курс. Курс лекций по ТАУ. Лекция Принципы управления 2 Общие понятия 2 Лекция Статический режим сау 7
 Скачать 1.6 Mb. Скачать 1.6 Mb.
|

4.2. САР напряжения генератора постоянного токаДля примера рассмотрим схему САР напряжения генератора постоянного тока (рис.37). 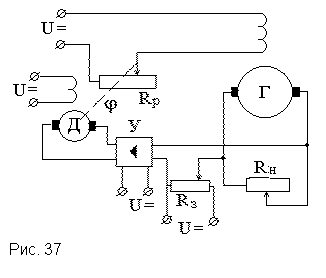 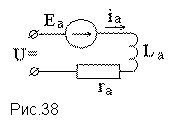 Выведем дифференциальное уравнение исполнительного двигателя постоянного тока. Его схема замещения изображена на рис. 38. Для якорной цепи справедливо уравнение Если принять, что 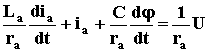 , , то есть где – постоянная времени якорной цепи; , – коэффициенты пропорциональнсти. Если учесть, что 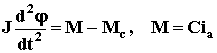 , где J – момент инерции якоря, M - электромагнитный момент, Мс – момент сторонних сил, то получим , где J – момент инерции якоря, M - электромагнитный момент, Мс – момент сторонних сил, то получимСледовательно  = > = > = > = > = > = >Здесь ; ; ; – коэффициенты пропорциональности; 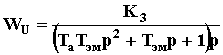 , , 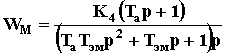 – передаточные функции по напряжению и моменту сторонних сил. – передаточные функции по напряжению и моменту сторонних сил.Структурная схема двигателя постоянного тока показана на рис.39. 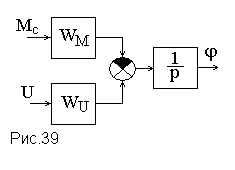 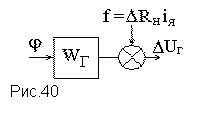 Аналогичным образом выводится передаточная функция генератора постоянного тока, которая с учетом пренебрежения индуктивностью обмотки якоря имеет вид, показанный на рис.40, где  . . Усилитель можно представить пропорциональным звеном с коэффициентом усиления Kу. В окончательном виде структурная схема САР напряжения генератора постоянного тока показана на рис.41. 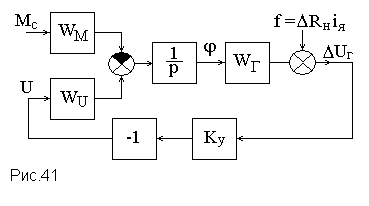 Лекция 5.Временные характеристики5.1. Понятие временных характеристикДля оценки динамических свойств системы и отдельных звеньев принято исследовать их реакцию на типовые входные воздействия, которые наиболее полно отражают особенности реальных возмущений. Во - первых, это позволяет сравнивать отдельные элементы между собой с точки зрения их динамических свойств. Во - вторых, зная реакцию системы на типовые воздействия, можно судить о том, как она будет вести себя при сложных изменениях входной величины. Наиболее распространенными типовыми воздействиями являются: ступенчатое, импульсное и гармоническое воздействия. Любой сигнал u(t), имеющий сложную форму, можно разложить на сумму типовых воздействий ui(t) и исследовать реакцию системы на каждую из составляющих, а затем, пользуясь принципом суперпозиции, получить результирующее изменение выходной величины y(t) суммируя полученные таким образом составляющие выходного сигнала yi(t). 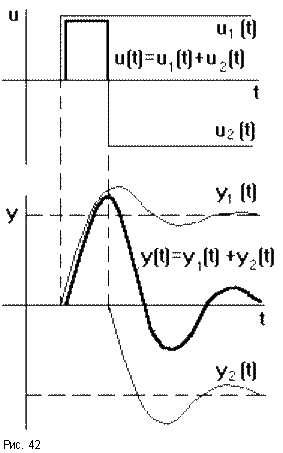 Особенно важное значение в ТАУ придают ступенчатому воздействию 1(t) =  . Все остальные воздействия могут быть сведены к нему. Так, например, реальный импульсный сигнал может быть представлен двумя ступенчатыми сигналами одинаковой величины, но противоположными по знаку, поданными один за другим через интервал времени t (рис.42). . Все остальные воздействия могут быть сведены к нему. Так, например, реальный импульсный сигнал может быть представлен двумя ступенчатыми сигналами одинаковой величины, но противоположными по знаку, поданными один за другим через интервал времени t (рис.42).Зависимость изменения выходной величины системы от времени при подаче на ее вход единичного ступенчатого воздействия при нулевых начальных условиях называется переходной характеристикой и обозначается h(t). Не менее важное значение в ТАУ уделяется импульсной переходной характеристике, которая описывает реакцию системы на единичное импульсное воздействие при нулевых начальных условиях, обозначают (t). Единичный импульс физически представляет из себя очень узкий импульс, ширина которого стремится к нулю, а высота - к бесконечности, ограничивающий единичную площадь. Математически он описывается дельта - функцией d(t) = 1’(t). Переходная и импульсная переходная характеристики называются временными характеристиками. Каждая из них является исчерпывающей характеристиками системы и любого ее звена при нулевых начальных условиях. По ним можно однозначно определить выходную величину при произвольном входном воздействии. Зная передаточную функцию W(p) = K(p)/D(p), выражение для переходной функции можно найти из формулы Хевисайда:  , где pk - корни характеристического уравнения D(p) = 0. Взяв производную от переходной функции можно получить выражение для импульсной переходной функции (t) = h’(t). , где pk - корни характеристического уравнения D(p) = 0. Взяв производную от переходной функции можно получить выражение для импульсной переходной функции (t) = h’(t). |