Насосное оборудование лекции Дерюшев Л.Г.. Насосное оборудование лекции Дерюшев Л.Г. Лекция Тема Введение. Классификация насосов и воздуходувных машин. Краткая история конструирования насосов и воздуходувных машин
 Скачать 17.95 Mb. Скачать 17.95 Mb.
|

|
Рис. 1. Характеристика системы «насос—сеть» при регулировании работы дросселированием N3 = Затрачиваемая мощность насосной установки в этом случае N = Тогда КПД насосной установки = N3/N = откуда видно, что КПД насосной установки уменьшается с увеличением разности между напором, развиваемым насосом, и напором, требуемым в сети. Из-за существенных недостатков (неэкономичность и возможность регулирования только в сторону уменьшения подачи) способ дроссельного регулирования можно применять только на имеющих плавную характеристику небольших насосных агрегатах, где регулирование требуется в течение короткого времени. Для устранения неустойчивой работы насосов применяют регулирование подачи насоса перепуском жидкости из напорной линии во всасывающую. Наиболее часто такое регулирование применяется в осевых насосах, у которых кривая мощности снижается с увеличением подачи. Перепуск жидкости во всасывающий трубопровод улучшает кавитационные качества насоса, но наличие циркуляции снижает КПД системы, требует устройства циркуляционного трубопровода и установки дополнительной арматуры, что усложняет коммуникации трубопроводов в помещении насосной станции. Поэтому данный способ не получил распространения в практике городского водоснабжения. Регулирование подачи впуском воздуха во всасывающий трубопровод является более экономичным, чем дросселирование, но позволяет только ограниченно изменять подачу из-за резкого ухудшения кавитационных качеств насоса. В системах водоснабжения этот способ вообще неприменим, так как нельзя подавать в сеть воду, смешанную с большим объемом воздуха. Наиболее экономичным является регулирование режима работы насоса изменением частоты вращения рабочего колеса. Изменение частоты вращения ведет к изменению характеристики Н-Qнасоса таким образом, что точка пересечения кривой Нi-Qiнасоса с характеристикой трубопровода соответствует требуемой подаче Qx при напоре Нх, т. е. сохраняется материальный и энергетический баланс системы. Частоту вращения рабочего колеса насоса можно изменять применением двигателей с переменной частотой вращения (электродвигателей постоянного тока, электродвигателей переменного тока с переключением обмотки на различное число пар полюсов, коллекторных электродвигателей, паровых и газовых турбин, двигателей внутреннего сгорания). На насосных станциях городского и промышленного водоснабжения наиболее широко применяют короткозамкнутые асинхронные электродвигатели, которые не допускают изменения частоты вращения. В этом случае для изменения частоты вращения рабочего колеса насоса можно соединить насос и электродвигатель с помощью регулируемой гидромуфты или электромагнитной муфты скольжения (ЭМС), либо применить асинхронный электродвигатель с вентильно-каскадным преобразователем. Введением сопротивления (реостата) в цепь фазного ротора асинхронного электродвигателя переменного тока также можно изменять частоту вращения, что дает существенный экономический эффект по сравнению с дроссельным регулированием. При малых мощностях регулирование включением сопротивления