цвет зинченко. Зинченко В.П., Мунипов В.М. ''Основы эргономики%22. Литература 25 Краткая история развития эргономики 27
 Скачать 4.07 Mb. Скачать 4.07 Mb.
|

8Оптимизация рабочих движений и органов управления§1. Оптимизация рабочих движенийПри создании научных основ проектирования средств деятельности человека в системе «человек-машина» как в советской, так и в зарубежной эргономике и инженерной психологии основное внимание уделялось разработке требований к информационным моделям и средствам предъявления информации, и значительно меньшее — разработке требований к органам управления, которые представляют элементы рабочего места, предназначенные для передачи управляющих воздействий от человека к машине. Для комплексного решения проблемы одинаково важно проектирование на современном уровне как средств предъявления информации, так и органов управления с учетом эргономических требований. Характер, последовательность, темп и ритм рабочих движений во многом задаются формой и конструкцией инструментов, органов управления, машин и другого оборудования, а также организацией рабочих мест. Поэтому при их конструировании и организации необходимо учитывать следующие правила экономии движений: — при работе двумя руками движения их должны быть по возможности одновременными, симметричными и противоположными по направлению. Одновременность и симметричность движений обеспечивают равновесие всего корпуса, что облегчает выполнение работы; — проектируемые движения должны быть простыми, плавными и закругленными. Для выполнения рабочей операции необходимо применять наименьшее количество движений; — траектория рабочих движений не должна выходить за пределы рабочей зоны; — движения должны отвечать анатомической структуре тела и осуществляться по возможности в зоне зрительного контроля. Каждое движение должно заканчиваться в положении, удобном для начала следующего движения, причем последующее и предыдущее движения должны быть плавно связаны между собой; — движения должны быть не только простыми, но и ритмичными. Нельзя допускать слишком медленных или слишком быстрых ритмов. При этом следует иметь в виду, что «так называемые «неритмичные» движения — это не лишенные ритма движения, а движения либо с отклонениями от заданного ритма, либо нерациональные движения, что отражается на ритме» [4, с. 66]; — движения должны быть привычными для рабочего. При обучении новой операции или знакомстве с новым оборудованием следует учитывать особенности ранее сформированных у рабочего навыков; — необходимо создать условия, при которых для преодоления слабых сопротивлений использовались бы малые мышечные группы, а при наличии значительных препятствий включались в действие большие группы мышц; — с целью уменьшения мышечной работы в максимально возможной степени должна использоваться кинетическая энергия объекта работы. Не следует проектировать элементы оборудования, требующие приложения больших физических усилий или обусловливающие нерациональные рабочие позы. Так, рабочий не должен продолжительное время держать руки над головой, так как при этом очень быстро наступает утомление. Очень утомительна также поза, при которой рабочему надо ложиться на землю, сгибаться или становиться на корточки. При проектировании оборудования необходимо создать предпосылки для обеспечения рациональных рабочих движений. Поэтому следует проектировать такие орудия труда, которые максимально приспособлены к энергетическим, силовым и скоростным характеристикам и возможностям человека. Для обеспечения рациональных рабочих движений из трудового процесса необходимо исключить лишние, малоэффективные и утомительные движения и действия, такие, как перекладывание предметов труда или инструмента из одной руки в другую, постоянное поддерживание руками деталей во время ее обработки, излишние нагибания, повороты, приседания и другие ненужные движения, вызывающие преждевременное утомление работающих, и выбирать из всех возможных движений наиболее короткие по траектории и требующие минимальных усилий. При проектировании оборудования следует учитывать некоторые, обусловленные физиологическими, психологическими и анатомическими особенностями человека правила и положения, касающиеся скорости и точности рабочих движений и экономии рабочих усилий. Скорость рабочих движений: — там, где требуется быстрая реакция, движение к себе предпочтительнее;— в горизонтальной плоскости скорость рук быстрее, чем в вертикальном направлении, наибольшая скорость движений сверху вниз, наименьшая от себя — снизу вверх; — скорость движений слева направо для правой руки больше, чем в обратном направлении; — скорость движения правой руки больше, чем левой; — скорость движения под углом к вертикальной и горизонтальной