позволяет оценить нагрузку на сустав (чтобы избежать травм). А определение моментов реакции связи позволяет рассчитать величину и направление управляющих мышечных моментов, которые
необходимо приложить, чтобы зафиксировать
| |
|
|
 Скачать 0.93 Mb.
Скачать 0.93 Mb.