достаточно просто и надежно. При больших мощностях приходится включать крупные реостаты, и экономическая эффективность применяемого способа резко снижается. Кроме того, этот способ обладает следующими недостатками: уменьшаются пределы регулирования при малых нагрузках и усложняются конструкции двигателя вследствие добавления колец и щеток для подключения реостата. При применении асинхронных электродвигателей, имеющих обмотку на статоре, которая переключается во время работы двигателями на различное число пар полюсов, экономическая эффективность регулирования параметров Н и Qнасосов возрастает. Двигатели этого типа выпускаются двух-, трех- и четырехскоростными. Наиболее простым способом изменения частоты вращения ротора асинхронного электродвигателя является изменение частоты тока. В настоящее время разработаны частотные приводы с полупроводниковыми преобразователями, применение которых значительно повышает экономическую эффективность регулирования параметров насоса. Регулирование частоты вращения ротора фазного асинхронного электродвигателя возможно также с помощью каскадного соединения его с другими машинами. Различают два типа каскадного соединения: электромеханический каскад — энергия скольжения с ротора регулируемого электродвигателя через выпрямитель подается на якорь двигателя постоянного тока и возвращается (за вычетом потерь) на вал регулируемого электродвигателя с помощью механической связи между ними; электрический каскад — энергия скольжения с ротора регулируемого 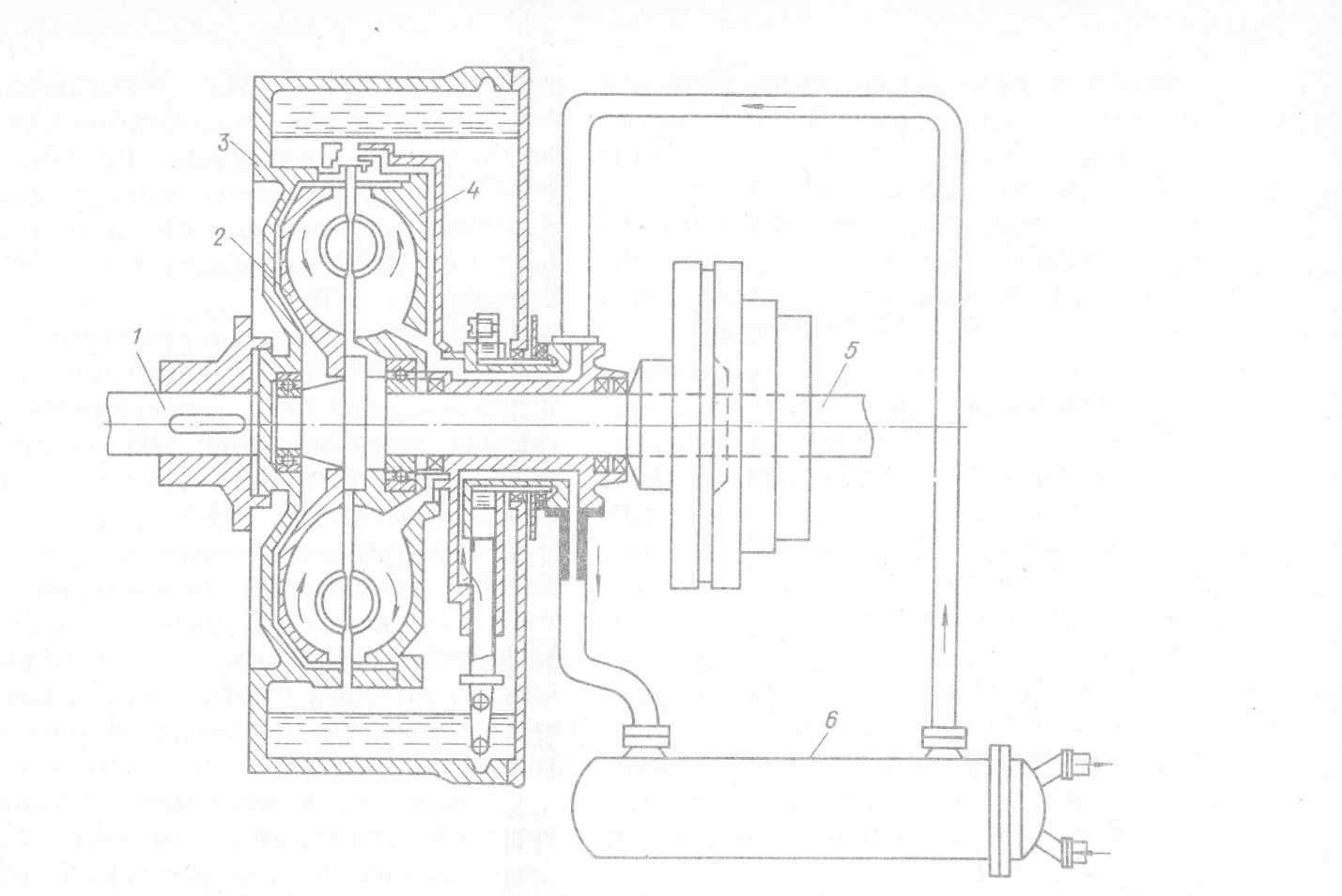 Рис. 2. Регулируемая гидромуфта переменного наполнения электродвигателя возвращается непосредственно в электросеть. Экономическая эффективность этого способа регулирования за последнее время значительно возросла в связи с применением полупроводниковых выпрямителей. Регулирование частоты вращения рабочего колеса насоса при постоянной частоте вращения ротора электродвигателя можно осуществить с помощью гидродинамической передачи (регулируемой гидромуфты). Рабочими элементами гидромуфты являются колесо центробежного насоса (рис. 2) и колесо турбины, размещенные в общем корпусе и предельно сближенные (зазор 3—10 мм). Рабочее колесо центробежного насоса насажено на ведущий вал (электродвигателя). Колесо турбины закреплено на ведомом валу (валу насоса), соосном с ведущим валом. При вращении ведущего вала рабочая жидкость, находящаяся в каналах колеса насоса, получает приращение механической энергии и передает ее лопаткам колеса турбины. При выходе из колеса турбины рабочая жидкость вновь попадает во всасывающие отверстия колеса насоса, и цикл повторяется. Основным способом регулирования частоты вращения ведомого вала является изменение наполнения рабочего пространства колес гидромуфты жидкостью. Потери в гидромуфте составляют около 2—3 %, поэтому полного равенства между частотой вращения ведущего и ведомого вала быть не может. Разность частоты вращения ведущего и ведомого валов, отнесенная к частоте вращения ведущего вала, называется скольжением гидромуфты: S = (n1—n2)/n1, где n1— частота вращения ведущего вала (двигателя); n2— то же, ведомого вала (насоса). Следовательно, частота вращения ведомого вала: n2 = г · n1 или г = n2/n1 (1) Из выражения (1) следует, что потери энергии в гидромуфте увеличиваются с уменьшением передаточного числа, т. е. они