цвет зинченко. Зинченко В.П., Мунипов В.М. ''Основы эргономики%22. Литература 25 Краткая история развития эргономики 27
 Скачать 4.07 Mb. Скачать 4.07 Mb.
|

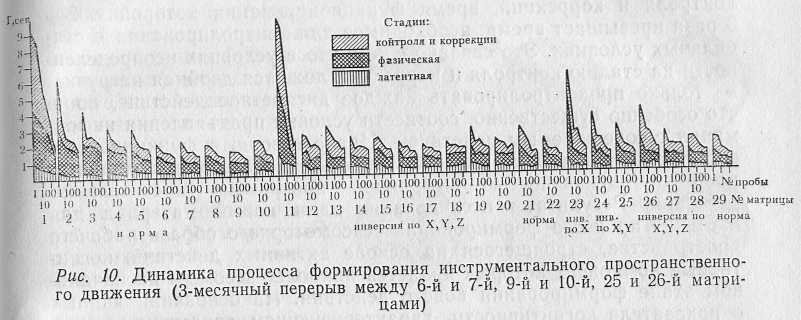 В ходе перестройки навыка наблюдается различная динамика поведения функциональных компонентов, анализ которой позволяет заключить, что более быстрое по сравнению с нормой формирование инвертированного навыка возможно за счет переноса фазических, скоростных черт пространственного действия. Стадия реализации почти полностью сохранила свои характеристики. Инверсия перцептивного и моторного полей незначительно отразилась на скоростных характеристиках фазических элементов действия. В случае когнитивных компонентов мы имеем дело не с переносом, а с интерференцией образа пространства, построенного в условиях нормы, и образа, который еще только строится в условиях инверсии. Это сказалось на характере когнитивных элементов. Более того, именно это же сказалось и на характеристиках стадий реализации на начальных этапах построения нового действия в новых условиях. Фазическая часть действия вновь взяла на себя когнитивные функции. При помощи движения руки испытуемые прощупывают новое пространство и находят признаки этого пространства. Когда построен новый сенсомоторный образ пространства, стадия реализации освобождается от когнитивных функций и начинает работать, как при совместимом пространственном действии, но теперь она реализует другие программы. Когнитивные компоненты продолжают совершенствоваться уже без видимого участия стадии реализации. Таким образом, явления переноса и интерференции имеют разную природу. Перенос происходит за счет исполнительной части действия, а интерференция — за счет когнитивных компонентов, однако явления эти не взаимоисключающие, они взаимодействуют в каждом пространственном действии. Динамические условия предъявления информации сказались в основном на характеристиках когнитивных компонентов исследуемого процесса аналогично изменениям, зарегистрированным при введении инверсии. Особенно резко меняющиеся условия предъявления информации сказались на характеристиках стадии контроля и коррекций, время функционирования которой в 2— 3 раза превышает время, необходимое для контролирования в стабильных условиях. Это связано с тем, что в условиях неопределенности на стадию контроля и коррекций ложится двойная нагрузка: не только проконтролировать каждое дискретное действие, но и, что особенно существенно, соотнести условия предъявления информации с совершаемым действием. Иначе говоря, в функции контроля входит не только проверка результата действия, но и контроль за адекватностью выбранной программы предстоящего действия. Результаты исследования дали новый материал для изучения процесса формирования сенсомоторного образа рабочего пространства, строящегося на основе активных действий, когнитивный компонент которых является наиболее весомым на начальном этапе формирования нового действия. На основании данных о показателе когнитивности, характеризующем динамику временных отношений когнитивных и исполнительных компонентов и выражающемся через отношение суммы времени когнитивных компонентов к исполнительному, явствует, что по мере овладения навыком удельный вес когнитивных компонентов в целостном действии уменьшается. Когда построен образ сенсомоторного пространства, функция когнитивных компонентов сужается до программирования осуществляемого действия, что, естественно, сказывается на уменьшении показателя когнитивности. По сравнению с динамичными условиями в стабильных условиях предъявления информации уменьшение значений показателя когнитивности выражено за счет того, что в статике функция контроля в большей степени редуцирована. На начальных этапах формирования нового действия, в каких бы условиях оно ни протекало, границы между стадиями нечеткие. Разброс между составляющими X, Y, Z внутри каждой стадии настолько велик (в отдельных случаях до секунды), что создается впечатление как бы вхождения одной стадии в другую. Это положение вполне соответствует тезису, сформулированному в контексте системно-структурных исследований, согласно которому менее развитая структура характеризуется меньшей дифференцированностью ее компонентов. Сказанное позволяет сделать два предположения: первое — на начальных этапах обучения возможны параллельное выполнение программы и ее реализация, а также peализация и контролирование; второе, вытекающее из первого, состоит в том, что на начальных этапах формирования навыка выполнение программы, ее реализация и контроль идут отдельно по составляющим движения. Иными словами, происходит последовательное планирование движения по каждой координате. Аналогичным образом последовательно осуществляются реализация и контролирование. Освоенное действие характеризуется значительным уменьшением разброса, а так как разброс характеризует качество действия (его пространственность),то на конечных этапах обучения сформированное действие приобретает черты более четкой функциональной структуры. И если на начальных этапах обучения функциональная структура действия по показателю пространственности сопоставима для различных условий протекания действия, то в конце обучения оказываются сопоставимы действия, формируемые в динамических условиях и в условиях инверсии, которые по значениям показателя разброса в 2— 3 раза превосходят значения этого показателя в условиях нормы. Следовательно, введение инверсии или неопределенности неизменно вызывает ухудшение качества действия, выражающееся в увеличении значений показателя разброса. Иначе говоря, качество действия чрезвычайно чувствительно к различным изменениям, вносимым в условия протекания действия. Знание функциональной структуры действия, исследование динамики ее формирования и становления, установление взаимосвязей и взаимоотношений между компонентами исследуемого объекта открывают возможности контроля за процессом формирования и оптимизации движений и действий. Изменение удельного веса компонентов в структуре действия как в процессе его формирования, так и под влиянием тех или иных изменений, внесенных в условия