плоскости меньше, чем в этих плоскостях; — вращательные движения быстрее, чем поступательные; — движения с большим размахом более быстрые; — плавные криволинейные движения рук осуществляются быстрее, чем прямолинейные с внезапным изменением направления; — скорость движения уменьшается с увеличением нагрузки; — движения, ориентированные механизмами, быстрее, чем движения, ориентированные на глаз; — движения одной рукой совершаются с наибольшей скоростью под углом 60° к плоскости симметрии, двумя руками — под углом 30°; — максимальный темп вращательных движений — 4,0—4,8 об/с, нажимных движений для ведущей руки — 6,6 нажимов в 1 с, для неведущей — 5,3 нажима в 1 с. Максимальный темп ударных движений—от 5 до 14 уд/с, оптимальный для длительной работы 3,5—6,0 уд/с Точность движений: — точные движения лучше выполняются сидя, чем стоя; — наибольшая точность движений достигается в горизонтальной плоскости в зоне, расположенной на расстоянии 15 — 35 см от средней линии тела, при амплитуде движения в локтевом суставе 50 — 60°; — точность попадания рукой в заданную точку составляет 15 — 20 см в средней зоне ниже груди и 30 — 40 см в крайних зонах; — при работе вслепую в горизонтальной плоскости короткие расстояния человеком преувеличиваются, а длинные преуменьшаются, в вертикальной плоскости — преувеличиваются; — наиболее точно оцениваются движения с амплитудой 8— 12 см; — при движениях в вертикальной «плоскости ошибки меньше, чем в горизонтальной. Наилучшие направления движений в этом отношении — влево вверх и вправо вниз под углом 40° к горизонтали; — точность движений обеих рук при оптимальных для каждой руки амплитудах движений одинаковая, но оптимальные амплитуды для обеих рук различны — для правой руки амплитуда больше, чем для левой, на 4 — 5°; — пространственная точность движений при небольшой нагрузке (до 25% максимального усилия) наилучшая, при значительных усилиях снижается. Зависимость пространственной точности движений от их скорости следующая: — для вращательных движений наилучшая точность при скорости 140—200 об/мин, для ударных—60—70 движений в минуту. Экономия усилий: — сила, развиваемая рукой, зависит от ее положения: давление и тяга сильнее при движении руки перед корпусом, чем при движении сбоку; — если при работе используются обе руки, то следует учесть, что сила правой руки больше, чем левой, на 10% для сгибателей пальцев и на 3 — 4% для сгибателей и разгибателей предплечья; — максимальные усилия в положении стоя развиваются на уровне плеча, в положении сидя — на уровне локтя; — наибольшая сила в положении стоя развивается движением на себя; — сила давления больше при согнутой руке, чем при вытянутой; — сила тяги по горизонтали больше при движении перед собой, чем при движении сбоку; — в положении сидя давление сильнее, чем тяга; — сила сгибателей предплечья больше при согнутой, чем при вытянутой руке; — величина усилий, развиваемых рукой в положении сидя, при движении в различных направлениях, располагается примерно в следующем порядке: давление (горизонтальное), тяга (горизонтальная) , движение вверх, движение вниз, движение к себе (сбоку), движение от себя (сбоку); — сила вращения руки зависит от ее положения и направления вращения — при повороте внутрь развивается более значительная сила, чем при обратном движении; — сила давления ног сидящего человека больше, когда они вытянуты вперед (с тупым углом в коленном суставе), чем при положении с прямым углом в коленном суставе. В психологии труда выявлено, что движения организуются не только пространственно, но и музыкально, подчиняясь определенному ритму. В свое время обратили внимание на то, что наиболее квалифицированные наборщики при составлении полосы набора из отдельных букв выполняют круговые движения, которые, на первый взгляд, кажутся менее целесообразными, чем прямолинейные. Между тем круговая (дуговая) линия в большей степени .обеспечивает непрерывность ритма и подчиненность движения определенной ритмической структуре. Поэтому в определенных случаях не самое скорое движение — самое рациональное и не самое короткое движение— тоже самое рациональное. Выявление соответствующих закономерностей организации движения возможно только на основе глубокого психологического анализа деятельности. §2. Общие требования к органам управленияКаждому типу исполнительных (управляющих) действий оператора свойственны свои биомеханические особенности, учет которых необходим при выборе конструкции и размещении органов управления. Поэтому основное внимание уделяется органам управления, обеспечивающим реализацию решений, принимаемых операторами автоматизированных систем, т. е. обеспечивающим ручной ввод информации, ее вызов на устройство отображения и