увеличиваются при возрастании глубины регулирования. Это обстоятельство является недостатком гидравлических муфт. Кроме того, гидравлические муфты конструктивно более сложны, чем насосы, и имеют слишком большие размеры, почти одинаковые с размерами насосов. Регулирование включением сопротивления в цепь ротора асинхронного электродвигателя и регулирование с помощью гидромуфты экономически равноценны, так как в том и другом случае потери энергии привода прямо пропорциональны передаточному числу (п2/п\). Основным достоинством регулирования частоты вращения с помощью гидромуфт является бесступенчатое, автоматическое и быстрое изменение частоты вращения ведомого вала. В последнее время созданы новые системы регулируемого электропривода, которые могут быть применены для изменения частоты вращения рабочего колеса центробежного насоса. К ним относятся приводы с электромагнитными муфтами скольжения (ЭМС). Электромагнитная муфта состоит из двух вращающихся частей — индуктора и якоря. Якорь жестко соединен с валом электродвигателя, имеющим постоянную частоту вращения, а индуктор — с валом насоса. Якорь и индуктор максимально сближены и имеют между собой небольшой воздушный зазор. При отсутствии электротока в обмотке индуктора крутящий момент электродвигателя не передается на вал насоса. При включении индуктора возникает электромагнитное поле, под воздействием которого индуктор с некоторым скольжением вращается вслед за якорем и передает крутящий момент от электродвигателя рабочему колесу насоса. Частота вращения индуктора зависит от силы тока возбуждения. В нашей стране выпускаются асинхронные, панцирные, индукторные и порошковые ЭМС. Анализ механических характеристик и конструкций ЭМС показывает, что в системах водоснабжения и канализации наиболее приемлемы ЭМС индукторного типа, коэффициент полезного действия которых при полном возбуждении ЭМС составляет 0,98. Регулирование параметров насоса изменением геометрии проточных каналов применяется в осевых насосах типа ОП (изменение угла установки лопастей рабочего колеса ). Регулирование режима работы насоса изменением кинематики потока на входе в рабочее колесо насоса осуществляется установкой поворотно-лопастного направляющего аппарата у входа в рабочее колесо. Поворотно-лопастный направляющий аппарат изменяет момент скорости (закрутку) потока на входе в рабочее колесо. При этом закрутка по направлению вращения рабочего колеса (положительная) уменьшает напор насоса, а против вращения (отрицательная) увеличивает напор. Этот способ регулирования допускает изменение подачи на 25 % при" понижении напора на 15 % и уменьшении потребляемой мощности на 30 % номинальной. КПД насоса при указанной глубине регулирования снижается на 2—3 %. Регулирование параметров насоса входным направляющим аппаратом наиболее эффективно в системах с малым статическим напором. На основании анализа работ по регулированию частоты вращения рабочего колеса центробежного насоса можно сделать следующие выводы: 1. Применение регулируемого привода значительно повышает экономические показатели насосных станций — экономия электроэнергии достигает 10—15 %. 2. Применение регулируемого центробежного насоса позволяет уменьшить число насосов на насосных станциях. 3. На группу из трех-четырех рабочих насосов достаточно иметь один регулируемый насос.