его протекания, свидетельствует о том, что превалирование того или иного типа регулирования двигательными актами зависит в основном от условий, в ко-  торых действие протекает, и от степени освоенности, обученности. На рис. 11 представлены удельные веса компонентов целостного действия в различных условиях его протекания и на разных этапах его формирования. Соотношение компонентов функциональной структуры целостного действия в начале его формирования сходно независимо от того, в каких условиях протекает действие. В конце формирования сходное соотношение компонентов в структуре действия отмечается у действий, формируемых в динамических и инвертированных условиях; действие, формируемое в условиях нормы, имеет совершенно отличную от них структуру. Ситуация инверсии и динамики и ситуация нормы могут быть сопоставлены в терминах открытого и закрытого контура управления. В условиях нормы после длительной тренировки у испытуемых формировались симультанный образ ситуации и программа, организующая моторный ответ, т. е. значительная часть действия осуществлялась как бы по открытому контуру, что подтверждается значительным удельным весом стадии формирования программ и сравнительно небольшим весом стадии контроля и коррекций. В ситуации инверсии и в динамических условиях предъявления информации в течение проведенных экспериментальных серий сохранилась регуляция по принципу замкнутого контура, о чем свидетельствует удельный вес стадии контроля и коррекций, составляющей примерно 50% от целостного действия. К настоящему времени предложено большое число разнообразных вариантов теорий закрытого контура регулирования, описывающих более или менее сложные акты человеческого поведения и деятельности. Эти теории относятся к таким процессам, как дискретные и непрерывные двигательные процессы, перцептивно-моторные навыки, речевое поведение и т. д. Общие черты этих теорий состоят в том, что закрытый контур предполагает знание субъектом хода осуществления движения. Это знание получается посредством обратной связи от движения и направляется на управление этим движением. Закрытый контур основывается на контроле за информацией от элементов системы, «подсчете» и учете ошибок, указывающих на направление или степень отклонения выхода системы за пределы заданного, исправлении этих ошибок. Основная функция систем закрытого контура состоит в минимизации этих ошибок. Интересный вариант замкнутого контура управления движениями при формировании двигательных навыков предложен Дж. Адамсом [63]. При разработке своей теории Адаме широко использовал представления об акцепторе действия П. К. Анохина, о задающем элементе и приборе сличения Н. А. Бернштейна и о нервной модели стимула Е. Н. Соколова. Теория разработана для объяснения процесса научения простым дискретным движениям, выполняемым в умеренном, ненавязанном темпе, т. е. является теорией формирования двигательного навыка. Она относится в первую очередь к линейным перемещениям руки на заданное расстояние в условиях, когда испытуемый не видит отметку, обозначающую нужное конечное положение руки, а длина пути задается ему или в словесной форме, или он ее усваивает в ходе тренировок, перемещая руку до упора в ограничитель. Согласно Адамсу, центральное место в замкнутом контуре занимают механизмы, с помощью которых информация, получаемая по каналам обратной связи, сравнивается с эталоном для обнаружения ошибок, т. е. в системе предполагается наличие эталонного механизма, в котором фиксировано заданное действие, каналов обратной связи, а также аппарата сравнения, выделения и исправления ошибок. Для формирования навыков первостепенное значение имеет знание о результатах каждого выполненного движения. Это знание используется человеком для того, чтобы перестроить движение и исключить или уменьшить ошибку в каждой после дующей пробе. Подобные последовательные коррекции в конце концов приводят к выработке правильного движения. Эталонный механизм называется перцептивным следом, который представляет собой хранящуюся в памяти информацию о выполненных ранее движениях. Понятие перцептивного следа эквивалентно понятию нервной модели стимула [56]. Перцептивный след представляет собой механизм, который детерминирует амплитуду движения, а возможно и временную организацию движения. Источниками формирования перцептивного следа в общем случае служат все виды обратных связей: зрительная, слуховая, проприоцептивная, а также рецепторы прикосновения и давления. Прочность перцептивного следа возрастает с увеличением числа проб. При этом информация о ранних, малоточных попытках забывается и растет удельный вес последних проб, реализованных с большой точностью. Однако научение движению не сводится к столь простой схеме, по которой достаточно, чтобы был выработан перцептивный след и чтобы стимулы текущей обратной связи оказались соответствующими ему. На начальной стадии научения решающее значение имеет осознанное и вербализованное знание результатов. Эта стадия названа вербально-двигательной. Она заканчивается тогда, когда в ряде реализаций получен удовлетворительный результат и значения ошибок малы. Перцептивный след, достигший определенного уровня совершенства, фиксируется. Дальнейшее научение может уже происходить без знания результатов. Их заменяет сравнение информации обратных связей с высокоточным и прочным перцептивным следом. Эта завершающая стадия названа двигательной. Адамс приводит логические доказательства в пользу существования особого механизма, функция которого заключается в инициации и выборе движения, называемого следом в памяти. След в памяти действует в разомкнутой системе, управляя программнобез коррекции обратными связями движением на начальном участке. Действие следа в памяти и перцептивного следа не совпадает во времени. Вначале включается в управление след в памяти, а несколько позже, когда начинают поступать сигналы обратных связей, управление передается перцептивному следу. Иначе говоря, след в памяти представляет собой двигательную программу, которая лишь актуализирует необходимые для осуществления реакции механизмы и запускает их в ход, а не управляет