контроля, установку измеряемых или отсчитываемых величин, а также воздействие на исполнительные органы объектов управления (пуск и остановку механизмов, переключение режимов работы и т. п.). Поскольку различные органы управления могут применяться для осуществления одних и тех же функций, постольку при выборе этих органов следует учитывать удобство их эксплуатации, безопасность, технологичность конструкции, а также принципы технической эстетики. Такой учет представляет собой трудную задачу, так как оцениваемые подобным образом параметры органов управления должны, помимо того, обязательно соответствовать антропометрическим и биомеханическим данным. Результаты совокупной оценки, как правило, обобщаются. На их основе создаются стандарты и нормали, хотя многие из этих результатов еще остаются на уровне общих требований. К общим требованиям относятся следующие. Органы управления выбираются с таким расчетом, чтобы направление их движения соответствовало направлению движения связанного с ними индикатора, элемента оборудования или средства передвижения. Движение органа управления вперед, по часовой стрелке, вправо или вверх, а также нажатие на него должны соответствовать включению оборудования или его элемента, увеличению измеряемой (отсчитываемой) величины, а также движению оборудования или его элементов вперед, по часовой стрелке, вправо или вверх. Вращающиеся регуляторы клапанов должны открывать клапаны при вращении против часовой стрелки. Органы управления клапанами снабжаются двунаправленными стрелками, показывающими направление закрывания и открывания клапана с соответствующими надписями (например «Открыто», «Закрыто»). Если воздействия на органы управления осуществляются в определенной последовательности, то органы управления должны быть соответствующим образом сгруппированы. При этом их следует располагать так, чтобы облегчить оператору работу (сохраняя привычный порядок действия — слева направо и сверху вниз). Особо важные и часто используемые органы управления должны иметь наиболее удобное расположение для их досягаемости и захвата. Это относится в первую очередь к вращающимся органам управления и требующим тонкой установки (настройки). Органы управления, применяемые исключительно для технического обслуживания и регулировки, относятся к категории редко используемых, поэтому они должны быть закрыты, но вместе с тем легко досягаемы. Органы управления, выполняющие сходные функции, располагаются единообразно на разных панелях. Органы управления, используемые для выполнения одних и тех же функций на различных панелях, должны быть одного и того же размера. Формы органов управления должны легко идентифицироваться и не иметь острых краев. Органы управления должны быть удобными и при работе в рукавицах или перчатках. Для этого размеры органов управления дополнительно уточняются. Если необходимо работать вслепую, органы управления должны кодироваться формой или находиться на расстоянии не менее 12 см от соседних органов управления. Органы управления конструируются и располагаются таким образом, чтобы их нельзя было случайно сдвинуть. Особое внимание обращается на критичные органы управления, неосторожное и случайное перемещение которых может привести к повреждению оборудования, ранению операторов или ухудшению системы. Расположенные на внутренней части панели или открытые органы управления следует защищать от случайного срабатывания. Для защиты органов управления от случайного срабатывания в зависимости от конкретных условий необходимо: располагать и ориентировать органы управления таким образом, чтобы оператор при нормальном выполнении своих функций не мог случайно задеть или передвинуть их; использовать экранирование и другие способы защиты; обеспечить органы управления надежной блокировкой; создать в органах управления механическое сопротивление (т. е. вязкое или кулоновское трение, нагрузку пружиной или инерцию), чтобы для перемещения органов управления нужно было приложить определенное усилие; обеспечивать органы управления замками для предотвращения перехода в запрещенное положение; использовать вращающуюся конструкцию органов управления. Автоматический тормоз, который обеспечивает автоматическое переключение системы в некритическое рабочее состояние в случае снятия усилия, применяется во всех случаях, когда оператор не способен выполнить работу, и это может привести к критическому состоянию системы. §3. Требования к отдельным видам органов управленияВращающиеся селекторные переключатели. Их следует использовать для дискретного переключения, когда нужно получить три или более фиксированных положения; не рекомендуется их применять для двухпозиционного переключения (кроме случаев, когда визуальная идентификация положения