Организация транспортных услуг. Лекциипо Орг.тр. усл УТС. Лекция по Организации транспортных услуг и безопасность транспотрных процессов
 Скачать 1.22 Mb. Скачать 1.22 Mb.
|

|
Первыйпредполагает исследование процессов, происходящих внутри потока, поэтому он получил название микроскопическое моделирование. Микроскопическое моделирование рассматривает транспортный поток как взаимное положение следующих друг за другом автомобилей и основано на теории следования за лидером. Предполагается, что основное влияние на изменение параметров движения конкретного автомобиля (ведомого) оказывает изменение скорости движения находящегося перед ним автомобиля-лидера. Исследования показали, что влияние на изменение скорости ведомого автомобиля начинается, когда временной интервал между ним и ведомым автомобилем составляет в городских условиях - 6 сек, вне населенных пунктов - 9 сек. Изменение ускорения ведомого автомобиля прямо пропорционально разности скоростей между ним и лидером и обратно пропорционально расстоянию между ними:   Представленная зависимость является простейшей линейной моделью следования за лидером. Более точные результаты можно получить, используя нелинейную модель, в которой учитывается зависимость поведения водителя от дистанции между автомобилями. Второй подход к изучению транспортных потоков рассматривает его как целостный процесс, характеризуемый только внешними параметрами. При таком подходе создаются макроскопические модели, которые рассматривают такие характеристики транспортного потока как скорость, интенсивность, плотность движения и т.п. Между скоростью движения, плотностью и интенсивностью движения существует соотношение Na = ?а qa,которое графически может быть изображено в виде так называемой основной диаграммы транспортного потока (рис. 2.3). 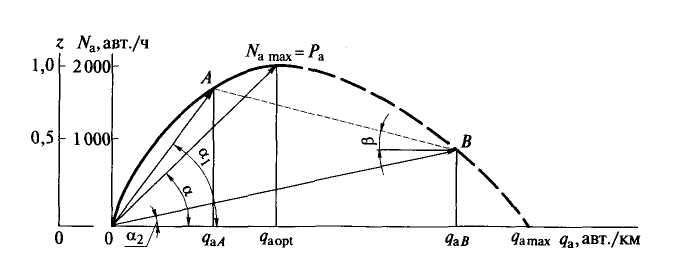 Рис. 2.3. Основная диаграмма транспортного потока Диаграмма отражает изменение состояния однорядного транспортного потока преимущественно легковых автомобилей в зависимости от увеличения его интенсивности и плотности. Левая часть кривой (показана сплошной линией) отражает устойчивое состояние транспортного потока, при котором по мере увеличения плотности транспортный поток проходит фазы свободного, затем частично связанногои связанногодвижения, достигая точки максимально возможной интенсивности - пропускной способности (точка Na max= Pa). В процессе этих изменений скорость транспортного потока падает - она характеризуется тангенсом угла наклона ? радиуса-вектора, проведенного от точки 0 к любой точке кривой, характеризующей изменение Na. Соответствующие точке Na max= Pa значения плотности и скорости транспортного потока считаются оптимальными по пропускной способности (qaopt и ?a opt). При дальнейшем росте плотности (за точкой Ра перегиба кривой) транспортный поток становится неустойчивым (эта ветвь кривой показана штриховой линией). Переход транспортного потока в неустойчивое состояние происходит вследствие снижения плавности движения, например при появлении препятствия на участке дороги, неблагоприятных метеоусловиях и т. п. Снижение скорости движения автомобилем - лидером группы требует торможения разной интенсивности последующих автомобилей, а затем и разгонов, что создает пульсирующий, неустойчивый поток. Резкое торможение транспортного потока (находящегося в режиме, соответствующем точке А) и переход его в результате торможений к состоянию по скорости и плотности в положение, соответствующее, например, точке В, вызывает так называемую «ударную волну» (показана тонкой штриховой линией АВ), распространяющуюся навстречу направлению транспортного потока со скоростью, характеризуемой тангенсом угла ?. «Ударная волна» является, в частности, источником возникновения попутных цепных столкновений, типичных для плотных транспортных потоков. В точках 0 и qmax интенсивность движения Na= 0, т.е. соответственно на дороге транспортные средства отсутствуют или транспортный поток находится в состоянии затора (неподвижности). Радиус-вектор, проведенный из точки 0 в направлении любой точки на кривой (например, Аили В), характеризующей Na, определяет значение средней скорости потока Плотность транспортного потока рассматривается как зависимая переменная, поскольку две другие (интенсивность и скорость движения) являются измеряемыми и независимыми переменными. Еще одним важным параметром, характеризующим транспортный поток, является наличие в его составе транспортных средств различного типа -состав транспортного потока. Состав транспортного потока влияет на загрузку дорог (стесненность движения), что объясняется, прежде всего, существенной разницей в габаритных размерах автомобилей: от длины 4...5 м для легковых автомобилей, до длины 24 м, характерной для автопоездов. Необходимо учитывать и различие в динамических характеристиках автомобилей различного типа. Оценка состава транспортного потока осуществляется по процентному составу или доле транспортных средств различных типов. Знание состава транспортного потока позволяет учесть степень занятости дороги движущимся автомобилем, выражением которой являетсядинамическая площадь автомобиля Sa. Таблица 2.1 Значения коэффициентов приведенияkпр i, по СНиП 2.05.02-85
| |||||||||||||||||||||||||||||||||||||||||||||||||||||||