реализацией более длинной последовательности, как это обычно предполагается в концепции открытого контура. Некоторые движения реализуются на основе только следа в памяти, если двигательная реакция может быть классифицирована как баллистическая. Такая реакция инициируется следом в памяти и завершается до того, как испытуемый окажется в состоянии отрегулировать ее в процессе осуществления, сопоставляя получаемую обратную связь с перцептивным следом. Нужно сказать, что объяснение баллистических движений, осуществляемых за время 100—200 мс, представляет наибольшие трудности для концепции замкнутого контура, так как в этих случаях коррекция должна осуществляться до завершения движения. Для объяснения подобных случаев вводится предположение о том, что двигательный контроль планируется до начала движения. То, что человек может совершать движения, продолжительность которых не превышает 100 мс, использовалось в качестве наиболее сильного (правда, все же косвенного) аргумента в пользу концепции открытого контура. Однако современные исследования в области физиологии проприоцепции дали многочисленные факты, свидетельствующие о том, что проприоцептивная обратная связь может осуществляться за время, существенно меньшее, чем 100 мс. Корковые потенциалы от нервов, расположенных в языке и конечностях, регистрируются через 3—5 мс. Полный цикл от мышечных рецепторов глаза через мозг и обратно осуществляется за 10 мс. Кортикальный ответ на движение руки регистрируется через 10 мс, а полный интервал от поступления двигательного стимула (через кору) и до ответа ЭМГ составляет всего 30—40 мс. Таким образом, двигательная система обладает необходимыми «нейронными скоростями» для того, чтобы регуляция движений осуществлялась по замкнутому контуру и обратная связь использовалась не только на всех стадиях обучения, но и при реализации каждого отдельного двигательного акта [75]. Учитывая эти факты, нельзя оставлять без внимания и то немаловажное обстоятельство, что «нейронные скорости» и скорости человеческих действий не совпадают друг с другом. Поэтому сами по себе значения скорости проведения нервных импульсов могут рассматриваться как косвенные доказательства потенциальной возможности прохождения информации по каналам обратной связи. Прямые доказательства этого должны быть получены в психологическом, поведенческом эксперименте. Концепция Дж. Адамса представляет собой заметный вклад в решение проблем построения и управления движениями. В то же время нельзя не отметить, что настойчивое отрицание Адамсом возможностей построения программ и участия их в регуляции движений даже в варианте обобщенных схем представляет собой шаг назад от теории построения движений, предложенной Н. А. Бернштейном. В последние годы появляется все большее число работ, в которых преодолевается альтернатива между концепциями открытого и закрытого контуров и делаются попытки соединить сильные стороны обеих концепций: построение программы и коррекция движений по ходу их реализации с помощью каналов обратной связи. Выше отмечалось, что в теории Н. А. Бернштейна удачно сочетаются концепции открытого и закрытого контуров, т. е. он ввел в свою модель построения движений как программу, так и обратную связь. Аналогичная попытка соединения двух концепций, но с учетом последних достижений в теории и практике изучения движений была выполнена Р. Шмидтом, который, анализируя обе теории, пришел к заключению, что перед ними стоит ряд трудных проблем [75]. Первая проблема связана с хранением и вызовом моторных программ, число которых невозможно себе представить, если принять тезис: «одна моторная программа — одно движение». Теория замкнутого контура также не снимает проблемы хранения; более того, в этом случае должны храниться не только программы, но и эталоны точности, с которыми должно сравниваться каждое движение. Вторая проблема связана с возникновением, или формированием, новых движений. Теоретически проблема формулируется следующим образом: откуда берутся программы или эталоны точности, если исполнители могут продуцировать такие движения, которые никогда ранее точно так же не выполнялись. Наконец, третья проблема состоит в том, каким образом индивидуум приходит к обнаружению собственных двигательных ошибок и к повышению точности при последующих действиях. При этом остаются неясными механизмы обнаружения двух типов ошибок, имеющих различные источники: «шум» в сенсорной или двигательной системах либо внешнее окружение. Перечисленные трудности и побудили Р. Шмидта предложить компромиссный вариант — теорию схем, которая, по его замыслу, в значительной мере их устраняет. Он исходит из того, что в системе управления движениями широко используются оба механизма регулирования и поэтому не имеет смысла классифицировать системы на только открытые или замкнутые. Однако относительная роль каждого из них существенно различается в зависимости от типа и сложности движений, от момента времени выполнения движения и от исследуемого уровня системы. Например, компьютер, с одной стороны, можно рассматривать как систему открытого контура, поскольку он может работать, не принимая во внимание ошибки, которые могут быть в программе, но, с другой стороны, он будет системой замкнутого контура, поскольку программист может обнаружить ошибку после выполнения программы и внести изменения в последующую серию. Точно так же и система открытого контура может иметь петлю обратной связи, которая предупреждает программу, например, от деления на ноль, а если такая попытка предпринимается, то внутренняя петля обратной связи может обнаружить это и внести изменения в выполнение программы открытого контура. Анализ многочисленных данных приводит к заключению, что в человеческом поведении нет моторных программ, продуцирующих движение без обратной связи. Моторная программа представляет двигательным системам все детали работы, необходимые для прохождения конечностью расстояния до определенной цели, а обратная связь необходима для достижения этой цели. Если же появляется необходимость изменить цель движения в связи с происшедшим изменением в окружающей среде, то программа