имеет первостепенное значение, а быстрота переключения не критична). Переключатели, постоянно находящиеся в поле зрения оператора, не должны иметь более 24 фиксированных положений. Вращающиеся селекторные переключатели снабжаются движущейся стрелкой и неподвижной шкалой. Движущаяся стрелка должна иметь форму полоски с параллельными сторонами и заостренным указательным концом. Кодирование стрелок формой можно использовать при ограниченном пространстве и небольшом вращающем моменте, а также в тех случаях, когда несколько вращающихся селекторных переключателей, выполняющих различные функции, расположено на одной и той же панели, что может привести к путанице при манипуляциях. Необходимо также учитывать следующие условия: там, где это возможно, позиции вращающегося переключателя не следует располагать непосредственно друг против друга; в начале и конце диапазона изменения позиций необходимо предусмотреть стопоры; механическое сопротивление переключателя должно быть плавным, сначала нарастающим, затем уменьшающимся по мере приближения к фиксированному положению, чтобы переключатель переводился в очередное положение скачком без промежуточных остановок. Влияние трения и инерции должно быть сведено к минимуму. На вращающихся селекторных переключателях проводится ориентнрная опорная линия. Контраст этой линии с цветом самого переключателя должен составлять не менее 50%. Стрелку переключателя помещают достаточно близко к шкале, чтобы свести к минимуму параллакс между стрелкой и отметками шкалы. При наблюдении из нормального для оператора положения ошибка за счет параллакса не должна превышать 25% расстояния между отметками шкалы. При манипулировании переключателем оператор должен хорошо видеть шкалу и стрелку переключателя, причем деления на шкале не должны закрываться рукой. Если ручки переключателей находятся слева от оператора и управляются левой рукой, деления на шкале и надписи размещаются сверху и справа от переключателя; если ручки находятся справа от оператора и управляются правой рукой, деления на шкале и надписи располагаются сверху и слева от переключателя. Отметки часто используемых режимов включения на шкале переключателей должны быть расположены в наиболее удобной для обзора части шкалы. Вращающиеся селекторные переключатели следует размещать в оптимальной рабочей зоне. В случае групповой установки нескольких одинаковых переключателей они лучше различаются при увеличении расстояния между группами, при введении обозначений выполняемых с их помощью функций при установке между ними других органов управления. Торцевые переключатели. Торцевые переключатели рекомендуется использовать в качестве компактного устройства цифрового ввода-переключения при одновременном считывании вводимых цифр для проверки. Использование таких переключателей для каких-либо иных целей нежелательно. Торцевые переключатели могут быть как дискретного, так и плавного действия в зависимости от конкретного применения. Каждой позиции торцевого переключателя на его окружности соответствуют слегка вогнутая поверхность либо участок накатки, несколько выступающий по сравнению с остальной поверхностью. Торцевые переключатели-колесики плавного действия должны иметь накатку по всей наружной поверхности. Торцевые переключатели можно кодировать положением, пометками и цветом (например использованием для колесика с наименее значащей цифрой другого цвета, как в обычных спидометрах). В случае их использования в качестве устройства ввода они должны иметь цветовое кодирование положения «Включено» и «Нормально» для облегчения проверки и контроля. Конструкция торцевого переключателя должна позволять видеть цифровой отсчет в строку из всех рабочих положений оператора. Торцевые переключатели с дискретным положением снабжаются фиксаторами. Сопротивление этих фиксаторов должно быть плавным, сначала нарастающим, а затем уменьшающимся по мере приближения к фиксированному положению, чтобы переключатель западал в очередное фиксированное положение без задержки. Расстояние между соседними краями торцевых переключателей должно быть достаточным для того, чтобы предотвратить случайное переключение соседнего переключателя во время нормальной работы. Поворотные ручки. Они используются тогда, когда требуется прилагать незначительные усилия и когда нужно осуществлять точную регулировку плавно изменяющихся переменных. Если нужно различать положения немногооборотной ручки, на ней предусматривают указатель или метку. При крайней ограниченности размеров панели размеры ручек должны приближаться к минимальным и сопротивление ручек вращения должно быть как можно меньше, однако случайное прикосновение к «им не должно изменять их положение. Рукоятки и маховички. Под рукояткой