Влияние изменения уровня воды в источнике и напором резервуаре на режим работы насосов Геометрическая высота подъема воды насосов, устанавливаемых на насосных станциях / подъема, зависит от разности уровней воды в источнике и в смесителе водопроводных очистных сооружений. Однако уровень воды в поверхностных 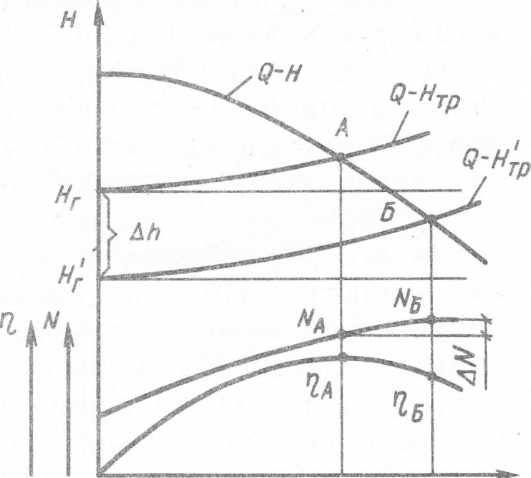 ОООQАQБQ л/с 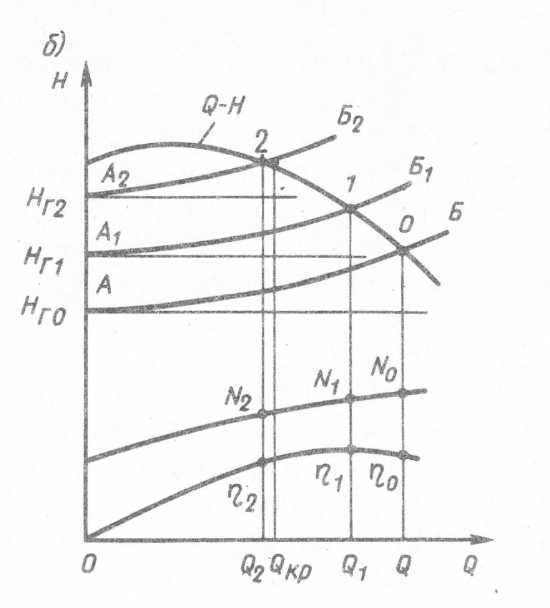 Рис. 2. Режим работы насосов а) при изменении уровня воды в источнике б) при повышении уровня воды в баке водонапорной башни источниках не остается постоянным и изменяется в зависимости от гидрологического режима источника. Рассмотрим режимы работы насоса при изменениях уровня воды в источнике от минимального до максимального. На рис.2, а приведены характеристики насоса Н- Qи характеристика напорного водоводаНтр-Q(геометрической высоты подъема Hг). Точка А пересечения характеристик насоса и водовода соответствует режиму работы системы «насос — водовод» при минимальном уровне воды в источнике. Координаты точки А должны удовлетворять требуемым подаче QAи напору НА. Потребляемая мощность в этом режиме работы NAи КПД а. С повышением уровня воды в источнике геометрическая высота подъема Hг, равная разности отметок уровней свободных поверхностей воды в источнике и в смесителе, будет уменьшаться, т. е. Hс-Hунв> Hс-Hувв и Нг> H, где Нс— отметка уровня воды в смесителе; Hунв — низкий уровень воды в источнике; Нувв — высокий (паводковый) уровень воды в источнике. Потери напора в трубопроводе практически остаются постоянными при данном расходе. Из анализа уравнения характеристики трубопровода H=Hr+SQ2следует, что Нг есть координата вершины квадратичной параболы при Q = 0. Следовательно, при уменьшении Hг уменьшается координата вершины характеристики трубопровода характеризуется новой режимной точкой Б, имеющей координаты Qs, HБ, NБи Б. Следовательно, при повышении уровня воды в источнике напор насоса уменьшается, подача и мощность увеличиваются, КПД насоса снижается. Увеличение мощности насоса вызывает перегрузку электродвигателя, его нагрев и уменьшение КПД двигателя, что может привести к выходу двигателя из строя. Во избежание перегрузки двигателя необходимо регулировать подачу насоса. При значительных колебаниях уровня воды в источнике целесообразно применять насосы с крутопадающей характеристикой Н-Q, при которой изменение подачи и мощности насоса будет меньшим, чем при пологой. Однако надо иметь в виду, что такие насосы имеют небольшую рабочую часть характеристики и изменение уровня воды может привести к работе насоса вне рекомендуемого поля. Если насосы подают воду в резервуары, то в момент повышения воды в источнике следует рекомендовать поддерживать максимально возможный уровень воды в резервуаре. Это мероприятие позволят снизить увеличение мощности электродвигателя, т.