продолжает выполняться по-прежнему в течение некоторого времени (около 150 мс), пока движение не перестроится на достижение новой цели. В этом случае механизмы обратной связи активно обеспечивают достаточное достижение в новых условиях «неверной» цели. Шмидт определяет моторную программу как набор заранее построенных моторных команд, которые после активации реализуются в движение, ориентированное на достижение заданной цели, причем эти движения не затрагиваются периферической обратной связью, сообщающей о необходимости изменения цели. Развивая теорию схем, призванную объединить концепции открытого и закрытого контура, Шмидт постулирует существование двух состояний моторной памяти: одно — для вызова, другое — для узнавания. Вызывающая память является структурой, ответственной за генерирование импульсов к мышцам, производящим движение (или выполняющим коррекцию), в то время как узнающая память представляет собой структур}, ответственную за оценку продуцируемой движением обратной связи, что позволяет вырабатывать информацию об ошибке движения. В теории схем принимается также допущение о существовании «обобщенных» двигательных программ, создаваемых внутри центральной нервной системы и содержащих мышечные команды со всеми деталями, необходимыми для выполнения движения. Роль, выполняемая программой, варьирует в зависимости от продолжительности движения. В случае быстрого движения (т. е. движения, время которого составляет менее 200 мс) двигательный акт выполняется под полным контролем вызывающей памяти, в которой программа заранее определяет все детали движения. В случае более медленных движений движение производится с использованием сразу и вызывания и узнавания. Роль вызывающей памяти здесь заключается в производстве небольших уточняющих движений, а основным фактором, определяющим точность выполнения задания, является сравнение ожидаемой и действительной обратной связи. Следовательно, медленные движения находятся в зависимости от узнающей памяти, хотя субъект может производить корректирующие движения с использованием вызывающей памяти. Теории открытого и закрытого контура, а также различные варианты их объединения представляют собой существенный вклад в понимание механизмов построения и управления человеческими движениями и действиями. В исследованиях, лежащих в основе указанных теорий, накоплен арсенал функциональных элементов, важных для понимания регуляции движений. На очереди решение более сложной исследовательской задачи — установление различных типов связей между этими элементами. Без решения этой задачи теории открытого и закрытого контура не могут претендовать на то, чтобы составить необходимую научную основу практики рационализации, организации и проектирования новых видов трудовой деятельности. Однако при всей оригинальности и обоснованности ряда важных положений они пока остаются общими конкурирующими теориями построения движений и нуждаются не только в согласовании, но и в развитии, детализации, экспериментальной проверке, а возможно и в корректировке отдельных положений. Опыт практической работы в эргономике свидетельствует о том, что переход от общей теории, развитой в физиологии, биомеханике или психологии, к решению практических задач оптимизации или проектирования деятельности и ее средств — дело далеко не простое. Для эргономики недостаточно утверждения о том, что теоретические крайности сходятся и что в реальной деятельности имеется тесное взаимодействие программного и кольцевого управления . движениями и действиями человека. Эргономику интересуют конкретные пределы независимости или сходимости, взаимодействия между программным и кольцевым способом управления применительно к различным видам движения и конкретным условиям, в том числе и временным режимам их осуществления. Живучесть оппозиции между теориями открытого и закрытого контура объясняется следующими обстоятельствами. В качестве предмета исследования брались слишком различные по своему биомеханическому рисунку и по своим задачам движения. Изучались естественные и орудийные, изолированные и цепные (серийные) , быстрые и медленные, врожденные и заученные, вызванные (реактивные) движения. Для их исследования использовались методы, имеющие различную разрешающую способность: от простого наблюдения до весьма совершенных средств регистрации временного и пространственного рисунка движений. Организация движений исследовалась на различных уровнях, и нередки случаи генерализации результатов, полученных на психофизиологических, нейропсихологических, биомеханических и психологических уровнях. Наконец, во многих исследованиях движение либо бралось как целое без достаточного расчленения на свои структурные компоненты, либо в качестве предмета исследования выступали отдельные элементы, изолированные от структуры движения в целом. Все это вызывало и вызывает большие трудности в сопоставлении результатов, полученных в различных исследованиях. Поэтому преодоление оппозиции между теориями открытого и закрытого контуров регулирования по-прежнему остается актуальной научной и практической задачей. В этих теориях, равно как и в экспериментальных исследованиях, на которых они основывались, не уделялось достаточного внимания анализу предметного содержания деятельности. Да и сами исследуемые двигательные акты, как правило, были чрезвычайно элементарны и по своей сложности редко превосходили стандартные варианты стимульно-реактивных схем изучения движения. Средства регистрации двигательных актов предназначались преимущественно для фиксации физиологических процессов, происходящих при реализации движений. Обращает на себя внимание и интерпретация полученного материала, которая ведется преимущественно в терминах теории автоматического регулирования, кибернетики. Даже сами наименования — теория открытого, теория закрытого контура — свидетельствуют о влиянии идей и методов кибернетики. В этом влиянии, разумеется, нет ничего предосудительного, и некоторые полезные аналогии с техническими системами и управлением исполнительными действиями человека действительно помогли прояснить многие проблемы и привели к постановке новых