обычно понимается как часть любого органа управления, которую человек непосредственно захватывает рукой (рукоятка тумблера, рычага, кривошипа и т. д.), так и самостоятельный орган управления (собственно рукоятка). Форма собственно рукоятки весьма разнообразна. Они могут быть плоскими, удлиненными, в форме «клювика» и т. д. Характерной особенностью этих рукояток является то, что для вращения их захватывают пальцами с обеих сторон оси. Собственно рукоятки чаще всего используются для плавной или ступенчатой регулировки параметра, для включения или выключения, а также в качестве многопозиционных переключателей. Для повышения точности управления сопротивление рукояток усилию оператора должно составлять 0,7—1,2 кг. При их переключении оператор должен ощущать переход через фиксационную точку (точки), но дополнительное усилие в момент перехода должно быть не более 10% основного. Величина рукояток зависит от прилагаемого усилия. Так, для усилий, равных 0,13—0,19 кг/м, диаметр рукоятки составляет 75 мм, а для усилий от 0,19 до 0,25 кг/м— 100 мм. Максимальный диаметр рукоятки — не более 140 мм, минимальный — не менее 12 мм. Рекомендуемый диаметр рукояток, захватываемых тремя пальцами, — 10—16 мм. Эти рукоятки позволяют за один перехват произвести поворот на 100—120°. В случае использования стержневых рукояток для ступенчатого переключения минимальный интервал между позициями должен быть не менее 45°, а каждая из позиций иметь фиксатор. Сопротивление фиксаторов при переводе переключателей из одного положения в другое следует постепенно изменять в пределах от 0,06 до 0,01 кг/м. Рукоятки для операций регулирования и настройки, не требующих большой точности, могут выполняться в форме ключей, работающих по принципу «больше — меньше», если средняя частота управляющих действий не превышает одного действия за 20—30 с. Рукоятки ключей окрашиваются в такой же цвет, как и соответствующие им мнемознаки. Рукоятки следует монтировать на панелях пульта так, чтобы рука при этом не закрывала надписей и индикаторов. Поэтому все обозначения и надписи при расположении рукояток слева и управляемых левой рукой должны размещаться сверху и справа от рукоятки, а при размещении рукояток справа и управляемых правой рукой — сверху и слева. Кривошипные рукоятки применяются главным образом в тех случаях, когда операции управления требуют выполнения многих оборотов, в особенности с высокой скоростью или с приложением большого усилия. При необходимости кривошипные рукоятки можно устанавливать на ручки или маховички: кривошипная ручка служит для быстрого проворачивания, а ручка или маховичок — для точной регулировки. Если кривошипные ручки используются для настройки или других целей, требующих выбора цифр, каждый оборот ручки должен соответствовать значениям, кратным 1; 10; 100 и т. д. Рукоятка кривошипа должна свободно вращаться вокруг своей оси. Маховички, предназначенные для работы двумя руками, используются, когда вращательное усилие или момент сдвига велики для. работы одной рукой, маховичок в этом случае должен быть снабжен двумя ручками. Для увеличения сцепления с рукой оператора маховичок имеет накатку или рифление. Маховички должны вращаться по часовой стрелке для выполнения операций «Включено» или «Увеличить» и против часовой стрелки для операций «Выключено» или «Уменьшить». Направление движения указывается на самом маховичке или в непосредственной близости от него стрелкой с соответствующей надписью. Кнопки и клавиши. Кнопки применяют для быстрого включения и выключения аппаратуры, для ввода цифровой или логической информации и команд, в особенности при частом выполнении этих действий. Поверхность кнопки должна иметь вогнутую форму, соответствующую строению пальца, и рифление для предотвращения соскальзывания. Для часто используемых кнопок наиболее удобна четырехугольная форма с закругленными углами или закругленной верхней кромкой. Редко применяемые кнопки могут иметь круглую форму. Конструкция кнопки должна обеспечивать оператору ощущение щелчка, слышимый щелчок или и то и другое. Если случайное включение или выключение кнопки может создать аварийную ситуацию, кнопку следует углубить или снабдить защитной крышкой. Нормальным положением для кнопок клавиш является размещение их на уровне локтя сидящего оператора (локоть согнут под углом 90°, предплечье расположено горизонтально). Кнопки целесообразно размещать на панели, наклонной к поверхности стола. Оптимальный угол наклона клавиатуры кнопочного пульта составляет 15° к горизонтальной плоскости. Расстояние между соседними краями кнопок, за исключением кнопок, используемых в клавиатуре, должно быть не менее 12 мм (при работе одним пальцем последовательно не менее 6 мм). Минимальный диаметр