е. его перегрузку. На рис. 2 показан метод определения режимных точек работы насоса при подаче воды в бак башни графически. Характеристики трубопровода А-Б, А1-Б1, А2-Б2 построены для соответствующих уровней воды в баке при геометрических высотах подъема Нг о, HГ1 и HГ2. Система работает в режимных точках 0, 1 и 2. Из анализа графика работы системы «насос-сеть» следует, что при увеличении уровня воды в баке вследствие саморегулирующей способности насоса напор его увеличивается, а подача и мощность уменьшаются. При увеличении геометрической высоты подъема до Нг2 подача насоса Q2меньше ,критической подачи Qкp и режим работы насоса будет находиться в области неустойчивой работы со всеми последствиями, вытекающими из этого. Следовательно, насосы, работающие на напорные резервуары и безбашенные системы водопроводной сети, должны иметь пологие характеристики Н- Q без западающей ветви. При анализе режима работы насоса необходимо уточнять продолжительность работы насоса при различных уровнях воды в баке и в зависимости от этого подбирать насос с оптимальным КПД на диктующий уровень воды в баке. Параллельная работа насосов Параллельной работой насосов называется одновременная подача перекачиваемой жидкости несколькими насосами в общий напорный коллектор (рис. 3). Необходимость в параллельной работе нескольких одинаковых или разных насосов возникает в тех случаях, когда невозможно обеспечить требуемый расход воды подачей одного насоса. Кроме того, поскольку водопотребление в городе неравномерно по часам суток и по сезонам года, то подачу насосной станции можно регулировать числом одновременно работающих насосов. При проектировании совместной работы центробежных насосов нужно хорошо знать их характеристики; подбирать насосы следует с учетом характеристики трубопровода. Центробежные насосы могут работать параллельно при условии равенства Если один из насосов имеет напор меньше, чем другие, то он может быть подключен на параллельную работу только в поле рекомендуемой работы. При повышении напора в системе этот насос может принимать участие в работе, но его КПД будет падать. При достижении максимального напора подача насоса будет равна 0. Дальнейшее увеличение напора в системе приведет к закрытию обратного клапана и выключению насоса из работы. Поэтому для параллельной работы следует подбирать насосы однотипные с равными или незначительно отличающимися напорами и подачами. Различные схемы параллельной работы насосов применяются весьма часто для водоснабжения и перекачивания сточных вод, где целесообразно подачу от нескольких насосов или станций объединять в общий коллектор. Расчет режима работы по таким схемам можно производить аналитическим или графическим способом. В практике проектирования насосных станций наибольшее распространение получил графический способ. При параллельной работе насосов в сеть возможны следующие варианты компоновки системы «насосы — сеть»: в системе работает несколько насосов с одинаковыми характеристиками; в системе работает несколько насосов с разными характеристиками; насосы подключены к общему трубопроводу на близком расстоянии друг от друга  (см. рис. 3), т. е. потери напора от насоса до напорного водовода считают равными для всех установленных насосов, или же насосы находятся на достаточно большом расстоянии друг от друга, т. е. разности потерь напора от насоса до присоединения к общему напорному трубопроводу необходимо учитывать. Параллельная работа нескольких насосов с одинаковыми характеристиками. При построении характеристики нескольких параллельно работающих насосов на общий