проблем. Н. Е. Введенский когда-то писал: «К сожалению, построения живого мира настолько сложны и оригинальны, что смысл их выясняется обыкновенно лишь после того, как физики и техники придут другими путями к тем же результатам» [15, с. 574]. Но он же предупреждал о том, что, наблюдая за деятельностью какой-либо ткани или органа, «не следует упускать из виду, что каждый раз имеют дело с живыми единицами, поставленными в своей деятельности в условия, общие для всех живых организмов» [там же, с. 566]. Имеется большой соблазн по аналогии с техническими устройствами рассматривать тот или иной орган или функцию как механизм, предназначенный только для известной работы, т. е. вне контекста условий его жизнедеятельности. Однако всякая аналогия имеет свои границы и пределы. Аналогии между глазом и камерой-обскурой или фотоаппаратом давно изжили себя. Речь идет не о том, что теории открытого или закрытого контура уже постигла та же участь, а о том, чтобы выработать еще более широкий взгляд на человеческое движение и действие, включая их в контекст жизнедеятельности. В настоящее время созрели как теоретические, так и методические предпосылки для преодоления оппозиции между теориями открытого и закрытого контура. Теоретические предпосылки состоят в том, что во многих областях исследования психической деятельности успешно преодолевается 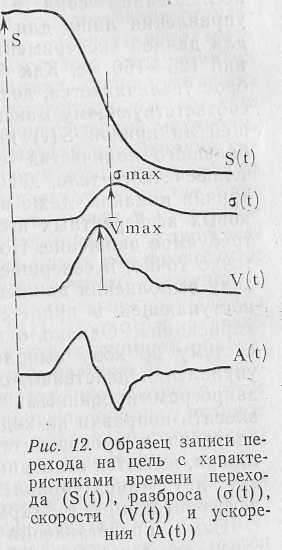 технологический, инженерный подход, в том числе и в его современном информационно-кибернетическом варианте. Методические предпосылки состоят в том, что благодаря использованию ЭВМ на линии эксперимента появились принципиально новые возможности регистрации и анализа движений. В качестве примера приведем исследование [52], предметом которого был анализ соотношений когнитивных и исполнительных компонентов инструментального действия. Экспериментальная ситуация предусматривала быстрое и точное горизонтальное движение к цели, представляющей собой световой квадрат, равный по размеру управляемому квадрату и появляющийся справа и слева от стартовой позиции на горизонтальной оси телевизионного индикатора по программе от ЭВМ. Регистрировались временные и скоростные характеристики движения. На рисунке 12 представлен образец записи перехода на цель, включающий в себя запись параметрического графика зависимости пути от времени, данные по скорости и ускорению совершаемого движения. Данный вид кривых S (t), V(t), A(t ) описывает движения, направленные на быстрое и точное совмещение управляемого пятна с целью. Скорость движения возрастает до середины пути, а затем начинает монотонно падать вплоть до начала корректирующих движений, подводящих управляемое пятно к цели. Изменение скорости движения, в свою очередь, вызвано тем, что усилие, прилагаемое для перемещения руки в пространстве и соответственно орудия, управляемого ею, изменяется во времени. Характер изменения этого усилия описывается изменением ускорения движения во времени A(t), где можно выделить ускоренную часть, соответствующую начальной части движения, когда скорость нарастает от 0 до максимума, и части движения, когда ускорение имеет отрицательный знак. Одновременно для каждой группы реализаций (в зависимости от амплитуды перемещения) был вычислен средний квадратичный разброс (а), т. е. определены участки максимального и минимального отклонения от идеальной кривой. Как показал анализ, максимальное отклонение на кривой (а) отмечено в середине пути там, где, как видно на кривой скорости, она уже достигла своего максимума. Иначе говоря, разброс минимален в начале и конце пути. Отсюда можно предположить. что движения в самом начале своего пути, соответствующие по времени фазе >нарастания ускорения и характеризующиеся минимальным разбросом (а), совершаются по четко отработанной программе для данной группы движений. Эти данные согласуются с данными представителей программного или открытого типа управления движениями, постулирующих наличие набора моторных программ, которые могут синтезироваться в желаемое движение, охватить его целиком и которые не зависят от обратной афферентации. Результаты проведенного исследования свидетельствуют о наличии программного типа управления лишь для начальной части движения, составляющей для данной экспериментальной ситуации и данной группы движений 125—150 мс. Как было .показано, средний квадратичный разброс увеличивается, доходя до своего максимума на участке пути, соответствующему максимальному значению скорости, охватывающей на кривой S (t) интервал, равный 225—275 мс. Вследствие большого количества степеней свободы кинематических цепей человеческого тела, действия реактивных и внешних сил и других причин никакая, даже наиболее точно дозированная, система пусковых афферентных импульсов не может однозначно определить требуемое движение. Но движение все-таки совершается, и достаточно точно, и совершается оно с помощью внесения поправок по ходу выполнения движения, на основе эфферентной сигнализации, поступающей в процессе двигательного акта, путем «сенсорной коррекции». Однако одних импульсов, поступающих в нервную систему по ходу выполнения движения, еще недостаточно для управления действием, они должны сопоставляться с заданными, запрограммированными их значениями, что и дает возможность вносить поправки по ходу выполнения действия; на основе такого сличения и производится коррекция двигательного акта. Иначе говоря, имеются основания для объединения в одном двигательном акте двух типов управления: программного и на основе обратной афферентации, т. е. закрытого типа управления. Сами представления о моторной программе и об обратной связи, являющиеся центральными в этих теориях, тоже нуждаются в объяснении, тем более, что они рассматриваются в этих теориях преимущественно со стороны их физиологических механизмов. А между тем современные исследования открывают в человеческом действии такие осложнения, вариации и направления, о которых не знают биомеханика и физиология, по крайней мере в их нынешнем состоянии. Главное осложнение состоит, видимо, в том, что как программа, так и контроль являются производными от образа, равно как и образ является производным от действия с предметом. Это не логический круг, поэтому разрывать его не нужно, но понять взаимоотношения между действием и образом необходимо; без этого невозможно решить проблему построения движений. Мы не случайно привели выше высказывание И. М. Сеченова о том, что чувствования служат источниками движений не прямо, а через психику, т. е. через образ, который сам является не менее динамичным, чем регулируемое им движение. Понимание этого обстоятельства кардинально отличает теорию Н. А. Бернштейна от теорий открытого и закрытого контура. Рассматривая функции «задающего» элемента, он совершенно справедливо ставит вопрос о происхождении макропрограммы целевого действия и о связи ее с двигательной задачей. Последняя прямо или косвенно определяется ситуацией, сложившейся к данному моменту. В качестве определяющего фактора в возникновении и формировании макропрограммы двигательного акта в теории Бернштейна выступает образ или представление результата действия (конечного или поэтапного). «Привлечение мной для характеристики ведущего звена двигательного акта понятия образа или представления результата действия, принадлежащего к области психологии, с подчеркиванием того факта, что мы еще не умеем назвать в настоящий момент физиологический механизм, лежащий в его основе, никак не может означать непризнания существования этого последнего или выключения его из поля нашего внимания. В неразрывном психофизиологическом единстве процессов планирования и координации мы в состоянии в настоящее время нащупать и назвать определенным термином психологический аспект искомого ведущего фактора, в то время как физиология может быть в силу отставания ее на фронте изучения движений... еще не сумела вскрыть его физиологического аспекта. Однако ignoramus не значит ignorabimus» [7, с. 241]. Несмотря на столь отчетливую постановку проблемы регулирующих функций образа, нельзя не отметить, что эти функции рассматриваются Н. А. Бернштейном в самом общем виде. Вполне понятно, что именно в этом пункте он апеллирует к психологическому исследованию, которое не может обойти проблему формирования образа, выступающего в функции регулятора произвольного двигательного акта. Важным этапом в исследовании произвольных движений и навыков было обращение к их ориентировочно-исследовательским, когнитивным компонентам. А. В. Запорожец показал, что в процессе ориентировочно-исследовательской деятельности складывается образ ситуации и тех действий, которые должны быть осуществлены. Особенно существенным является вклад ориентировки на начальных стадиях формирования произвольных движений [28]. Логика исследования привела А. В. Запорожца и его сотрудников к дифференциации ориентировочно-исследовательских, пробующих и собственно-исполнительных действий. Появились новые аргументы в пользу полифункциональности движений, которые могут выполнять как исполнительные, так и когнитивные функции, что привело к созданию теории перцептивных действий [29—32], были разработаны методы микроанализа когнитивных, в том числе и перцептивных процессов. При этом собственно-исполнительные действия анализировались в самом общем виде: оценивались лишь время их реализации и точность достижения цели. Развитие теории и методического арсенала исследования перцептивных действий позволяет поставить задачу объединения целого ряда подходов к исследованию произвольных движений и навыков: теории построения и развития движений Н. А. Бернштейиа и А. В. Запорожца, теорий открытого и закрытого контура (вместе с различными вариантами их объединения) и теории перцептивных действий. Первая попытка такого объединения была сделана на основе методов микроструктурного анализа исполнительной и познавательной деятельности. В качестве существенного теоретического основания необходимости и полезности объединения названных концепций выдвигалось следующее. При построении движений происходит преодоление избыточных степеней свободы кинематических цепей человеческого тела. Не лишено оснований предположение, что имеется нечто общее между задачей построения движений и задачей построения зрительного образа. При построении образа также происходит преодоление избыточных и неадекватных вариантов отображения одного и того же объекта. С точки зрения регуляции и контроля произвольных движений, видимо, иначе и не может быть, поскольку зрительная система представляет собой существенную часть регулирующего звена двигательного акта. Поэтому в регулирующем звене (кстати, не обязательно связанном только со зрительной системой) должно быть не меньшее число степеней свободы, чем в исполнительном. В противном случае ряд степеней свободы исполнительного звена обязательно будет ускользать от регулирующего [36]. Именно поэтому исходя из принципа иннервации отдельных мышц нельзя объяснить целостный акт движения, нельзя говорить об однозначных связях между иннервационными импульсами и вызываемыми ими движениями. Близкие по смыслу идеи высказывает М. Турвей [78], считающий, что целесообразные движения регулируются не жестким (заранее готовым) паттерном, а образом действия, который сам является постоянно становящейся структурой. Мало вероятно, что для каждого способа выполнения движения существует готовый регуляторный паттерн (шаблон), тем более, что без предварительного научения возможно применение многих способов выполнения движений и действий. Движение реализуется путем подгонки друг к другу координируемых структур, которые являются относительно автономными с точки зрения организации движения. Собственно становление движения может быть понято как гетерархия, в высших областях которой имеется малое количество больших и сложных координируемых структур, а в низших — большое количество маленьких и простых структур. Турвей также считает, что центральное место в организации движения занимает образ предстоящего действия или представление о нем. В соответствии с таким пониманием процесса управления движением первоначальное представление о действии обязательно должно быть неопределенным в сравнении с его окончательным представлением в исполнительных командах для мышц. Проще