кнопок под указательный палец — 9 мм, под, большой — 18 мм. Усилие нажатия для часто используемых кнопок равно 280— 1100 г, для редко используемых — до 1500 г. Цвет кнопок должен контрастировать с цветом панели: на панели темного цвета кнопки делают светлыми (белого, серого или бежевого цвета). Светлый фон панели требует окраски кнопок в более темные или яркие насыщенные цвета. Для ввода цифровой информации часто используются десятиместные кнопочники, каждая кнопка которого служит для ввода в канал связи (ЭВМ) одной цифры. На кнопочнике имеется также•специальная кнопка «Сброс» для отмены неверно набранной информации. Если цифровая информация, предназначенная для передачи, укладывается в пределы одного десятка, кнопочник устанавливается горизонтально, а кнопка сброса размещается справа. Если же требуется передавать многозначные числа, кнопочники устанавливаются вертикально в виде параллельных столбцов так, чтобы одинаковые цифры располагались в одном горизонтальном ряду. Это позволяет набирать цифры по разрядам десятичной (или иной принятой) системы счисления. Нумеровать кнопки следует сверху вниз. Кнопка «Сброс» находится внизу кнопочника. Расстояние между двумя столбцами должно быть не меньше диаметра кнопки. Для ввода логической или командной информации рекомендуется горизонтальная установка кнопочника с последовательным расположением команд слева направо. Связь между командами следует кодировать, как правило, формой или цветом кнопок. Для кодирования не рекомендуется использовать более четырех цветов. На всех кнопках должно быть краткое обозначение вводимой информации или команды. Особо важные и аварийные команды вводятся минимальным числом кнопок. Такие кнопки выделяются размером, формой и цветом. Размещаются они в верхней части оптимальной рабочей зоны изолированно от остальных кнопок во избежание случайного их включения. Для включения и выключения аппаратуры, а также для ввода набранной на кнопочниках информации в канал связи или в ЭВМ (кнопка «Ввод») и для отмены ошибочно введенной информации или команды (кнопка «Отмена») можно использовать как кнопки, так и клавиши. Клавиша (кнопка) «Ввод» располагается в оптимальной рабочей зоне правее или ниже кнопочников, на которых набирается передаваемая информация. Клавиша (кнопка) «Отмена» имеет тот же размер и форму, что и клавиша «Ввод», но отличается от нее цветом. Кнопки (клавиши) включения и выключения аппаратуры размещаются на пульте в соответствии с частотой их использования в процессе оперативной работы. Если включения и выключения производятся только до работы и после нее, соответствующие кнопки (клавиши) могут располагаться вне рабочей зоны. При наличии на панели или пульте большого числа кнопок их рекомендуется группировать. Количество кнопок в группах как по горизонтали, так и по вертикали следует выбирать кратным. При логическом группировании кнопок и клавиш кнопки рекомендуется размещать под горизонтально расположенной клавишей или справа от клавиши, расположенной вертикально. Ножные кнопки должны нажиматься подушечками пальцев ног, а не пяткой. Если позволяет место, ножные кнопки следует заменять или дополнять педалями, помогающими определять местоположение органа управления. Рабочие поверхности ножных кнопок снабжаются насечкой для увеличения трения. Конструкция кнопки должна обеспечивать оператору ощущение щелчка, слышимый щелчок, световой или звуковой сигнал. Для выполнения операции «Включение» могут использоваться ножная нажимная кнопка или ножной рычаг-выключатель. Рекомендуются следующие размеры ножных кнопок: оптимальный размер — 50—80 мм, величина утапливания —30—50 мм. Необходимое усилие должно находиться в пределах 2—9 кг. На одном рабочем месте не должно использоваться более двух ножных кнопок. Выключатели и переключатели типа «Тумблер». Указанные органы управления представляют устройство для коммутации электрических цепей, приводимых в действие переведением приводного элемента из одного фиксированного положения в другое пальцами руки человека-оператора. Выключатели и переключатели типа «Тумблер» применяются для осуществления операций быстрого включения и выключения, выбора диапазонов в случаях, когда необходим зрительный контроль положения переключателя. Форма и размеры приводного элемента выключателей и переключателей типа «Тумблер» должны соответствовать антропометрическим данным пальцев человека и физиологическим свойствам, а также обеспечивать максимальное удобство захвата приводного элемента в процессе управления. Форма приводного элемента выключателей и переключателей типа «Тумблер» должна быть конусообразной или цилиндрической (цилиндрическую часть на конце приводного элемента допускается выполнять в виде «шарика» или «лопатки»). Для случаев, когда необходимо кодирование, форма приводного элемента может быть любой, но удовлетворяющей требованиям в плане прилагаемых усилий. Допускается также кодирование цветной меткой на торце приводного элемента. В выключателях и переключателях типа «Тумблер» при переводе приводного элемента в другую позицию должна быть обратная связь, ощущаемая в виде «щелчка». Положение приводного элемента выключателей и переключателей типа «Тумблер» «Вверх» или «Вправо» должно соответствовать функциональному состоянию «Включено», а положение приводного элемента «Влево» или «Вниз» — состоянию «Выключено». При расположении выключателей и переключателей типа «Тумблер» в ряд не допускается расположение такого ряда «по вертикали» или «в глубь» панели от оператора. Для обозначения функции приводных элементов выключателей и переключателей типа «Тумблер» необходимо применять надписи и символы. Располагать надписи и символы следует на панели управления в непосредственной близости от приводных элементов с любой его стороны при условии, что сами приводные элементы, а также рука человека-оператора не будут перекрывать обозначение во время манипулирования приводными элементами. По.прилагаемым усилиям переключатели и выключатели типа «Тумблер» делятся на два типа: «легкие» — усилия до 0,7 кг и «тяжелые» — усилия выше 0,7 кг. Размеры приводного элемента зависят от величины прилагаемого усилия и должны соответствовать размерам, приведенным в табл. 14. 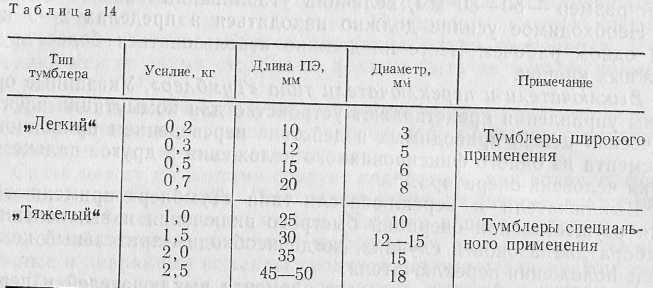 В двухпозиционном переключателе типа «Тумблер» угол перемещения приводного элемента (по средней линии) из одного положения в другое должен составлять 40/60°, в трехпозиционном — 30/50°. Для усилий, превышающих 2,5 кг, следует применять выключатели и переключатели типа «Рычаг». На рабочей поверхности приводных элементов1 не должно быть острых кромок и граней. При размещении тумблеров на панели управления минимальное расстояние между осевыми линиями приводных элементов должно быть 12 мм, при работе в перчатках —25 мм. Если приводные элементы перекидываются в противоположных направлениях, их концы должны быть удалены друг от друга на расстояние не менее чем на 19 мм. Клавиши с надписями. К этим органам управления предъявляются следующие требования: для надежного указания о срабатывании клавиши с надписями должны иметь фиксатор или защелку; надпись на клавише должна хорошо читаться при освещении только одной лампой; должна предусматриваться проверка подсвета нажимом; лампы подсвета или нити накаливания должны быть резервированы; лампы подсвета клавиши с надписями должны заменяться с передней стороны панели; крышки с надписями должны снабжаться направляющими для предотвращения возможности их неправильной установки; на пластинке с надписями допускается не более трех строк. ___________________________ 1 Рабочая поверхность приводного элемента — участок его поверхности, непосредственно соприкасающийся с пальцами руки человека-оператора в момент приведения в действие подвижной системы выключателя или переключателя. Рычаги. Рассматриваются органы управления, предназначенные для выполнения ступенчатых переключений и плавного динамического регулирования одной или двумя руками. Минимальная длина свободной части рычага управления (вместе с рукояткой) в любом его положении должна быть не менее 50 мм для захвата пальцами и 150 мм для захвата всей кистью. Форма, размер рукояток рычагов должны обеспечивать максимальное удобство их захвата и надежного удержания в процессе управления. При этом предпочитают рукоятки с плавными округлыми формами (близкими к шаровидной и удлиненно-цилиндрической), тщательно обработанной гладкой или рифленой поверхностью без острых углов и заусенцев. Рукоятки рычагов, используемых в условиях низкой температуры окружающей среды, должны изготовляться из материалов или покрываться материалами, которые обладают низкой теплопроводностью. Для одновременного выполнения нескольких управляющих действий (более чем в двух измерениях) допускается применять рычаги управления в комбинации и едином конструктивном исполнении с другими типами органов управления (штурвалом, кнопкой, защелкой и др.). Каждый из них должен отвечать своим специфическим эргономическим требованиям. Рычаги управления необходимо устанавливать на рабочем месте так, чтобы их рукоятки при любом положении рычага находились в пределах зоны досягаемости моторного поля оператора с учетом требований безопасности. Рукоятки рычагов, перемещаемых одной рукой, необходимо размещать на стороне соответствующей действующей правой или левой руке в пределах досягаемости при сгибе ее в локтевом суставе под углом 90—135° и приложении усилия по направлению прямо «на себя — от себя». Рукоятки рычагов, перемещаемых двумя руками, размещают в плоскости симметрии сиденья с отклонениями не более 50 мм. Направление перемещения рукоятки рычага должно определяться в зависимости от характера и особенностей управления при соблюдении соответствия с направлением движения управляемого объекта и соответствующего указателя индикатора. Для использования рычагов точного и непрерывного регулирования в отдельных случаях (при наличии сотрясений, 'вибраций, ускорений и др.) должна быть обеспечена опора: локтю — при больших (широких) движениях кистью с предплечьем; предплечью — при движениях кистью; запястью — при движениях пальцами.