напорный трубопровод суммируют подачи насосов при равных напорах. Рассмотрим построение графической характеристики трех параллельно работающих насосов типа Д800-57 на два одинаковых трубопровода. В координатах Q,Н, N, и h наносим паспортные энергетические характеристики насоса Д800-57. Так как насосы одинаковые, то характеристики совпадают и их обозначают Н-Q, , (см. рис. 3). Для построения суммарной характеристики Н-Q, , произвольно выбираем напоры НА,НБ и Нвв пределах рекомендуемой рабочей части характеристики Н-Q, , складываем подачи Qa,QбQb. Длядвух параллельно работающих насосов A' =2QA, Б' =2QБи В' =2QB,для трех насосов A" = 3QА, Б" = 3QБ и В" = 3Qв. По полученным точкам А', Б' и В строим суммарную характеристику Н-Q, ,двух параллельно работающих насосов, а по точкам А", Б" и В" характеристику Н-Q, , трех насосов. Аналогичным построением находим характеристику Н-Qтр 1+2 параллельной работы двух напорных трубопроводов. Суммарную фактическую подачу двух насосов на два водовода определяют по координатам Q1+2 и Нбточки Б',т. е. точки пересечения характеристик Н-Q1+2 и Н-Qтр 1+2. Суммарную фактическую подачу трех насосов на два водовода определяют по координатам Q1+2+3 и НА точки А", т. е. точки пересечения характеристик Н-Qтр 1+2+3 и Н-Qтр 1+2 Для определения подачи одного насоса при их совместной работе следует провести из точки А" линию, параллельную оси абсцисс до пересечения с характеристикой Н-Q,,в точке А.Координаты точки Аопределяют подачу Q,,/3 и напор НАкаждого насоса при их одновременной работе на систему с характеристикой Н-Qтр 1+2.Для нахождения КПД насоса из точки А восставляем перпендикуляр до пересечения с кривой -Q,,в точке 1. Координаты этой точки определяют КПД насоса при параллельной работе трех насосов. Для определения потребляемой мощности и допускаемого кавитационного запаса опускаем перпендикуляр до пересечения с кривыми N-Q,,и h-Q,,в точках 2 и 3. Координаты этих точек соответственно определяют потребляемую мощность и допустимый кавитационный запас насоса при совместной их работе. Из рис. 3 следует, что подача каждого насоса при параллельной работе равна 1/3 их суммарной подачи, т. е. Q1 = Q1+2+3 / 3. При параллельной работе двух из рассматриваемых насосов их подача, напор, потребляемая мощность, КПД и вакуумметрическая высота всасывания определяются по режимной точке Б''. При работе одного из рассматриваемых насосов режим его работы определяется рабочей точкой В. Из рис. 3 видно, что суммарная подача трех и двух параллельно работающих насосов меньше суммарной подачи этих же насосов при раздельной их работе на данную систему напорных трубопроводов, т. е. Qi+ii+iii < 3 Qi и Q1+2 < 2Q1. Снижение суммарной подачи объясняется тем, что при увеличении подачи возрастает напор в трубопроводе (HА> НБи HБ > HВ), что ведет к уменьшению подачи каждого насоса при их совместной работе по сравнению с подачей при одиночной работе насоса на данную систему. Уменьшение подачи зависит как от увеличения напора в трубопроводе, так и от крутизны характеристики насоса. Поэтому параллельная работа насосов может быть достаточно эффективной при пологих характеристиках трубопроводов. Параллельная работа нескольких насосов с разными |