говоря, «образ действия» не может и не должен быть конструктивным по отношению к конкретным деталям двигательного акта. В образ действия входят обобщенная оценка позы или схемы тела и выделенные перцептивные свойства, которые могут понадобиться для управления движением, представленные также в обобщенной форме. В разворачивающемся движении «образ действия» постепенно конкретизируется на последующих уровнях управления движением путем внесения в него детализированною 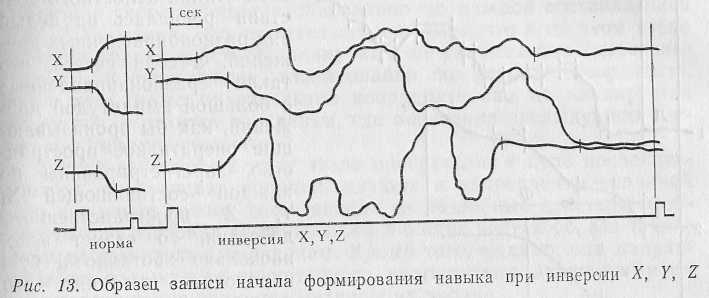 предметного содержания. Причем объединение координированных двигательных структур на каждом уровне происходит с помощью соответствующих, зрительно выделенных свойств внешней среды. Необходимо установить, каким образом и на основании чего формируется новая для данного индивида деятельность, какова ее функциональная структура и каковы компоненты, ее составляющие. Для ответа на поставленные вопросы в экспериментальной ситуации была использована инверсия как средство разрушения сложившегося навыка, при введении которой перцептивные и моторные поля, каждое в отдельности, по сути дела не претерпевали никаких изменений. Нарушалось лишь соответствие между движением манипулятора и перемещением пятна на экране, иначе говоря, в инверсии нарушалось привычное соотношение перцептивного и моторного полей, что, естественно, вызывало разрушение сложившегося в условиях совместимости сенсомоторного образа пространства, т. е. средства стали неадекватны цели. Использование инверсии дало возможность более полно проследить этапы построения нового сенсомоторного образа рабочего пространства [18, 19]. Остановимся подробнее на строении фазической стадии пространственного действия, которая при введении инверсии из пространственной, единой и целенаправленной превратилась в набор большого количества разнонаправленных движений, перемежающихся либо полными остановками, либо значительными замедлениями. Каждая такая остановка говорит о том, что, сделав небольшое движение, испытуемый контролирует себя и намечает (программирует) свой дальнейший путь (рис. 13). По сути дела, в структуре фазы при переходе на один элемент матрицы можно насчитать 3—8 полных циклов, каждый из которых состоит из своих собственных стадий программирования, реализации и контролирования. Иначе говоря, фазическая стадия целостного действия распалась на целый ряд разнонаправленных движений, а если учесть, что такие разнонаправленные с большой амплитудой движения, как бы пронизывающие оперативное пространство, зарегистрированы по каждой составляющей X, Y, Z пространственного действия, то станет ясно, насколько хаотично и беспорядочно выглядит это действие, которое по сути дела нельзя назвать действием, 'поскольку оно не целенаправлено и раздроблено. Его можно представить себе как искусственно соединенные цепи отдельных операций, каждая из которых имеет определенные направления, скорость и точку приложения. Отсюда совершенно ясно, что исконная функция движения — исполнительная — трансформируется на этом этапе овладения действием в функцию познавательную, исследовательскую, ориентирующую. Таким образом, на основе активных действий, прощупывающих рабочее пространство во всех направлениях, функция которых не исполнительная, а исследовательская, начинает строиться новый сенсомоторный образ пространства. На первом этапе построения сенсомоторного образа формируется достаточно обобщенный образ ситуации в целом (рис. 14, кривая 1), который можно назвать этапом построения образа конкретной ситуации. Следующий этап характеризуется большой временной протяженностью, занимая примерно несколько десятков реализаций. 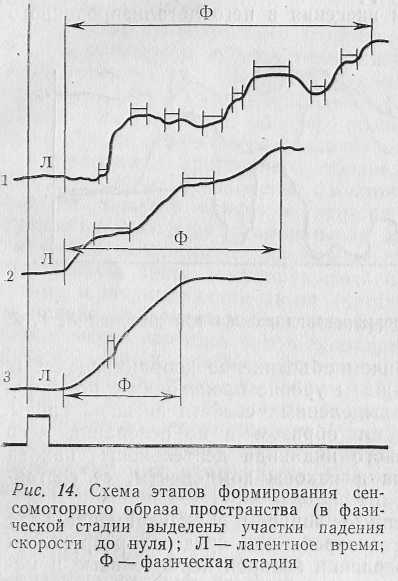 Этот этап характеризуется прощупывающими движениями, идущими в направлении цели (рис. 14, кривая 2). Здесь уже нет разнонаправленных движений большой амплитуды. Движение от одного элемента матрицы к другому как бы делится на ряд последовательных операций, в каждой из которых отчетливо выделяются программирующая, реализующая и контролирующая стадии. Испытуемый как бы квантует воображаемую траекторию на мелкие отрезки, где нарастание скорости осуществления действия сменяется полными остановками. И квантов тем больше, чем менее освоен образ пространства. Необходимо отметить, что увеличение и падение скорости идет изолированно по каждой составляющей X, Y, Z движения. Это свидетельствует о том, что и на этом этапе освоения образа действие планируется не симультанно (пространственно) , а сукцессивно, изолированно по каждой координате. Более того, даже по отдельной координате оно не планируется полностью, а делится на кванты, где окончание предыдущего служит началом следующего. Единое действие на этом этапе превращено в цепь последовательных, пробующих операций, идущих в направлении заданной цели и в конце концов достигающих ее. Подобные действия необходимы для подгонки сложившегося в общих чертах образа к конкретным двигательным задачам. Кроме того, видимо, они направлены на нахождение масштабного соответствия движения руки и местоположения элемента матрицы на экране. Таким образом, второй этап овладения сенсомоторным пространством можно назвать этапом построения образа реальных исполнительных действий. Следующий этап освоения образа сенсомоторного пространства может быть отнесен к образной, ориентирующей части действия только на самых начальных этапах своего формирования (рис. 14, кривая 3). Он характеризуется целенаправленными целостными действиями, функция которых в основном направлена на слияние уже построенного образа ситуации с образом реальных исполнительных действий. Функция эта является достаточно сложной, она требует не механического соединения, а качественного проникновения одного в другое и на основе этого построения симультанного, единого для данных условий сенсомоторного образа рабочего пространства. На его основе затем будет совершенствоваться уже собственно-исполнительная часть действия. Наличие такого единого ориентирующего образа открывает на этом этапе возможность для формирования и совершенствования программы действия, первые попытки построения которой уже наметились на этапе