Кодирование рукояток рычагов управления, в том числе и рычагов специального назначения (аварийных, противопожарных и др.), а также рычагов, объединенных в функциональные группы, необходимо проводить выбором соответствующей формы, размера и цвета, а также расположением. Рычаги управления должны иметь хорошо видимые надписи, обозначающие их назначение, а также указатели положения, направления перемещения и его следствия, помещаемые как непосредственно на рычагах, так и рядом с ними. Рычаги, применяемые для дискретных (ступенчатых) переключений, должны иметь надежную фиксацию промежуточных и конечных положений. В необходимых случаях конечные положения рычага должны быть ограничены специальным стопором (упором). Рычаги управления должны быть установлены так, чтобы при их перемещении исключалась возможность случайного включения (выключения) смежного рычага. Основные размеры рукояток рычагов управления в зависимости от их форм и способа захвата должны находиться в пределах, указанных в табл. 15. Значения усилий, прилагаемых к рукояткам рычагов управления, в зависимости от способа их перемещения и частоты использования должны соответствовать приведенным в табл. 16. При перемещении рычага чаще 2 раз в 1 мин прикладываемое к рукоятке усилие должно быть не более 50% от указанного в табл. 16. Усилие, прикладываемое к рукоятке рычага ручного привода в момент запирания заторного органа или сдвиге (перемещении), не должно превышать 45 кГс. 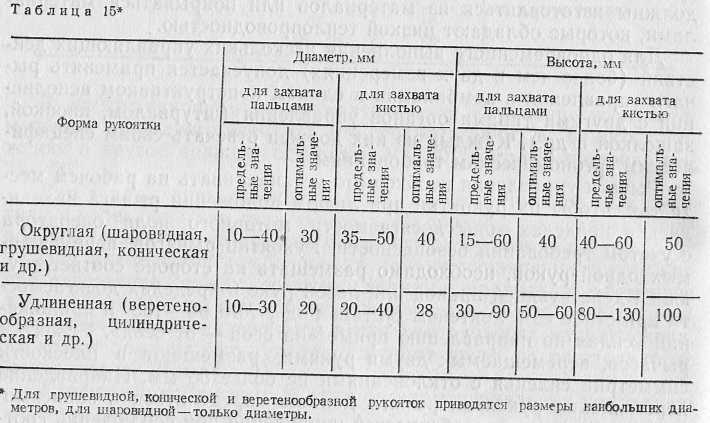 Интервалы между рукоятками смежных рычагов управления,, расположенных в одной плоскости, должны быть не менее: 50 мм— при перемещениях одной рукой последовательно или в случайном порядке; 100 мм — при перемещении одновременно двумя руками; 130 мм — при работе в рукавицах или перчатках; 150 мм — при отсутствии визуального контроля за рычагами. 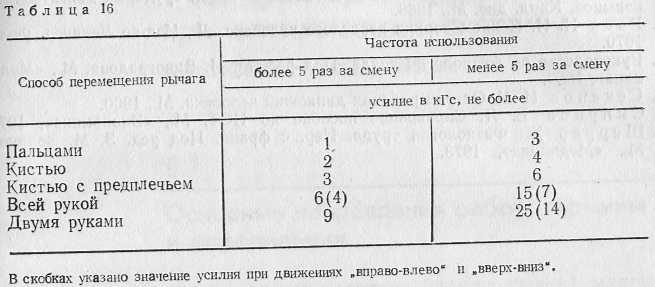 Педали. Эти органы управления часто используются в конструкции рабочих мест транспортных средств, когда руки оператора заняты. Педаль служит как для ввода дискретных сигналов, так и для непрерывного регулирования параметров. При небольшой точности действий с помощью педалей могут быть получены значительные усилия. Педали конструируются таким образом, чтобы они возвращались в нулевое положение после прекращения действия на них силы. Когда угол педали с горизонтальной плоскостью составляет более 20°, следует использовать опору для пятки. Педали должны быть покрыты нескользким материалом. Их длина и ширина должны быть примерно равны максимальным размерам стопы (в соответствующей обуви). ЛИТЕРАТУРА 1. Бернштейн Н. А. Очерки по физиологии движений и физиологии активности. AL, «Медицина», 1966. 2. Биологические аспекты кибернетики. М., Изд-во АН СССР, 1962. 3. Гордеева Н. Д., Девишвили В. М., 3 и н ч е н к о В. П. Микроструктурный анализ исполнительной деятельности. М., изд. ВНИИТЭ, 1975. 4. Донской Д. Д. Биомеханика. М., «Просвещение», 1975. 5. Запорожец А. В. Развитие произвольных движений. М., Изд-во АПН РСФСР, 1960. 6. 3 а п о р о ж е ц А. В., В е н г е р А. В., 3 и н ч е н к о В. П., Р у з с к а я А. Г. Восприятие и действие. М., «Просвещение», 1967. 7. Зинченко В. П., Верти л ее Н. Ю. Формирование зрительного образа. М., Изд-во Моск. ун-та, 1969. 8. Коси лов С. А. Физиологические основы НОТ. М., «Экономика», 1969. 9. Леонтьев А. Н., Запорожец А. В. Восстановление движения. М., «Советская наука», 1945. 10. Ломов Б. Ф. Человек и техника. Л., Изд-во Ленингр. ун-та, 1963. 11. Любомирский Л. Е. Управление движениями у детей и подростков. М., «Педагогика», 1974. 12. Мойкии Ю. В. Особенности становления сложных трудовых двигательных навыков. Канд. дис. М., 1968. 13. Розе Н. Н. Психомоторика взрослого человека. Л., Изд-во Ленингр. ун-та, 1970. 14. Руководство по физиологии труда. Под ред. М. И. Виноградова. AL, «Медицина», 1969. 15. Сеченов И. М. Очерки рабочих движений человека. М., 1900. 16. Смирнов Е. Л. Справочное пособие по НОТ. М., «Экономика», 1973. .17. Ш ер pep Ж. Физиология труда. Пер. с франц. Под ред. 3. М. Золиной. М., «Медицина», 1973. |