построения образа исполнительных действий. Как возможно соединение регулирующего и исполнительного компонентов, каждый из которых обладает большим числом степеней свободы? Каков процесс ограничения числа степеней свободы в обоих звеньях двигательного акта? Эти вопросы возникают применительно к анализу сформировавшегося двигательного акта,но еще большую остроту они приобретают по отношению к процессу его формирования, по отношению к процессу овладения человеком как традиционными, так и новыми орудиями трудовой деятельности. Исследование характеристик когнитивных компонентов, а также изучение процесса их формирования чрезвычайно важны, так как именно они связывают ориентирующие и исполнительные компоненты деятельности. Сравнительный качественный и количественный анализ характеристик движений руки и глаз, полученный на разных стадиях овладения двигательными навыками, позволил выявить общие закономерности изменения исследуемых параметров [21]. По мере овладения двигательным навыком сокращается как общее время выполнения действия, так и длительность каждой выделенной стадии целостного действия, а также продолжительность периода глазо-двигательной активности. Время программирующей стадии действия пропорционально величине и сложности маршрута движения. При прохождении любого маршрута латентное время движения руки при переходе со стартовой позиции на первую опорную точку маршрута в несколько раз превышает время латентной стадии перехода между любыми другими пунктами данного маршрута, а разница тем больше, чем сложнее маршрут движения. Общая последовательность включения фаз движения руки и глаз всегда одинакова: после подачи сигнала зарегистрирован латентный период движения руки и глаз, сменяющийся периодом глазодвигательной активности, который тем больше, чем сложнее маршрут движения, затем начинается движение руки. Наблюдающиеся в исследовании движения глаз были разделены на два функционально-различных класса. К первому классу относятся ориентировочно-исследовательские движения глаз, зарегистрированные только в латентной стадии движения руки. По мере выработки двигательного навыка наблюдается их постепенная редукция. Функция ориентировочно-исследовательских движений глаз состоит в формировании перцептивно-моторного образа пространства и планировании движения по всему маршруту. Ко второму классу относятся афферентирующие движения глаз, которые разделяются на два типа: прослеживающие движения руки скачки и опережающие движения руки скачки на цель. По мере выработки навыка прослеживающие скачки трансформируются в опережающие скачки. Функция афферентирующих движений состоит в сличении, коррекции и установлении масштабного соответствия заданной программы с реальной задачей. На начальных этапах обучения у испытуемых, не владеющих навыком управления манипулятором, во время латентной стадии движения руки наблюдается большое число движений глаз, пересекающих тестовую матрицу. Эти движения относятся по преимуществу к поступательно-возвратному типу. На стадии реализации у этих испытуемых наблюдаются афферентные прослеживающие движения глаз, сопровождающие исполнительное действие руки (рис. 15). По мере выработки навыка постепенно сокращается число поступательно-возвратных движений глаз. Они сохраняются лишь во время латентной стадии первого перехода, т. е. до начала движеения руки. Этому соответствует и сокращение латентных периодов движения руки каждого перехода на элемент матрицы; в меньшей степени сокращается первый латентный период. Посту- 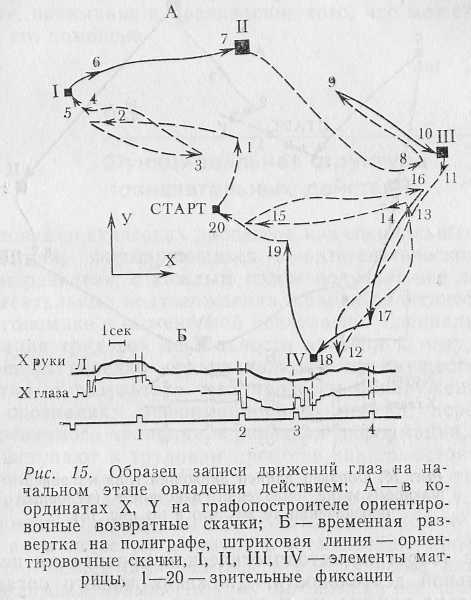 пательно-возвратные скачки глаз трансформируются в поступательные, непосредственно предшествующие исполнительному действию. В свою очередь, при хорошо сформированном навыке афферентные прослеживающие движения глаз трансформируются в опережающие исполнительное действие движения. После опережающего скачка глаз фиксирует цель до окончания исполнительного действия руки, т. е. до совмещения управляемого пятна с соответствующим элементом матрицы (рис. 16). В процессе обучения формируется новый образ пространства и перестраиваются или формируются заново соответствующие экспериментальной ситуации сенсомоторные координации; послетого как построен сенсомоторный образ, начинает активно формироваться программа исследуемого действия. Одним из показателей сформированности образа пространства и пространственного действия являются типы движений глаз, их количество, скорость движения руки и характер сенсомоторного взаимодействия. Из изложенного выше следует, что для понимания процесса превращения человеческой руки в «орудие орудий» необходима 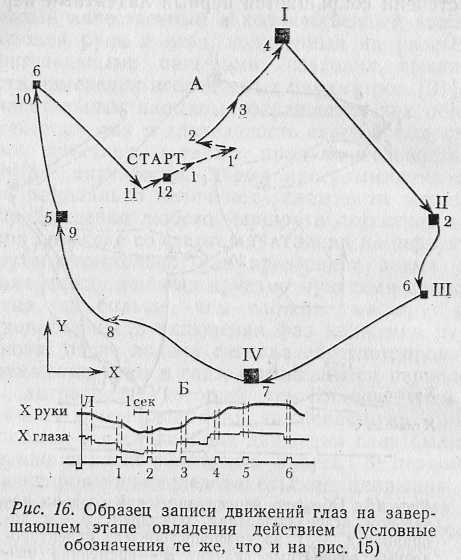 правильная теоретико-методологическая ориентация исследований исполнительной деятельности. Движения живого органа должны быть не только поняты, но и раскрыты как своего рода морфологические объекты, функциональные органы. Функциональным органом «является всякое временное сочетание сил, способное осуществить определенное достижение» [58, с. 71]. Аналогия между движениями живого органа и анатомическими органами или тканями убедительно обосновывалась двумя главнейшими его свойствами: «... во-первых, живое движение реагирует, во-вторых, оно закономерно эволюционирует и инволюционирует» [7, с. 178]. Подобная трактовка живого движения, выделение в качестве объекта исследования его «биодинамической ткани» задает новую стратегию его научного изучения и практической организации. В частности, она означает и то, что движение, моторная схема, навык не могут быть усвоены — они должны быть построены субъектом. «Упражнение — это повторение без повторений» [7]. Известно, что по мере овладения человеком определенной системой движений, последняя стереотипизуется. Но далее «... эта система, бывшая раньше чем-то внешним, являвшаяся объектом усвоения, превращается постепенно в своеобразный орган индивидуальности, в средство выражения и реализации отношения человека к действительности» [28, с. 394]. Современную эргономику все в большей мере интересует строение этого «органа индивидуальности», понимание и предвидение того, что может быть реализовано с его помощью. |